|
3284| 1
|
Analog超声波测距传感器---超声波bit避障小车 |
 古人纪年通用天干地支,农历的正月开始为寅月, 按地支“子丑寅卯辰巳午未申酉戌亥”顺序推算, 第五个月正是“午月”,而午时又为“阳辰”,所以端午也叫“端阳”。 又因其月日数相同,人们又称端午节为“重五节”或“重午节”. 在这个特殊的日子,分享一个Analog超声波测距传感器---超声波bit避障小车。 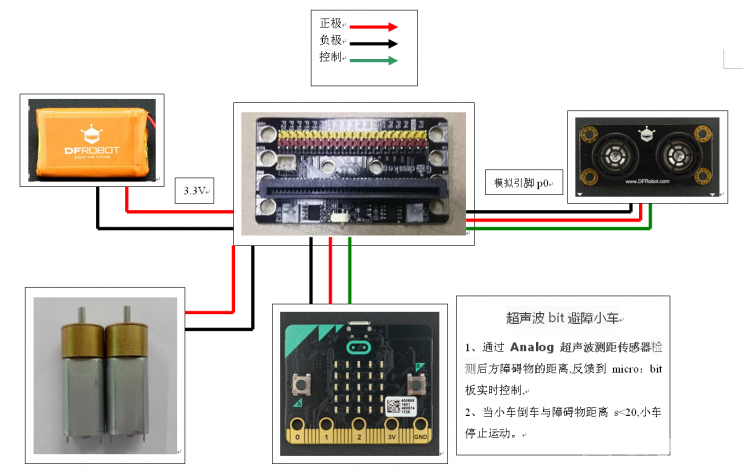 一、思路: 1、通过Analog超声波测距传感器检测后方障碍物的距离,反馈到micro:bit板实时控制, 2、当小车倒车与障碍物距离s<20,小车停止运动。 说明:1、计划利用掌控板radio功能和超声波,分享一个掌控小车倒车报警器项目,但是由于掌控板的模拟输入很差,在20cm以内就检测不到了。放弃掌控板,使用bit板 2、距离计算公式:距离(cm)=Vout(mV)*520/Vin(mV) 查阅资料https://www.myoschain.com/blog/124561957545050112可知,Vin(mV)=1023.0 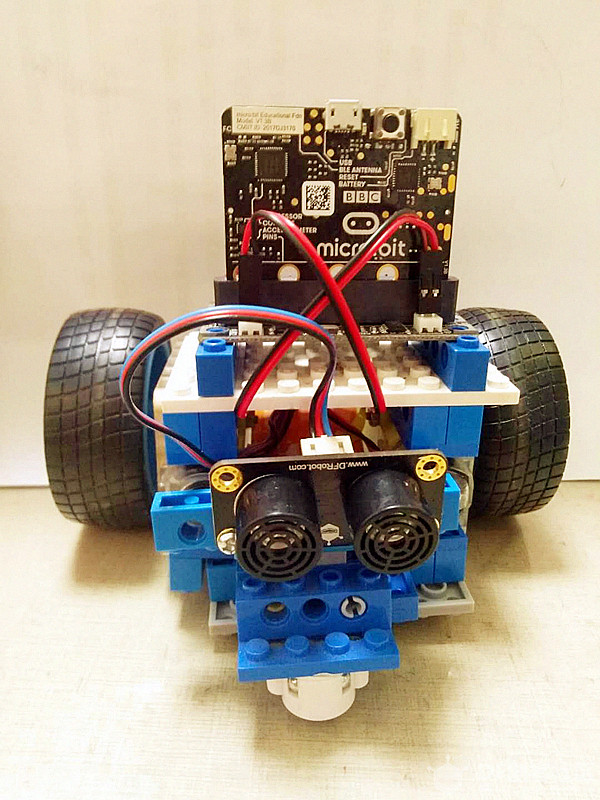 二、环境 1、硬件: microbit 编程板 购买地址:https://www.dfrobot.com.cn/goods-1434.html 扩展板兼容乐高购买地址: https://k.weidian.com/srQNA04m  2、软件:Mind+1.5.5 下载软件地址:http://mindplus.cc/index-chinese.html  三、认识goodmaker 掌控板扩展板, 3、扩展板P0 :接Analog超声波测距传感器
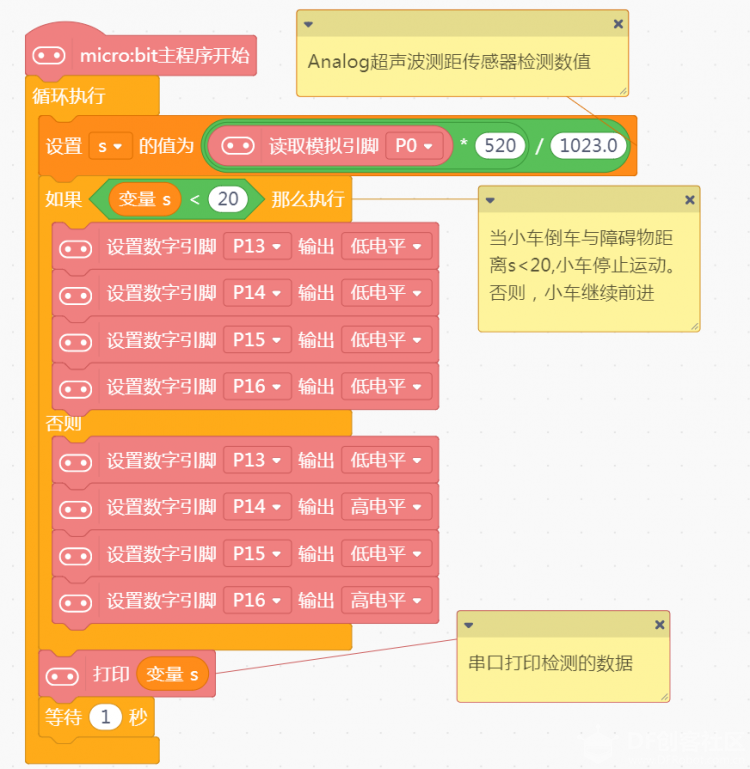
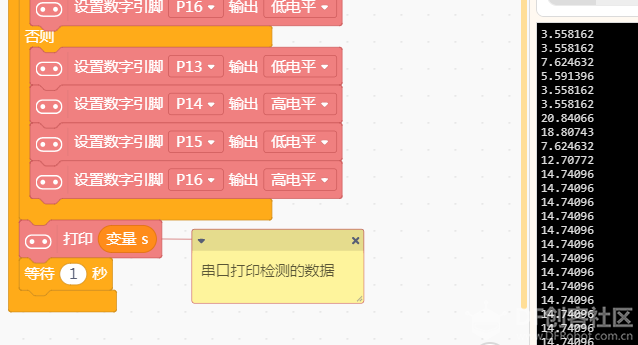
四、Mind+编程流程 1、切换到“上传模式”。 2、扩展选项,选中主控板, micro:bit”。 3、编写超声波bit避障小车控制程序 4、菜单“连接设备”,选择一个“COM18-micro:bit”,然后点击“上传到设备 五、程序编写
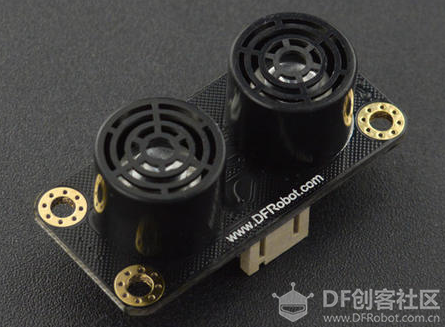
六、知识拓展 URM09是一款开放式双探头超声波测距传感器,它采用的是模拟电压输出方式,通过Gravity 3Pin模拟传感器线可以方便的与主板连接,兼容Arduino、树莓派等各种3.3V或5V逻辑电平的主控板。距离计算公式:距离(cm)=Vout(mV)*520/Vin(mV)
视频回放 产品购买链接:点击查看 |



© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 志“童”道合
志“童”道合






