|
4557| 3
|
DIY一个会走路的机器人 |
|
粉色的脚丫子,小小的脑袋,简单的构造。就是它了。 这个项目的原作者是:randaofo 原文链接:https://www.instructables.com/id/Simple-Walker-Robot/ 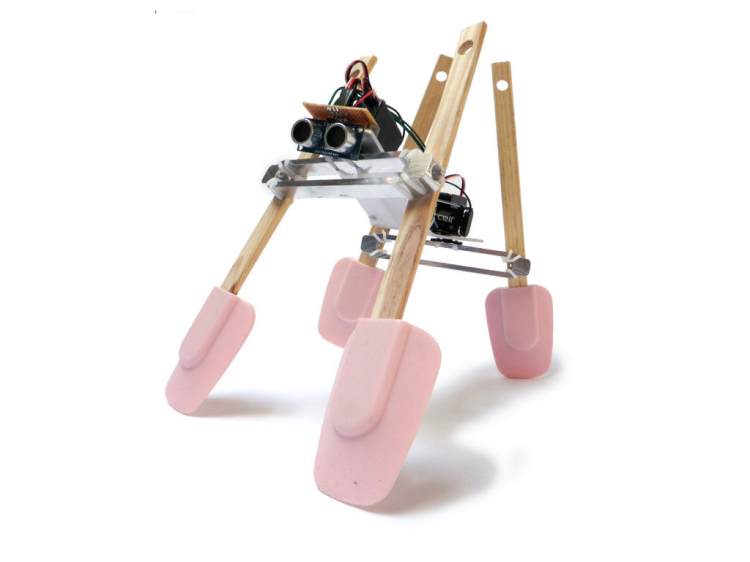   建造一个简单的步行机器人真的很容易。这个机器人基本上是由一些家用物品和一些简单的电子产品制成,你可以在Radioshack这个网站上很轻松的找到需要的电子产品。事实上,这个机器人是使用橡胶绑在一起的,这会让它的构建在进行任何的改进时非常容易。如果你对它的机构有任何的改进,只需要把橡胶皮筋解下来,然后确认好位置,再绑上就可以了,就是这么简单。  这个走路机器人的“大脑”也很容易修改,因为它是基于Arduino开发板。所以可以很方便的进行编程和更改代码,并且很简单。即使没有编程经验的人通常也可以很好的编程。 第一步:去找到需要的材料 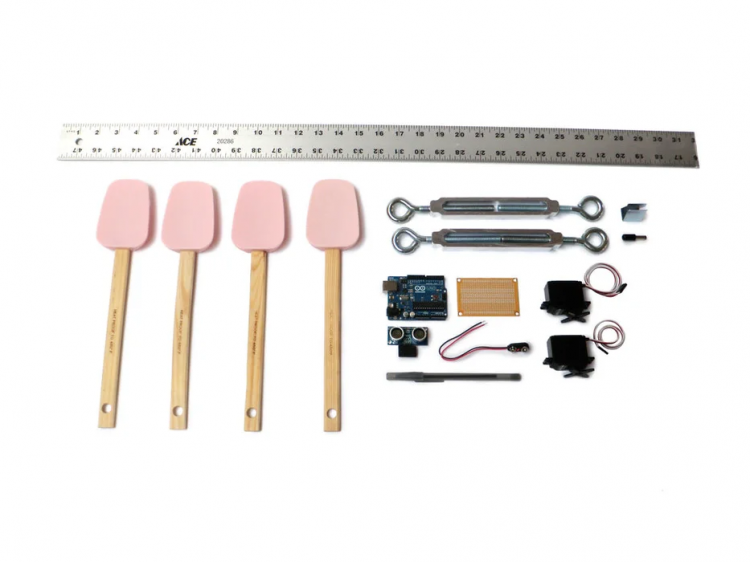 第2步:锯  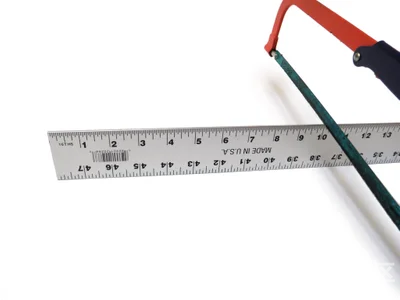  把一个20厘米的铝制尺子。 用钢锯锯成两个10厘米。 第3步:弯 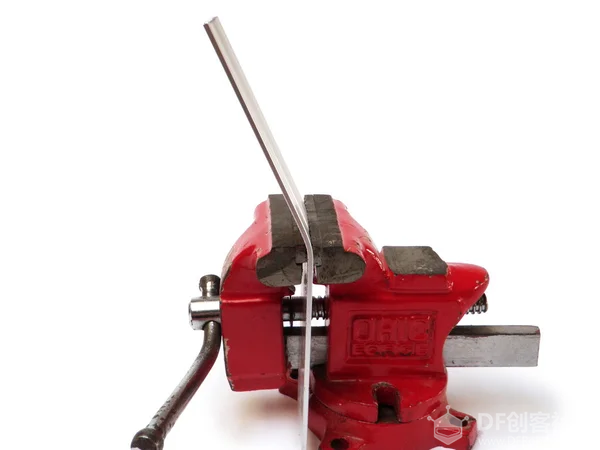  把尺子要弯曲的部分夹在台钳上,把五厘米的地方露出来。 弄弯它!!!!(约30度)。 不管你的操作过程是什么,其实到了最后的时候,只要达到的效果是一样的就行。 第4步:分开      拿起你的螺丝扣,取下所有的孔眼。 将它们放在一边用于其他项目。 第5步:钻孔    把每个伺服器的每个臂上的第二个孔加宽。 第6步:标记并钻取    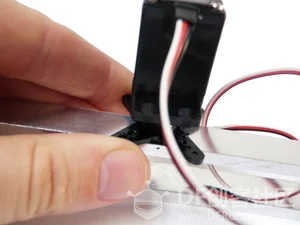    将螺丝扣放在边缘。在其中一个螺丝扣上测量3“。在此处做一个标记。在第二个螺丝扣上重复。 将伺服喇叭放在螺丝扣上的3”中心点。 将喇叭定位成使得“V”垂直于螺丝扣的长度。默认情况下,这应该定位两个指向螺丝扣每侧的“V”形状。在这些“V”形状的每个谷中做标记。 最后,用1/8“钻头钻这两个标记。 第7步:标记    画一个居中的标记,怎么画看图吧,我有点形容不出来。 第8步:钻     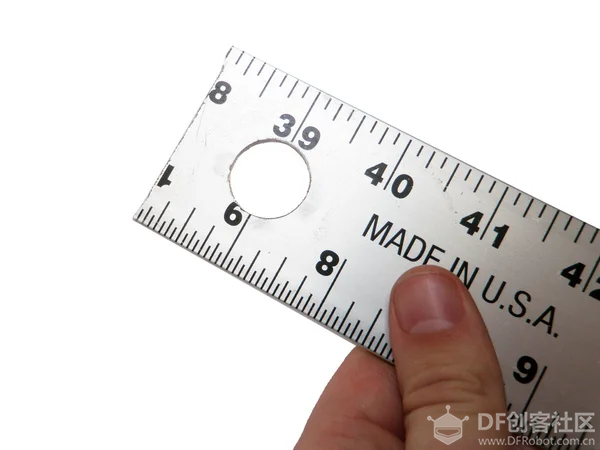 用3/4“钻头钻两个标记。 第9步:去除 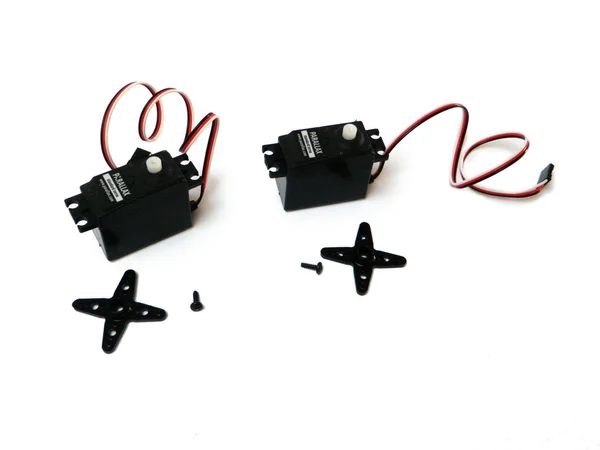  拧下固定螺钉,从伺服器上拆下伺服喇叭。 第10步:再次标记  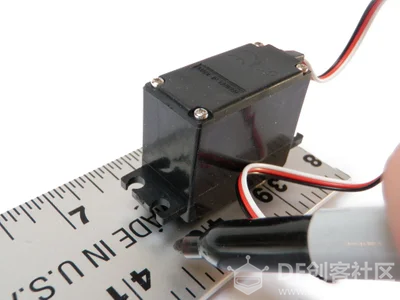 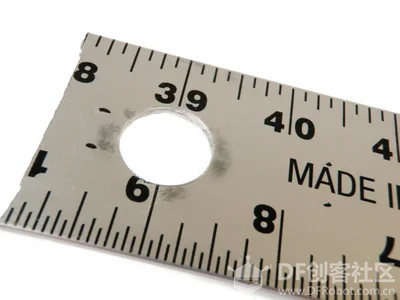 将伺服轴对准3/4“孔中的一个。使用伺服的安装孔在标尺上做4个标记。 将伺服器旋转180度,然后在另一侧重复。 第11步:继续钻孔   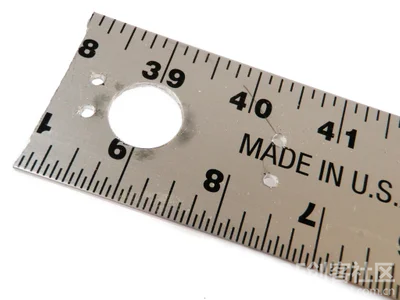 使用1/8“钻头给刚刚标记的点打孔。 第12步:安装 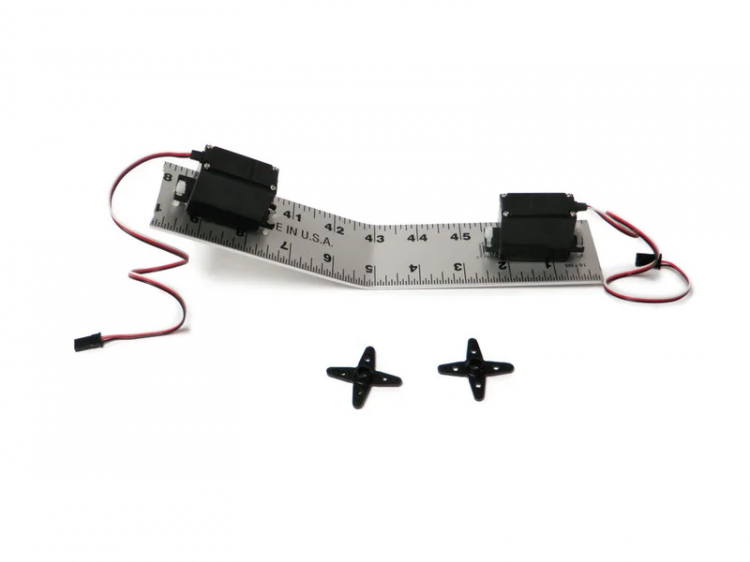 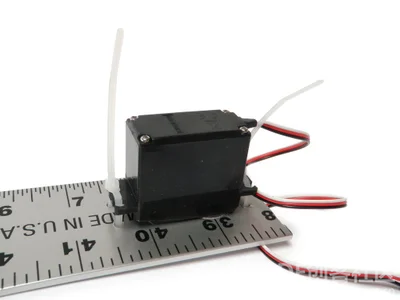 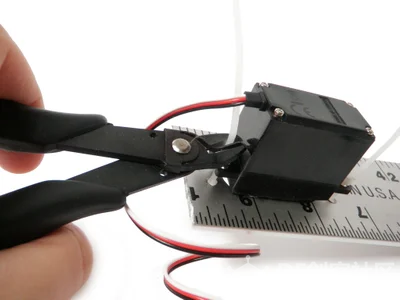 使用您刚刚钻过的安装孔将伺服器系到标尺上。 把多余的部分剪掉。 第13步:重新连接    第14步:标记并钻一点  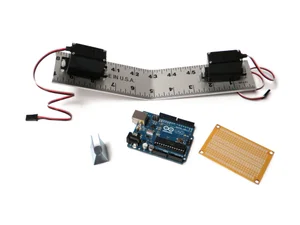    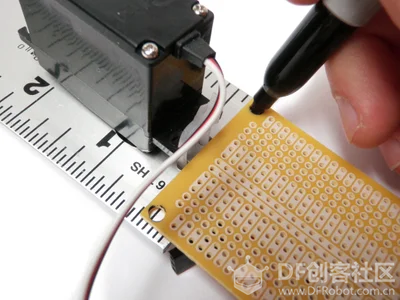 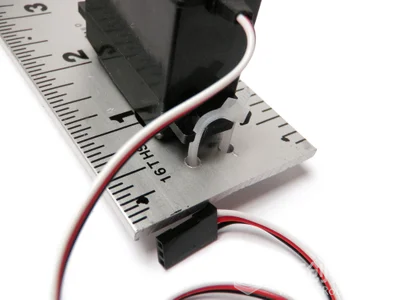 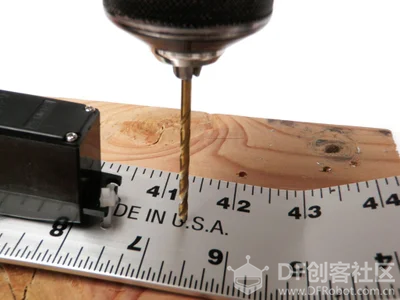   第15步:插入    从里到外,在螺丝扣中钻出的每个孔中插入扎带。 第16步:附加    将一个螺丝扣置于伺服喇叭顶部,并垂直于标尺。扎带将螺丝扣牢固地固定到位,然后修剪掉任何多余的扎带。 第17步:安装孔   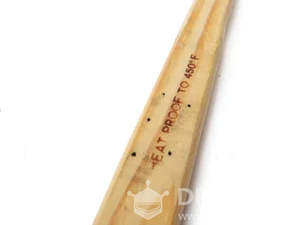    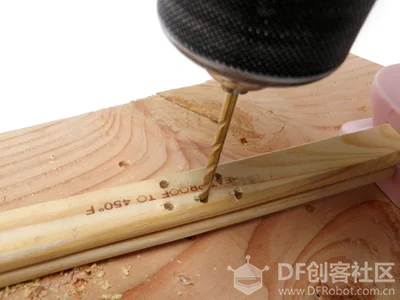 将刮刀的手柄定位在螺丝扣的大约一半处,使得这种螺丝扣垂直相交。接下来,将刮刀略微向外旋转(约10至25度)。 在螺丝扣的手柄上的螺丝刀的所有侧面上做多个标记,以指示用于拉链的钻孔到螺丝扣。 用1/8“钻头钻出你刚刚制作的标记。 将刮刀倒置,将另一把刮刀正面朝上放置。将它们对齐,使它们高度匹配。 使用第一个一组钻孔作为导向,在另一个刮刀中钻出另一组孔。这应该最终成为第一个镜像(即倒置,但在其他方面相同)。 第18步:前腿     使用刚钻过的孔,将刮刀拉紧到最靠近钻孔的螺丝扣上,以便安装PCB。 为了获得最佳效果,请确保它们在位置和高度上大致相互映射。 这两把刮刀将作为前腿。 第19步:后腿         重复前腿的过程以制作后腿。 请注意,这个机器人的后腿略短于前腿。但是,这不是一个严格的规定。试验并看看哪些适合您。 第20步:间隔物    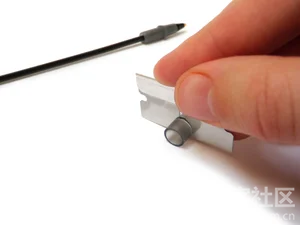 拆开圆珠笔。将笔的管子切成1/4“的部分。这些将用作安装部件的垫片 第21步:修剪   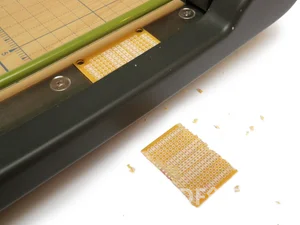  使用切纸机或剪刀,将原型板修剪至约1英寸。 步骤22:9V适配器    拧下M型插头并将外壳滑到9V连接器导线上,这样您以后可以将它拧回到一起(焊接后)。 将红线焊接到中央端子,将黑线焊接到插头的外部端子。 拧回插头盖。 步骤23:传感器板 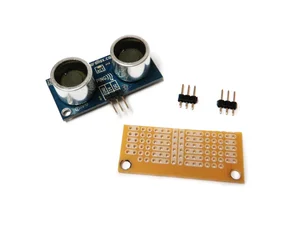 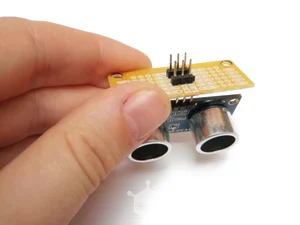 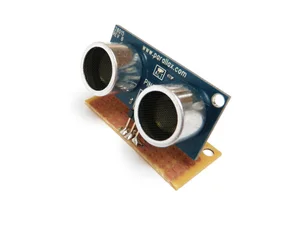 将传感器的接地导线放入沿导板长度方向移动的长导电导轨之一,并将电源导线放在另一个导线中。信号引线应位于跨越3个孔的较小导电轨之一中。 将传感器以一个小角度焊接到位,这样如果您将电路板平行于地面,它似乎会顺时针旋转约45度。 安装两个3针公头,使每一个都有一个焊接到接地轨的引脚,一个引脚焊接到电源轨上。 第24步:电线 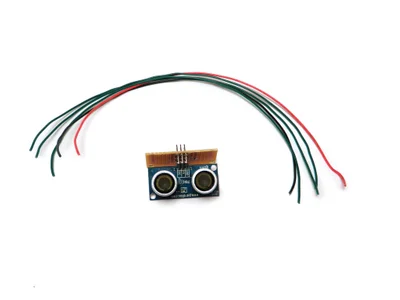  红线焊接到电源上。 黑色导线焊接地。 绿线焊接到Ping的信号引脚所连接的端子上。 绿线焊接到未连接到电源或接地连接的剩余插头引脚。 第25步:编程  [mw_shl_code=applescript,true] /* Simple Walker Robot by Randy Sarafan This code is for controlling a simple quadruped robot and having it respond to obstacles that approach. For more information visit the project page: https://www.instructables.com/id/Simple-Walker-Robot/ This code is based on both the Arduino Sweep example by BARRAGAN and the Arduino Ping example by Tome Igoe */ #include <Servo.h> Servo myservo; // create servo object to control a servo // a maximum of eight servo objects can be created Servo myservo1; // create a second servo object to control a servo int pos = 80; // variable to store the servo position for rear legs //changing this value changes the default position of the rear legs int pos1 = 70; // variable to store the servo position for front legs //changing this value changes the default position of the front legs //determines the rate at which the legs move int rate = 1000; // this constant won't change. It's the pin number // of the sensor's output: const int pingPin = 7; void setup() { myservo.attach(9); // attaches the servo on pin 9 to the servo object myservo1.attach(10); // attaches the servo on pin 10 to the servo object myservo.write(pos); // tell servo to go to position in variable 'pos' - sets center axis myservo1.write(pos1); // tell servo to go to position in variable 'pos' - sets center axis delay(5000); } void loop() { long duration, inches, cm; // The PING))) is triggered by a HIGH pulse of 2 or more microseconds. // Give a short LOW pulse beforehand to ensure a clean HIGH pulse: pinMode(pingPin, OUTPUT); digitalWrite(pingPin, LOW); delayMicroseconds(2); digitalWrite(pingPin, HIGH); delayMicroseconds(5); digitalWrite(pingPin, LOW); // The same pin is used to read the signal from the PING))): a HIGH // pulse whose duration is the time (in microseconds) from the sending // of the ping to the reception of its echo off of an object. pinMode(pingPin, INPUT); duration = pulseIn(pingPin, HIGH); // convert the time into a distance inches = microsecondsToInches(duration); //if something is closer than a foot, back away if(inches <= 12){ backward(); } //if nothing is closer than a foot, go forwards if(inches > 12){ forward(); } } //function for going forwards void forward(){ myservo.write(pos + 20); // tell servo to go to position in variable 'pos' myservo1.write(pos1 - 20); // tell servo to go to position in variable 'pos' delay(rate); myservo.write(pos - 20); // tell servo to go to position in variable 'pos' myservo1.write(pos1 + 20); // tell servo to go to position in variable 'pos' delay(rate); } //function for backing away void backward(){ myservo.write(pos + 25); // tell servo to go to position in variable 'pos' myservo1.write(pos1 + 50); // tell servo to go to position in variable 'pos' delay(rate); myservo.write(pos - 25); // tell servo to go to position in variable 'pos' myservo1.write(pos1 - 30); // tell servo to go to position in variable 'pos' delay(rate); } long microsecondsToInches(long microseconds) { // According to Parallax's datasheet for the PING))), there are // 73.746 microseconds per inch (i.e. sound travels at 1130 feet per // second). This gives the distance travelled by the ping, outbound // and return, so we divide by 2 to get the distance of the obstacle. // See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf return microseconds / 74 / 2; }[/mw_shl_code] 第26步:传感器 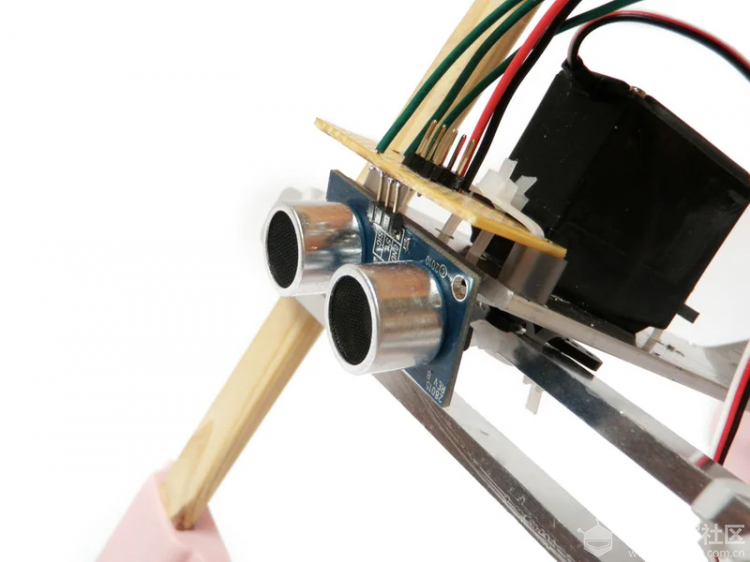 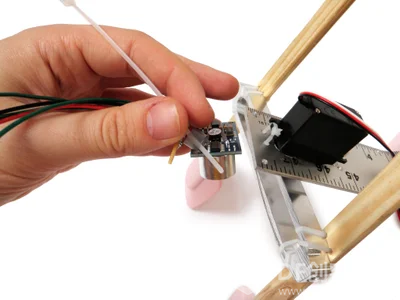  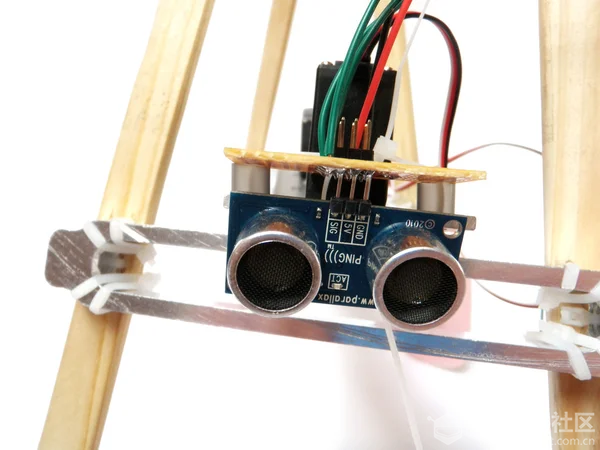 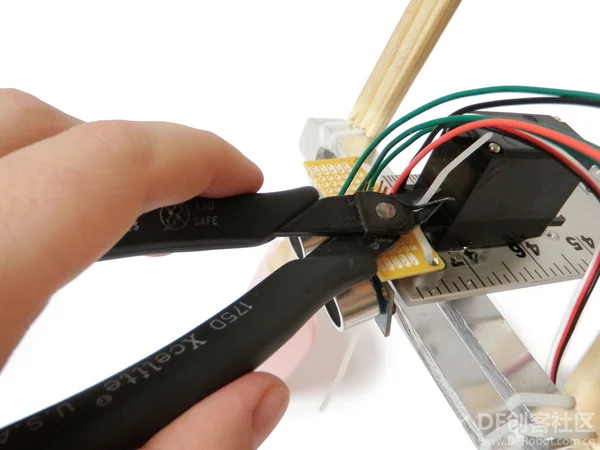 在每个PCB安装孔和PCB之间放置一个垫片。 用扎带绑牢。如果传感器没有与地面保持水平,请轻轻弯曲。 第27步:Arduino 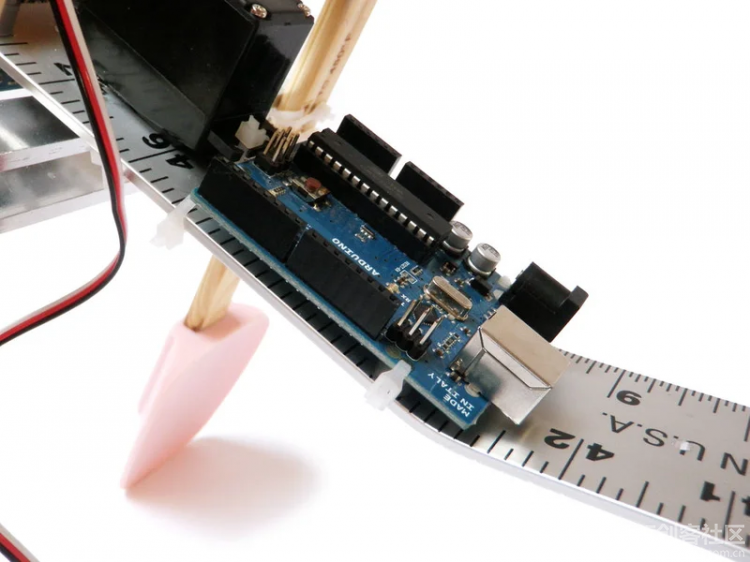 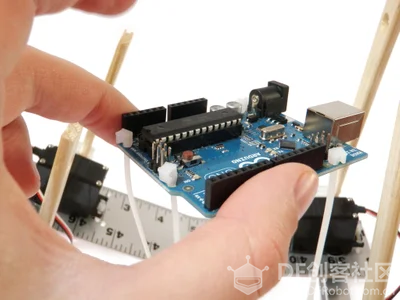 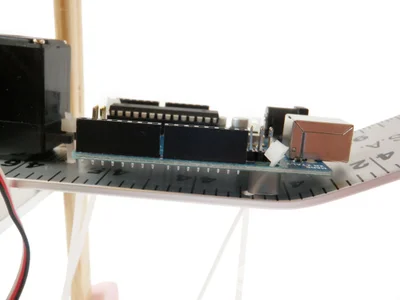 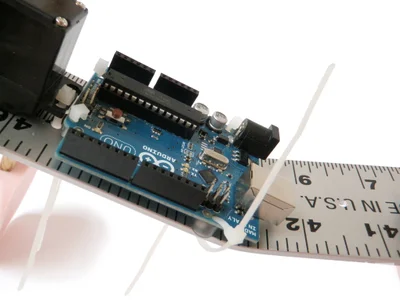 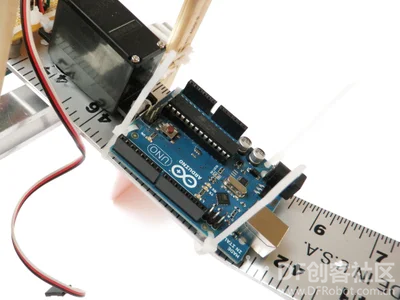  在Arduino和标尺上的每个安装孔之间放置一个垫片。也用扎带绑好。 第28步:附加 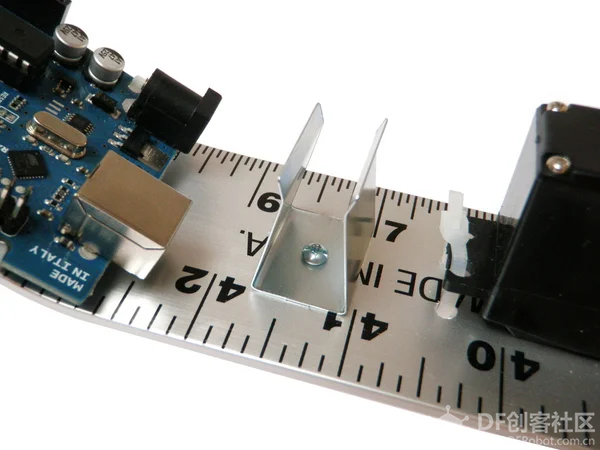 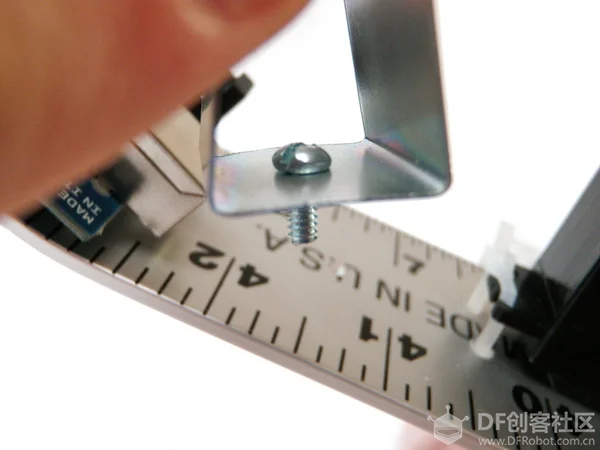 使用4-40螺母和螺栓将9V电池座固定到其安装孔中。 第29步:插头 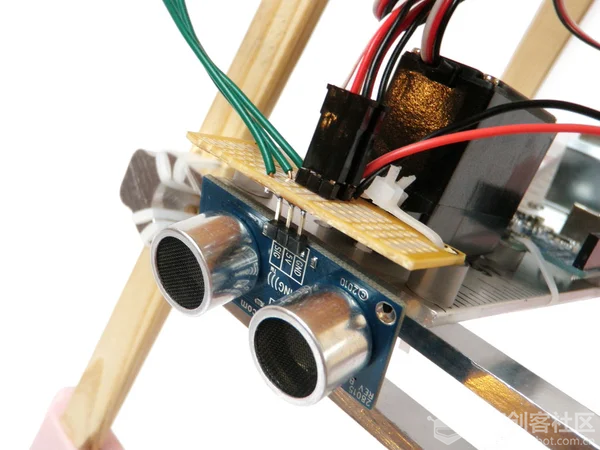 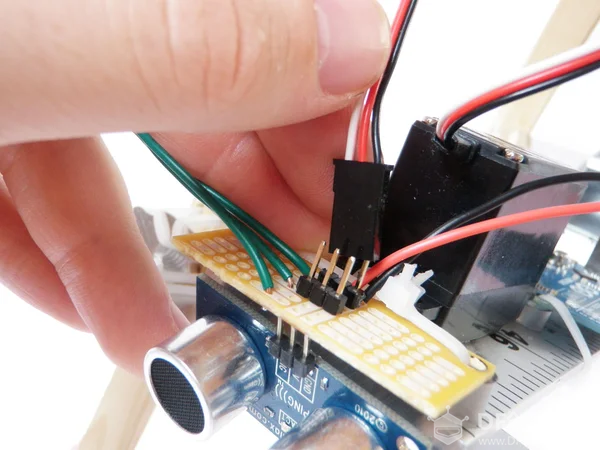 将伺服母插座插入PCB上的公头插头,确保黑色与地面对齐,红色与电源对齐,白色与绿色信号线对齐。 第30步:连线 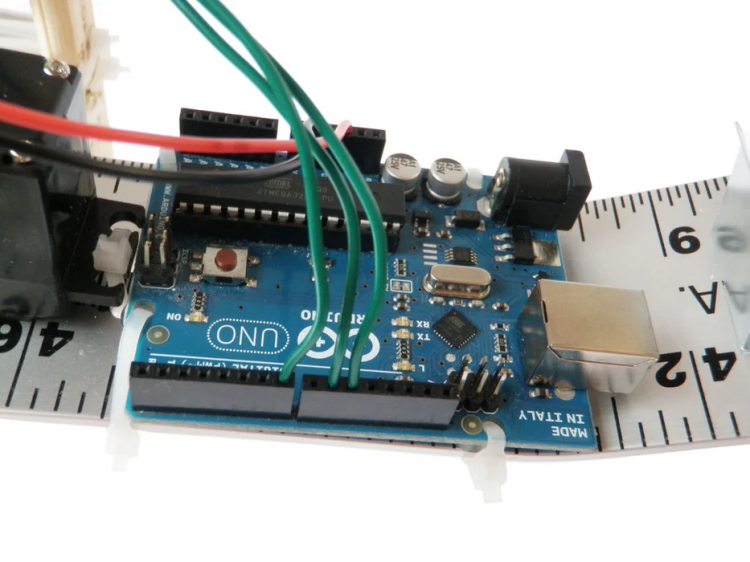 将红线从PCB插入Arduino 5V插座。 将黑色线从PCB插入Arduino接地插座。 将Ping传感器的绿线插入数字引脚插座7. 将绿色线从前伺服插入数字引脚插座9. 将后部伺服的绿线插入数字引脚10的插座。 第31步:电源 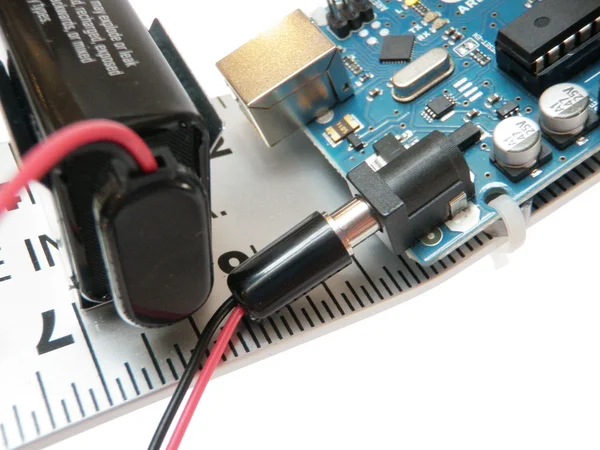 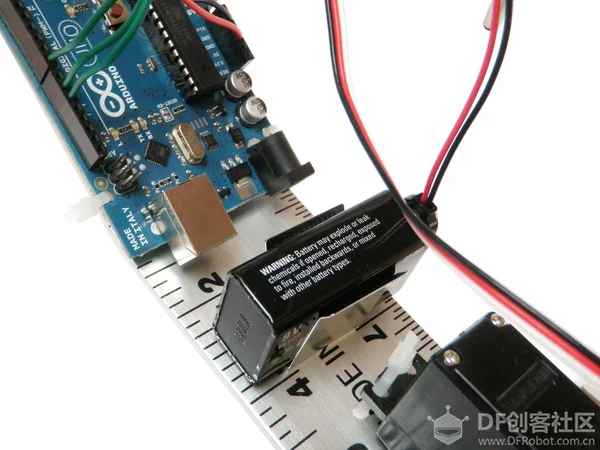 将电池连接到Arduino,将其固定在电池座中,这样就可以了。 |



© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






