|
3305| 2
|
[创客活动] 蘑菇云创客成员之2019RCJ国际青少年机器人赛 |
|
蘑菇云创客成员之2019RCJ国际青少年机器人赛 2018年的年底,我们在DUDU老师的带领下开始了2019RCJ国际青少年机器人赛中国选拔赛的准备。 我们的队员来自不同的学校,不同的年龄,最大17岁,最小10岁,大家集中在上海蘑菇云创客空间 开始搞事情啦。:P 先讲讲我们的作品第1版的方案,那是个关于海洋动物螃蟹的主题,我们把机器人设计成螃蟹,螃蟹 的足用齿轮连动,不多写,上图吧!   螃蟹机器人----齿轮连动的螃蟹(crab)设计 A) 内部结构设计 一:齿轮可以安装在轴承外部,由轴承带动进行传动,齿轮在转动的时候同时带动其他齿轮的转动,轴承与齿轮二者是缺一不可的。 二:齿轮主要提供一个相互的咬合力与扭矩,而轴承主要是提供一个传动功能。齿轮传动需要安装在轴上,而轴承是是为轴提供支撑的构件,有了轴承的支撑更容易使轴及轴上构件有比较准确的运转精度,轴承滚动体可以减少轴承与轴的摩擦。 三:轴承属于易损件,损坏后可以进行更换和维护,这样可以减少轴承的磨损。 制作上的难点是齿轮之间的啮合空隙需要反复试验。调试过程中硬件与软件的配合非常重要。 B) 设计 选择怎样的输出模块也非常重要,步进电机需要4个数字口,舵机只需要1个数字口 C) 程序设计: 采用了模块化设计思路,分别调试每个功能模块 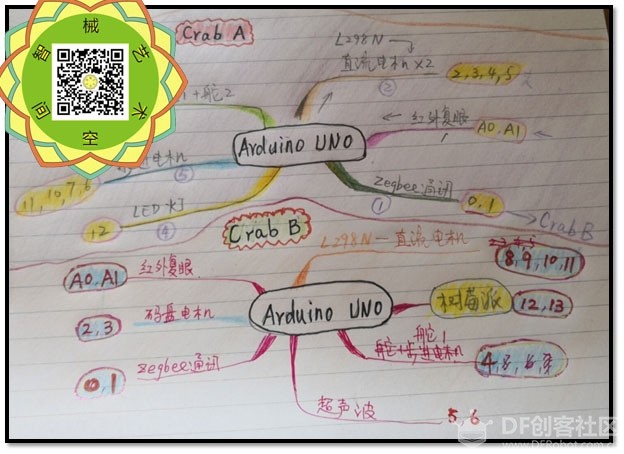 如果你也想参加,请扫码联系我! |
|
关于齿轮的设计 在齿轮设计过程中有以下几个关键点需要注意: 1.齿轮啮合条件 两齿轮的模数必须相等,两齿轮分度圆上的齿形角必须相等。两齿轮法面模数相等,齿形角相等,螺旋角相等且螺旋方向相反。两齿轮的大端模数和齿形角分别相等。 2. 齿轮啮合间隙 一对齿轮装配后,齿侧间隙是固定值。标准直齿圆柱齿轮,是无侧隙啮合的,齿侧间隙为0;齿侧间隙等于一个齿轮节圆齿槽宽减另一个齿轮节圆齿厚的差值。实际齿轮啮合是有侧隙的,通过控制齿厚(齿厚减薄)保证侧隙;根据使用条件(载荷,等)、使用环境(油温,等)。 3.齿轮的齿边变成圆弧 4.大齿轮与小齿轮啮合,小齿轮的齿比大齿轮小一点,通过观察乐高的齿轮可以得到这个结论. A)螃蟹机械结构的改进. 改进后这个齿轮的中心安装舵机 原来舵机安装在这个齿轮 改进了安装位置,这样齿轮的传动更加均匀,齿轮转动的时间基本一致,对舵机的扭力要求会减小. B) 螃蟹车底盘轮子的排列分布 编程控制舵机带动8齿轮转,跟上节奏 舵机齿轮程序 子函数foot() 流程图: 2个超声波模块同时放置, 程序很容易,关键是要避开回波干扰 void csb(){ ////////////////1号超声波//////////////////////////////////// digitalWrite(Tr1, LOW); //低高低电平发一个短时间脉冲去TrigPin delayMicroseconds(2); // delayMicroseconds在更小的时间内延时准确 digitalWrite(Tr1, HIGH); delayMicroseconds(10); digitalWrite(Tr1, LOW); //通过这里控制超声波的发射 cm1 = pulseIn(Ec1, HIGH) / 58.0; //将回波时间换算成cm ////////////////2号超声波//////////////////////////////////// digitalWrite(Tr2, LOW); delayMicroseconds(2); // delayMicroseconds在更小的时间内延时准确 digitalWrite(Tr2, HIGH); delayMicroseconds(10); digitalWrite(Tr2, LOW); cm2 = pulseIn(Ec2, HIGH) / 58.0; Serial.print(cm1); Serial.print("cm1"); Serial.println(); Serial.print(cm2); Serial.print("cm2"); Serial.println(); } void trackA() { forward(); csb(); if( cm1 <50) { stopped();delay(100); right(); delay(200); } else if(cm2 <50) { stopped();delay(100); left(); delay(200); } |
|
螃蟹B 硬件接口 // CrabB ZIGBEE(通讯开关接收A信号) 0,1 motor1(移动小车)8,9,10,11 舵机(齿轮8足)13 //传感器 超声波1(跟踪2,3 )超声波2(跟踪4,5 ) 树莓派3 + HC-SR04超声波测距模块 HC-SR04 介绍HC-SR04 模块可以测量 3cm - 4m 的距离,精确度可以达到 3mm。这个模块包括 超声波发射器、超声波接收器和控制电路三部分。有4 个引脚。 接线方式4 个引脚由 2 个电源引脚(Vcc 、GND)和 2 个控制引脚(Trig、Echo)组成。Vcc 和 Gnd 接5v DC 电源,但不推荐用独立电源给它供电,应使用树莓派或单片机的 GPIO 口输出 5v 和 Gnd 给它供电。不然会影响这个模块的运行。 Trig 引脚用来接收来自树莓派的控制信号。接任意GPIO 口。 Echo 引脚用来发送测距结果给树莓派。接任意 GPIO口。 (注意 Echo 返回的是 5v信号,而树莓派的 GPIO 接收超过 3.3v 的信号可能会被烧毁,因此需要加一个分压电路) HC-SR04 的测距过程 1. 树莓派向 Trig 脚发送一个持续 10us 的脉冲信号。 2. HC-SR04 接收到树莓派发送的脉冲信号,开始发送超声波(start sending ultrasoun),并把 Echo置为高电平。 然后准备接收返回的超声波。 3. 当 HC-SR04 接收到返回的超声波 (receive returned ultrasound) 时,把 Echo 置为低电平。 从上述过程可以看出, Echo 高电平持续的时间就是超声波从发射到返回所经过的时间间隔 ~ 接线跟前文所说的一样。 GPIO 2 脚接 Trig , GPIO 3 脚接Echo 。树莓派的 +5v 和 Gnd 与 HC-SR04 的 Vcc 和 Gnd相连。还有一个分压电路,一端接 Echo ,另一端接 Gnd。 1k 和 2k 电阻组成了一个分压电路,使 GPIO 3 脚的电压降到了 3.3v 左右。 python 程序 2 脚连 Trig ,设为输出模式; 3 脚连 Echo,设为输入模式。 然后向Trig 引脚输入10us 的脉冲: time.sleep() 接收的参数单位为 s ,于是把10 us 转换为0.00001 s 。 接收到这个脉冲后,HC-SR04发射出超声波,同时把Echo 置为高电平。在发射之前,Echo一直为低电平。 据此编写程序,记录超声波发射时的时间。 然后记录超声波返回时的时间。 这样就获得了我们需要的数据pulse_start 和 pulse_end ,可以算出距离了~ 测得距离(单位:m) = (pulse_end - pulse_start) * 声波速度 / 2 测得距离(单位:m) = (pulse_end - pulse_start) * 声波速度 / 2 声波速度取 343m/s 。然后再把测得的距离转换为 cm。 测得距离(单位:cm) = (pulse_end - pulse_start) * 声波速度 / 2 * 100 = (pulse_end - pulse_start) *17150
 STM32 F103T8U6 数字指南针 STM32 F103T8U6 数字指南针
|



© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






