|
15363| 4
|
[教程] 使用Mind+ 掌控版 连接EasyIot |
|
开放的IOT平台目前非常多,但根据哥的经验,很多对初学者不是很友好,各种信息类型,各种触发器,想控制个远程开关的,需要学习大量背景知识。幸亏有EasyIOT,没有看来这个平台确实是市面上最简单的,所有的数据类型都是字符串。publish和subscribe 一到两个主题,即可完成简单的物联网监控和远程控制功能。 准备工作: 1. Mind+ 1.5.0及以上版本(传送到这里下载 https://mindplus.cc) 2. 掌控板 我手上是1.0版本 3. 注册一个easyiot账号(传送到这里注册 https://iot.dfrobot.com.cn) 开始干活: 第一步:安装Mind+,打开Mind+ 就不啰嗦拉,一路next即可 第二步:将掌控版插到电脑上 用microUSB线连接,如果电脑上不能显示对应的串口号。安装串口驱动(Mind+内部集成了各类串口驱动) 我的电脑已经安装过了,所以找到了COM7-CP210x,如果你的电脑找不到,点击一键安装串口驱动(需要管理员权限)。 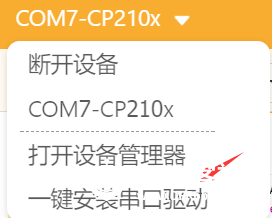 第三步: 切换到上传执行模式  第四步:切换到micropython语言  第五步:选择对应的串口,我的电脑就是COM7 这时,如果你的掌控板没有micropython固件,MindPlus会自动给你烧录固件(注意有些掌控板子出厂缺少2个电阻,烧录过程中需要按下A按键再松开)。之后,Mind+就自动连接到了掌控版的micropython固件。 第六步:新建umqtt文件夹 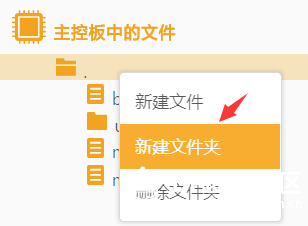 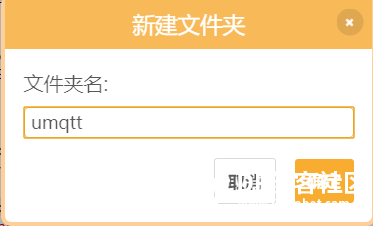 第七步:在umqtt文件夹下新建文件simple.py 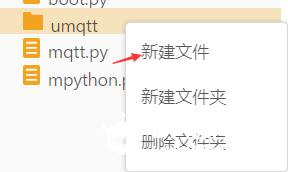  第八步:双击新建的simple.py文件,将下面的内容复制到里边,然后点击保存  [mw_shl_code=python,true]import usocket as socket import ustruct as struct #from ubinascii import hexlify class MQTTException(Exception): pass class MQTTClient: def __init__(self, client_id, server, port=0, user=None, password=None, keepalive=0,ssl=False, ssl_params={}): if port == 0: port = 8883 if ssl else 1883 self.client_id = client_id self.sock = None self.addr = socket.getaddrinfo(server, port)[0][-1] self.ssl = ssl self.ssl_params = ssl_params self.pid = 0 self.cb = None self.user = user self.pswd = password self.keepalive = keepalive self.lw_topic = None self.lw_msg = None self.lw_qos = 0 self.lw_retain = False def _send_str(self, s): self.sock.write(struct.pack("!H", len(s))) self.sock.write(s) def _recv_len(self): n = 0 sh = 0 while 1: b = self.sock.read(1)[0] n |= (b & 0x7f) << sh if not b & 0x80: return n sh += 7 def set_callback(self, f): self.cb = f def set_last_will(self, topic, msg, retain=False, qos=0): assert 0 <= qos <= 2 assert topic self.lw_topic = topic self.lw_msg = msg self.lw_qos = qos self.lw_retain = retain def connect(self, clean_session=True): self.sock = socket.socket() self.sock.connect(self.addr) if self.ssl: import ussl self.sock = ussl.wrap_socket(self.sock, **self.ssl_params) msg = bytearray(b"\x10\0\0\x04MQTT\x04\x02\0\0") msg[1] = 10 + 2 + len(self.client_id) msg[9] = clean_session << 1 if self.user is not None: msg[1] += 2 + len(self.user) + 2 + len(self.pswd) msg[9] |= 0xC0 if self.keepalive: assert self.keepalive < 65536 msg[10] |= self.keepalive >> 8 msg[11] |= self.keepalive & 0x00FF if self.lw_topic: msg[1] += 2 + len(self.lw_topic) + 2 + len(self.lw_msg) msg[9] |= 0x4 | (self.lw_qos & 0x1) << 3 | (self.lw_qos & 0x2) << 3 msg[9] |= self.lw_retain << 5 self.sock.write(msg) #print(hex(len(msg)), hexlify(msg, ":")) self._send_str(self.client_id) if self.lw_topic: self._send_str(self.lw_topic) self._send_str(self.lw_msg) if self.user is not None: self._send_str(self.user) self._send_str(self.pswd) resp = self.sock.read(4) assert resp[0] == 0x20 and resp[1] == 0x02 if resp[3] != 0: raise MQTTException(resp[3]) return resp[2] & 1 def disconnect(self): self.sock.write(b"\xe0\0") self.sock.close() def ping(self): self.sock.write(b"\xc0\0") def publish(self, topic, msg, retain=False, qos=0): pkt = bytearray(b"\x30\0\0\0") pkt[0] |= qos << 1 | retain sz = 2 + len(topic) + len(msg) if qos > 0: sz += 2 assert sz < 2097152 i = 1 while sz > 0x7f: pkt = (sz & 0x7f) | 0x80 sz >>= 7 i += 1 pkt = sz #print(hex(len(pkt)), hexlify(pkt, ":")) self.sock.write(pkt, i + 1) self._send_str(topic) if qos > 0: self.pid += 1 pid = self.pid struct.pack_into("!H", pkt, 0, pid) self.sock.write(pkt, 2) self.sock.write(msg) if qos == 1: while 1: op = self.wait_msg() if op == 0x40: sz = self.sock.read(1) assert sz == b"\x02" rcv_pid = self.sock.read(2) rcv_pid = rcv_pid[0] << 8 | rcv_pid[1] if pid == rcv_pid: return elif qos == 2: assert 0 def subscribe(self, topic, qos=0): assert self.cb is not None, "Subscribe callback is not set" pkt = bytearray(b"\x82\0\0\0") self.pid += 1 struct.pack_into("!BH", pkt, 1, 2 + 2 + len(topic) + 1, self.pid) #print(hex(len(pkt)), hexlify(pkt, ":")) self.sock.write(pkt) self._send_str(topic) self.sock.write(qos.to_bytes(1, "little")) while 1: op = self.wait_msg() if op == 0x90: resp = self.sock.read(4) #print(resp) assert resp[1] == pkt[2] and resp[2] == pkt[3] if resp[3] == 0x80: raise MQTTException(resp[3]) return # Wait for a single incoming MQTT message and process it. # Subscribed messages are delivered to a callback previously # set by .set_callback() method. Other (internal) MQTT # messages processed internally. def wait_msg(self): res = self.sock.read(1) self.sock.setblocking(True) if res is None: return None if res == b"": raise OSError(-1) if res == b"\xd0": # PINGRESP sz = self.sock.read(1)[0] assert sz == 0 return None op = res[0] if op & 0xf0 != 0x30: return op sz = self._recv_len() topic_len = self.sock.read(2) topic_len = (topic_len[0] << 8) | topic_len[1] topic = self.sock.read(topic_len) sz -= topic_len + 2 if op & 6: pid = self.sock.read(2) pid = pid[0] << 8 | pid[1] sz -= 2 msg = self.sock.read(sz) self.cb(topic, msg) if op & 6 == 2: pkt = bytearray(b"\x40\x02\0\0") struct.pack_into("!H", pkt, 2, pid) self.sock.write(pkt) elif op & 6 == 4: assert 0 # Checks whether a pending message from server is available. # If not, returns immediately with None. Otherwise, does # the same processing as wait_msg. def check_msg(self): self.sock.setblocking(False) return self.wait_msg() [/mw_shl_code] 第九步:在根目录下新建mqtt.py文件,将下面的文件内容拷贝到里边 [mw_shl_code=python,true]from mpython import * from umqtt.simple import MQTTClient from machine import Pin import network import time SSID="替换成你的wifi名称" PASSWORD="替换成你的wifi密码" SERVER = "182.254.130.180" CLIENT_ID = "nouse" TOPIC = b"替换成你的TOPIC" username='替换成你的easyiot用户名' password='替换成你的easyiot用户密码' state = 0 c=None def sub_cb(topic, msg): global state print((topic, msg)) oled.DispChar(' ',0,32) oled.DispChar('接收到'+str(msg,'utf-8'), 0, 32) oled.show() def connectWifi(ssid,passwd): global wlan wlan=network.WLAN(network.STA_IF) #create a wlan object wlan.active(True) #Activate the network interface wlan.disconnect() #Disconnect the last connected WiFi wlan.connect(ssid,passwd) #connect wifi while(wlan.ifconfig()[0]=='0.0.0.0'): time.sleep(1) def button_a_callback(_): c.publish(TOPIC,"buttonA") def button_b_callback(_): c.publish(TOPIC,"buttonB") #Catch exceptions,stop program if interrupted accidentally in the 'try' try: connectWifi(SSID,PASSWORD) server=SERVER c = MQTTClient(CLIENT_ID, server,0,username,password) #create a mqtt client c.set_callback(sub_cb) #set callback c.connect() #connect mqtt c.subscribe(TOPIC) #client subscribes to a topic print("Connected to %s, subscribed to %s topic" % (server, TOPIC)) button_a.irq(trigger=Pin.IRQ_FALLING, handler=button_a_callback) button_b.irq(trigger=Pin.IRQ_FALLING, handler=button_b_callback) oled.fill(0) oled.DispChar('连接'+server,0,0) oled.show() while True: c.wait_msg() #wait message finally: if(c is not None): c.disconnect() wlan.disconnect() wlan.active(False)[/mw_shl_code] 第十步:这是一个补充步骤,给那些还没用过的easyiot的人准备的,如果找到用户名 密码和topic  点击发送消息 第十一步:右键运行mqtt.py,easyiot就玩起来拉 按下按键A,easyiot接收到了buttonA,按下按键B,easyiot接收到了buttonB。由于我们同时订阅了这个Topic,接收到的信息会下发给掌控板,输入消息,点击发送,可以从网页给掌控板发送消息    |
|
初学者求助大神:为什么出现以下错误?Traceback (most recent call last): File "<string>", line 37, in button_a_callback File "umqtt/simple.py", line 109, in publish TypeError: object with buffer protocol required Traceback (most recent call last): File "<string>", line 40, in button_b_callback File "umqtt/simple.py", line 109, in publish TypeError: object with buffer protocol required |



© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 学习就是要高手带。
学习就是要高手带。







