|
8456| 1
|
[HACKxFDU] HACK x FDU 2017复旦大学创客马拉松 |
 11月3日至11月5日, HACKxFDU又在风和日丽的周末搞出事情来啦!这次的复旦大学创客马拉松现场聚集了400多位来自全国各地的大学生及部分高中生,一共产出了70个优秀项目。参赛的学生围绕人工智能、物联网、金融科技以及云服务方向,借助赞助商提供的API/SDK或硬件,进行新的技术应用产品或服务开发。作品涵盖网络应用、体感游戏、无人机应用、AR和VR等领域。下面就跟着DF君看看现场都脑洞出了哪些新鲜有趣的项目吧~ 识谱 您的食谱推荐专家  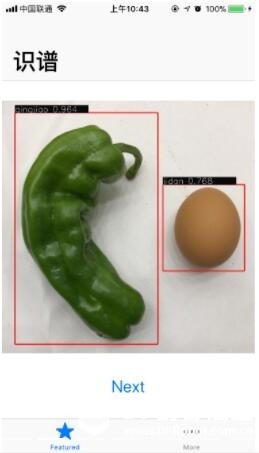 创意来源 时常在超市听见人叨叨不知吃啥,面对众多食材难以抉择的情况,或者见到冰箱里食物接近坏掉,却不知道怎么用一道菜解决掉所有食材。于是我们希望通过程序快速识别出食材并推荐健康食谱,帮助下用户做出更佳的选择。 技术说明 用强大的检测框架R-FCN对食材进行分类并检测识别出图片中包含的食材;编写爬虫根据食材为用户扒取食谱;作品使用了青云的GPU主机,IBM的GPU服务器以及NVIDIA的企业的GPU及CUDA加速运算; 使用指南 拿起手机,拍照OR选取一张图片上传,我们的程序将智能识别出图片中的食材,给您推荐最合适最营养最丰富的食谱(罗列菜名,图片,烹饪方法,原料等信息),让菜市口前的您不再犹豫,冰箱门前的您不再彷徨! 向大师学习  解决问题 通过VR以及Kinect组件,贴合式学习大师动作,打造高效的动作学习策略。解决人在学习他人动作的同时,无法及时感知自身的动作是否到位的问题。 技术说明 Object轨迹记录仪;3D骨骼分析建模还原;Kinect、unity、拟合算法;大师动作联网商店 Action Store;docker、青云数据库;Kinect SDK;Django web framework;语音识别、微软认知服务;websocket实时传输; 使用指南 1. 由熟练掌握特定动作(如投篮动作)的大师,在特定的设备前,通过定制的Object轨迹记录仪,以特殊的数据结构保存所有大师的动作帧。 2. 录制动作结束后,For-master application 自动上传该动作文件至云端。 3. 对于想要学习特殊动作的学生,可以在定制的云端Action Store里浏览并查看相关大师录制的动作。下载后即可进入学习阶段。 4. 通过观察大师模型的运动轨迹与学生自身当前的模型贴合,以3D可视化的形式提供给视觉观察。或依赖特殊的动作拟合度算法来实时监测学生动作是否到位。 Where R U 实时跟拍、在线直播平台  项目简介 通过人类自然语言的指导,指导摄像机器自动追踪,结合识别,定位,跟踪,调焦等摄影技术,用文字声音图片录像全方位多角度地展现赛场或者会场的精彩情况通过解说员的解说词,用语音识别和自然语言处理技术来确定对那个物体进行特写,并利用计算机视觉技术和硬件控制来定位识别追踪相关选手,进行自动跟踪拍摄,以求减少摄影师及后期剪辑的人力物力支出,提高效率。 使用说明 1. 预先训练:在MATLAB文件中预先指定CV对象,如人、动物或汽车、车牌等。预先提交IBM Watson语音识别关键字词。 2. 使用步骤: 1)运行py脚本,实时进行语音录取,上传IBM Watson和下载识别信息 2)将罗技C920摄像头的USB3.0、Arduino开发板的USB2.0与PC连接,连接好开发板DC电源,连接放置好舵机和摄像头 3)打开Arduino IDE,选择对应的Arduino开发板型号版本,打开Arduino的ino固件,编译下载到开发板上。下载完成后开发板会自动运行。 4)打开MATLAB脚本,并在MATLAB环境中运行。软件将直接打开罗技C920摄像头,并展现视频画面。 5)默认情况下为人像识别,识别成功时会出现方框,此时可以进行移动,摄像头会进行跟踪。语音中说出预先训练的关键词,如果符合判断规则,图像识别将会转换目标(如由人像识别转为车牌识别),摄像头将对更新后的判断对象进行识别跟踪。 音由心生 面部表情识别推荐音乐系统 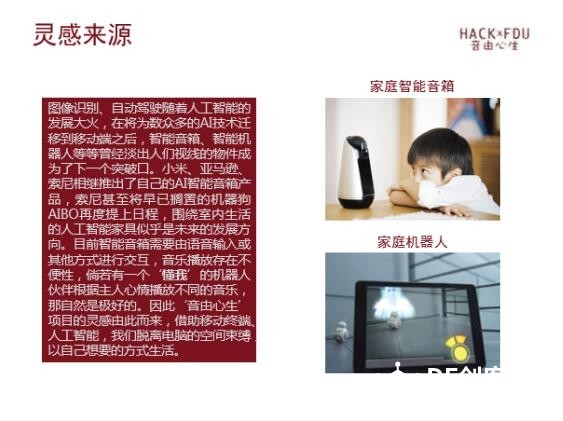  创意来源 目前智能音箱需要由语音输入或其他方式进行交互,音乐播放存在不便性,倘若有一个‘懂我’的机器人伙伴根据主人心情播放不同的音乐,那自然是极好的。因此‘音由心生’项目的灵感由此而来,借助移动终端、人工智能,我们脱离电脑的空间束缚,以自己想要的方式生活。 技术说明 基于CNN深度学习网络的视频流情感识别;基于IBM Watson Tony Analyzer的音乐情感分类;基于Python BeautifulSoup实现的NetEase音乐流/歌词扒取;使用SpringBoot搭建易于扩展的微服务化的服务器; 面部表情可以很好的反映出人的心情,而音乐又与心情息息相关,当人处于烦躁时,一首舒缓的音乐不仅可以放松心情,也可以给人带来美的享受。音由心生,你的独家定制音乐推荐系统,居家智能机器人的又一力作。 建筑设计VR体验器   创意来源 设计师提供方案时,常常需要提供多个方案供客户选择,并且向客户逐个解释方案的优缺点,但是这样并不直观,客户很难直接感知方案的优劣。用户通过和立体效果图的交互可以加快对设计效果图的了解,能够及时和设计师沟通,既可以减少设计师的设计周期和成本,又能满足客户需求。 技术说明 Autodesk Forge 平台。项目借助于 Autodesk Forge平台和其所含的View & Data技术,解决了各种模型格式化,模型轻量化,对超大模型的综合管理,客户端(甚至0插件)轻量化及使任何终端都支持的问题。 Web VR。项目借助于该技术提供了更逼真的、具有交互性的三维可视化环境,使用户更方便于对产品的观察和评估。 使用指南 1. 上传设计图:用户可以通过PC端或者移动端上传自己的设计图; 2. 网络端图片转化:服务器处理用户上传的设计图,转化为3D模型; 3. 用户访问:用户可以通过PC端或者移动端上的任意浏览器访问模型; 4. 视角转换:用户可以通过各种手段对3D模型进行浏览; 车联网应用 基于路况的交通路线优化 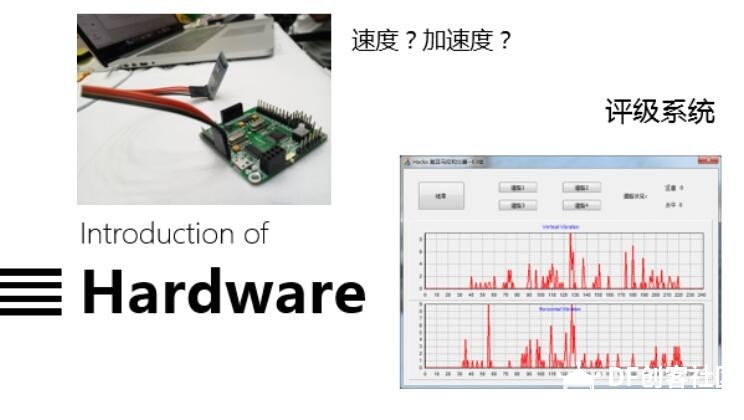 创意来源 GPS导航或许可以给你提供距离最短, 耗时最短的推荐路径, 然而GPS导航只能够提供位置信息,不能够将如路面颠簸,道路堵塞等道路状况纳入到路径推荐的考虑之中。我们的系统利用车联网依靠车辆的加速度传感器数据,利用IBM云服务器对大量用户的地理交通信息数据,提供考虑路况信息以及行驶舒适程度的人性化行车路线推荐服务。 项目说明 在常规最优化路径针对时间路线长度最优结果的基础上,通过获取每辆车行驶过程中的加速度信息(水平方向和竖直方向),将车辆行驶过程中的舒适程度(加速度变化较小)纳入考察范围。利用IBM Cloud来处理和实时维护每条路径的数据,并且提供查询任意起始点间的最佳路径(综合考虑所需时间和驾驶舒适度)。 小车硬件平台使用STM32F103RCT6为主控,与MPU6050六轴传感器进行IIC通信读取小车三轴加速度信息并给予相应评级。电脑UI界面使用MFC程序编程,通过蓝牙与小车HC-06进行串口通信,存储读取到的信息并实时显示在UI折线图上。 DSharing 运用区块链实现的租借(房)平台  在使用传统租借平台时,比如 Airbnb租房,用户与商家之间存在种种安全问题,导致我们无法信任这些平台来进行交易。因此,我们想要做一个更加安全安全的平台来保障这一些租借交易。DSharing的核心是区块链技术。区块链使得用户能够不将数据传给第三方直接进行交易。该平台使用基于网络的平台以方便不同的用户进行有效访问、进行交易。 使用说明 1. 用户通过浏览查询区块链得到的租房信息,选择合适的服务。 2. 选定房屋租赁服务之后,选择合适的金额,点选“租房”按钮,当前账户将执行智能合约,发送租金至房屋(House)地址中,同时房东应得到合适比例的定金。完成后用户得到该房屋锁(Lock)的所有权,房东不得随意操作锁。 3. 按照时间的推移,房屋存贮的租金不断被消耗,并发送至房东账户,当租金为零时触发智能合约,房屋锁的控制权移交房东,服务终止。 4. 如果提前退房,房屋剩余的租金将返回租户账户,服务终止。交易由智能合约执行,安全性由区块链匿名性,不可篡改,不可抵赖保证。类似的物联网服务可由该平台拓展支持,可拓展性强。 更多精彩项目可访问: https://www.hackx.org 推荐阅读 中美创客大赛作品系列: |



© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 牛X认证
牛X认证
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






