|
7300| 1
|
[ESP32系列教程] ESP32 Arduino:获取FreeRTOS任务优先级 |

|
简 介 在本教程中,我们将使用一个函数来获取setup函数、主循环以及一个新建任务的优先级。 代 码 本教程代码非常简单。和以前一样,在setup函数中首先要打开一个串行连接。 然后,我们将获取setup函数的优先级。为此,只需调用uxTaskPriorityGet 函数即可。该函数的输入参数是我们想要获取优先级的任务的句柄,而函数返回值就是这个任务的优先级数值[1]。如果我们将输入参数设为NULL,那么就会得到主调任务的优先级[1]。 我们就想得到setup函数的优先级,所以我们将使用NULL参数来进行函数调用,如下所示。 [mw_shl_code=applescript,true]Serial.begin(112500); delay(1000); Serial.print("Setup: priority = "); Serial.println(uxTaskPriorityGet(NULL)); [/mw_shl_code] 接下来,声明一个TaskHandle_t类型的变量,用于存储将要新建的任务的句柄。 [mw_shl_code=applescript,true]TaskHandle_t myTask;[/mw_shl_code] 然后,新建一个任务。任务的具体实现稍后再说。我们目前关注的重要参数是这个任务的优先级(赋值为12)和句柄(赋值为先前所声明变量的地址)。这样就可以将这个任务的句柄保存起来,以备稍后获取其优先级。 创建任务的相关代码如下所示。如果需要创建任务有关的更多详情,请参阅此前的这篇帖子:ESP32 Arduino:创建FreeRTOS任务 。 [mw_shl_code=applescript,true]xTaskCreate( genericTask, /* Task function. */ "genericTask", /* String with name of task. */ 10000, /* Stack size in words. */ NULL, /* Parameter passed as input of the task */ 12, /* Priority of the task. */ &myTask); /* Task handle. */[/mw_shl_code] 在setup函数最后,我们使用任务句柄作为uxTaskPriorityGet函数的参数,将新建任务的优先级打印出来。 [mw_shl_code=applescript,true]Serial.print("Setup: created Task priority = "); Serial.println(uxTaskPriorityGet(myTask));[/mw_shl_code] 然后,在主循环中,重复与setup函数相同的操作,以获取主循环函数的优先级。 [mw_shl_code=applescript,true]void loop() { Serial.print("Main Loop: priority = "); Serial.println(uxTaskPriorityGet(NULL)); delay(1000); } [/mw_shl_code] 最终代码如下所示,其中包括任务函数(只有一个延时,然后就被删除)。 [mw_shl_code=applescript,true]void setup() { Serial.begin(112500); delay(1000); Serial.print("Setup: priority = "); Serial.println(uxTaskPriorityGet(NULL)); TaskHandle_t myTask; xTaskCreate( genericTask, /* Task function. */ "genericTask", /* String with name of task. */ 10000, /* Stack size in words. */ NULL, /* Parameter passed as input of the task */ 12, /* Priority of the task. */ &myTask); /* Task handle. */ Serial.print("Setup: created Task priority = "); Serial.println(uxTaskPriorityGet(myTask)); } void loop() { Serial.print("Main Loop: priority = "); Serial.println(uxTaskPriorityGet(NULL)); delay(1000); } void genericTask( void * parameter ){ delay(20000); vTaskDelete(NULL); } [/mw_shl_code] 测试代码 使用Arduino IDE将代码上传并打开serial monitor,对代码进行测试。运行结果如图1所示,其中显示了setup函数、新建任务和主循环函数的优先级。 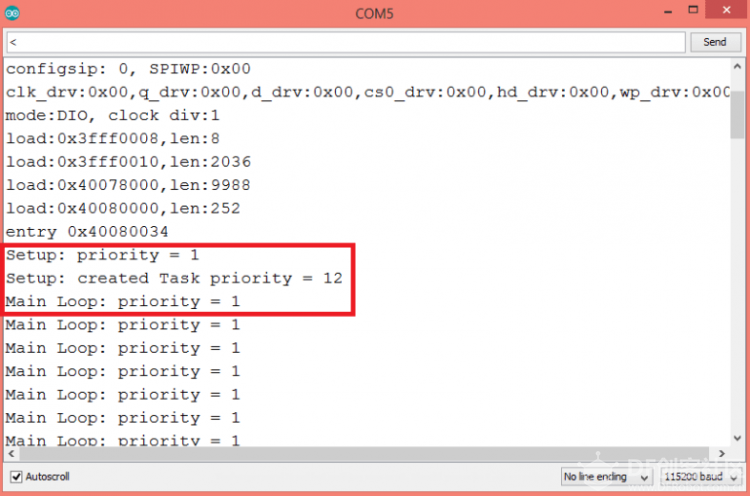 图1 - 获取任务优先级的代码运行结果。 注:本文作者是Nuno Santos,他是一位和蔼可亲的电子和计算机工程师,住在葡萄牙里斯本 (Lisbon)。 他写了很多有关ESP32、ESP8266的有用的教程和项目。 查看更多ESP32/ESP8266教程和项目,请点击 : ESP32教程汇总贴 英文版教程 : ESP32 tutorial |
 活跃会员
活跃会员
 牛X认证
牛X认证



© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







