|
24686| 7
|
[入门] 【红外遥控数码管】基于Mind+ Ardunio入门教程15 |
|
数码管,常见的用来显示数字的,比如像计算器。在本实验之前我们先来了解一下数码管是如何工作的。数码管,其实也算是LED中的一种。数码管的每一段,都是一个独立的LED,通过数字引脚来控制相应段的亮灭就能达到显示数字的效果。下面让我们通过实验的方式来感受一下数码管的神奇之处吧! 所需元件 ■ 1× 八段数码管  ■ 8× 220欧电阻  硬件连接 按下图连线图连接,注意数码管各段所对应的引脚。右边引脚说明图上为什么画这么几个箭头呢?个人觉得,这样看起来更方便。可以给你作为参考。我们从上面一排看,红色箭头的方向,从右往左,b→a→f→g的顺序正好对应下面红色箭头逆时针顺序b→a→f→g。蓝色箭头也是表达的同样的意思。 我还特意在连接图上,对数码管所连接的引脚做了标示。这样就能更清楚的知道哪个引脚控制哪一段了。这8个电阻同样是起限流的作用。 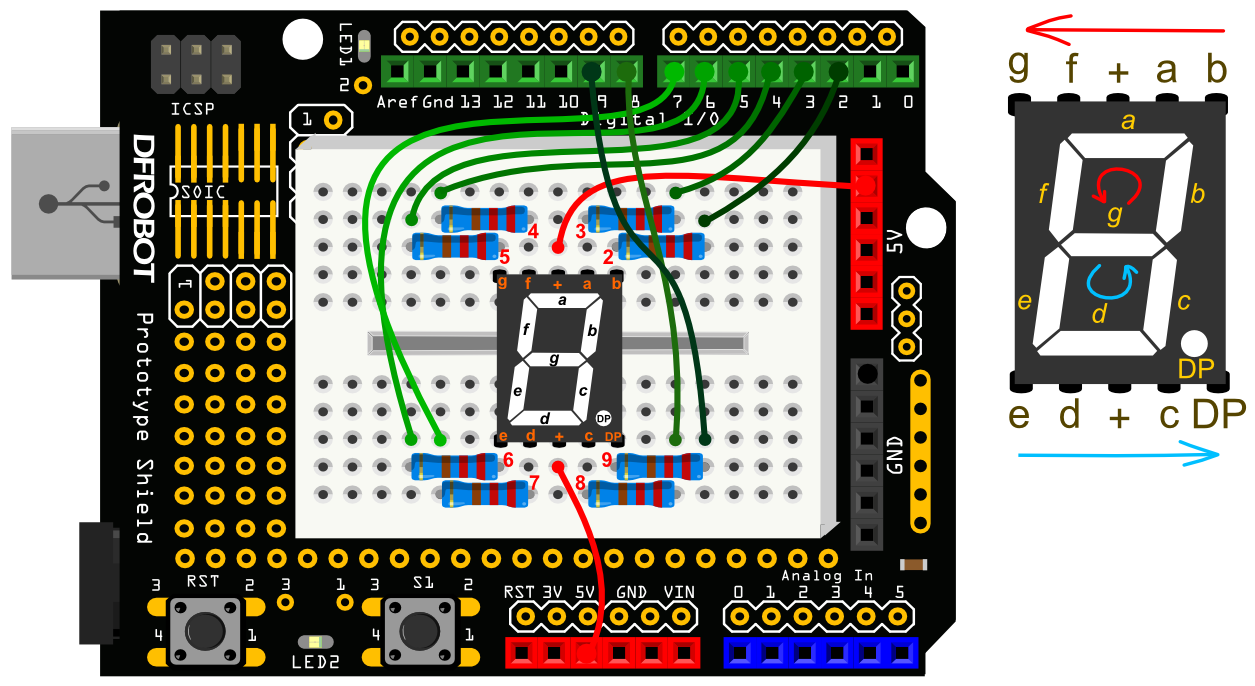 图 15-1数码管显示连线图 代码编程 样例代码15-1: [mw_shl_code=c,true]//项目15 – 数码管显示 void setup(){ for(int pin = 2 ; pin <= 9 ; pin++){ // 设置数字引脚2~9为输出模式 pinMode(pin, OUTPUT); digitalWrite(pin, HIGH); } } void loop() { // 显示数字0 int n0[8]={0,0,0,1,0,0,0,1}; //数字引脚2~9依次按数组n0[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n0[pin-2]); } delay(500); // 显示数字1 int n1[8]={0,1,1,1,1,1,0,1}; // 数字引脚2~9依次按数组n1[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n1[pin-2]); } delay(500); // 显示数字2 int n2[8]={0,0,1,0,0,0,1,1}; // 数字引脚2~9依次按数组n2[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n2[pin-2]); } delay(500); // 显示数字3 int n3[8]={0,0,1,0,1,0,0,1}; // 数字引脚2~9依次按数组n3[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n3[pin-2]); } delay(500); // 显示数字4 int n4[8]={0,1,0,0,1,1,0,1}; // 数字引脚2~9依次按数组n4[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n4[pin-2]); } delay(500); // 显示数字5 int n5[8]={1,0,0,0,1,0,0,1}; // 数字引脚2~9依次按数组n5[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n5[pin-2]); } delay(500); // 显示数字6 int n6[8]={1,0,0,0,0,0,0,1}; // 数字引脚2~9依次按数组n6[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n6[pin-2]); } delay(500); // 显示数字7 int n7[8]={0,0,1,1,1,1,0,1}; // 数字引脚2~9依次按数组n7[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n7[pin-2]); } delay(500); // 显示数字8 int n8[8]={0,0,0,0,0,0,0,1}; // 数字引脚2~9依次按数组n8[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n8[pin-2]); } delay(500); // 显示数字9 int n9[8]={0,0,0,0,1,1,0,1}; // 数字引脚2~9依次按数组n9[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n9[pin-2]); } delay(500); }[/mw_shl_code] 完成下载后,数码管就会循环显示0~9的数字。由于要看懂代码的话,首先需要了解数码管的构造,所以我们这回先说硬件部分。 硬件回顾 数码管 数码管其实就是一个前面介绍的LED的组合体,这个组合体包含8个led,所以也称之为八段数码管。说白了就八个灯。哪八段?不用多说了吧!a到g以及小数点DP。其实用法和前面说的LED也是一样的,每段都是一个发光二极管,分别用8个数字口来控制它们的亮灭,通过不同段的显示,就能组成0~9的数字。比如,我们让b、a、f、e、d、c亮起的话,就能显示一个数字“0”了。 下图15-2是引脚说明图,不陌生了吧!在前面硬件连接的时候,已经看到过一次了。 这里,b→a→f→g→e→d→c→DP分别连接到Arduino数字引脚2~9。  图15-2 引脚说明图 数码管的共阴共阳在使用上有什么区别 共阳数码管,它们公共端接5V,那在代码中,控制另一端的数字引脚为LOW,这样才能让数码管点亮。如果是共阴数码管,公共端接GND,在代码中中,控制另一端数字引脚为HIGH,才让数码管点亮。 所以,共阴共阳只是在代码上要稍作修改。我们这里选用的是共阳数码管。了解了硬件,我们来看看软件部分。 代码学习 硬件部分我们已经说过,数码管需要接到8个数字引脚,所以在一开始,需要定义8个数字引脚作为输出。这次我们用一个for循环来完成这8个数字引脚的设置。数码管b、a、f、g、e、d、c、DP分别和Arduino数字引脚2~9对应。 [mw_shl_code=c,true] for(int pin = 2 ; pin <= 9 ; pin++){ // 设置数字引脚2~9为输出模式 pinMode(pin, OUTPUT); digitalWrite(pin, HIGH); } [/mw_shl_code] 从引脚2开始,一直循环到引脚9,都设为OUTPUT模式,初始化为HIGH。前面说过,共阳的话,设置HIGH,不被点亮,所以开始先不点亮数码管。(当然,你一个一个引脚分开设置输出模式也是不会错的,只是会让代码显得很冗长。) 好了,到了主函数,要分别显示0~9的数字。是不是觉得代码大部分都是相似的。所以,我们只要看明白如何显示数字0,那整段代码就都迎刃而解了。 数组 [mw_shl_code=c,true]int n0[8]={0,0,0,1,0,0,0,1}; [/mw_shl_code] 这里我们要引入一个数组的概念。数组是一个变量的集合,可以通过索引号来找到数组中的元素。在我们的程序中,声明了一个int型的数组。并取名为n0。之后用8个数值来初始化这个数组。那如何获得数组中的元素呢?你只需要简单的指出这个元素的索引号。数组是从0开始索引的,这意味着数组中的第一个元素的索引号为0而不是1,因此数组中的8个元素的索引号是0~7。在这里元素4,对应索引号为3(n0[3]),值为1。元素8(索引号7,n0[7])的值为1。 声明中n0[8]的方括号中的8代表有8个元素。 定义完数组后,进入又一个for循环。 [mw_shl_code=c,true]for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n0[pin-2]); } [/mw_shl_code] 这个for循环是给2~9引脚写入状态值,也就是HIGH还是LOW,digitalWrite函数中写入HIGH的另一种形式就是写入“1”,LOW则可以写为“0”。我们通过数组索引的方式给2~9引脚赋值。 比如当pin=2,代入n0[pin-2]中,对应为n0[0],n0[0]意思是获得数组的第一个元素,为0。完成了引脚2置低(LOW)。我们前面说了,共阳的数码管,置低(LOW)的话,是被点亮,所以,b端被点亮了。循环到pin=3,a段被点亮,。循环到pin=4,f段被点亮,依次类推…… 整个循环过程如下: pin=2 à n0[0] =0 à digitalWrite(2,0) à b段点亮 pin=3 à n0[1] =0 à digitalWrite(3,0) à a段点亮 pin=4 à n0[2] =0 à digitalWrite(4,0) à f 段点亮 pin=5 à n0[3] =1 à digitalWrite(5,1) à g段不点亮 pin=6 à n0[4] =0 à digitalWrite(6,0) à e段点亮 pin=7 à n0[5] =0 à digitalWrite(7,0) à d段点亮 pin=8 à n0[6] =0 à digitalWrite(8,0) à c段点亮 pin=9 à n0[7] =1 à digitalWrite(9,1) à DP段不点亮 这样就完成了显示数字“0”了。同样用数组的方法显示数字1~9。自己动手画一下,哪几段亮,哪几段不亮就一目了然了。 如果代码1弄明白后,我们要教大家一种更简单的方法。 代码编程2 样例程序15-2 [mw_shl_code=c,true]//项目15 – 数码管数字显示 int number[10][8] = { {0,0,0,1,0,0,0,1}, //显示0 {0,1,1,1,1,1,0,1}, //显示1 {0,0,1,0,0,0,1,1}, //显示2 {0,0,1,0,1,0,0,1}, //显示3 {0,1,0,0,1,1,0,1}, //显示4 {1,0,0,0,1,0,0,1}, //显示5 {1,0,0,0,0,0,0,1}, //显示6 {0,0,1,1,1,1,0,1}, //显示7 {0,0,0,0,0,0,0,1}, //显示8 {0,0,0,0,1,1,0,1} //显示9 }; void numberShow(int i){ //该该函数用来显示数字 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin, number[pin - 2]); } } void setup(){ for(int pin = 2 ; pin <= 9 ; pin++){ // 设置数字引脚2~9为输出模式 pinMode(pin, OUTPUT); digitalWrite(pin, HIGH); } } void loop() { for(int j = 0; j <= 9 ; j++){ numberShow(j); //调用numberShow()函数,显示0~9 delay(500); } } [/mw_shl_code] 代码学习 对比一下代码1,能发现明显的区别在哪里了吗?代码1中,我们创建了10个一维数组,代码2只需要创建一个二维数组就全部搞定了。不要被什么一维、二维数组的名字给吓唬到,其实用法一样的。 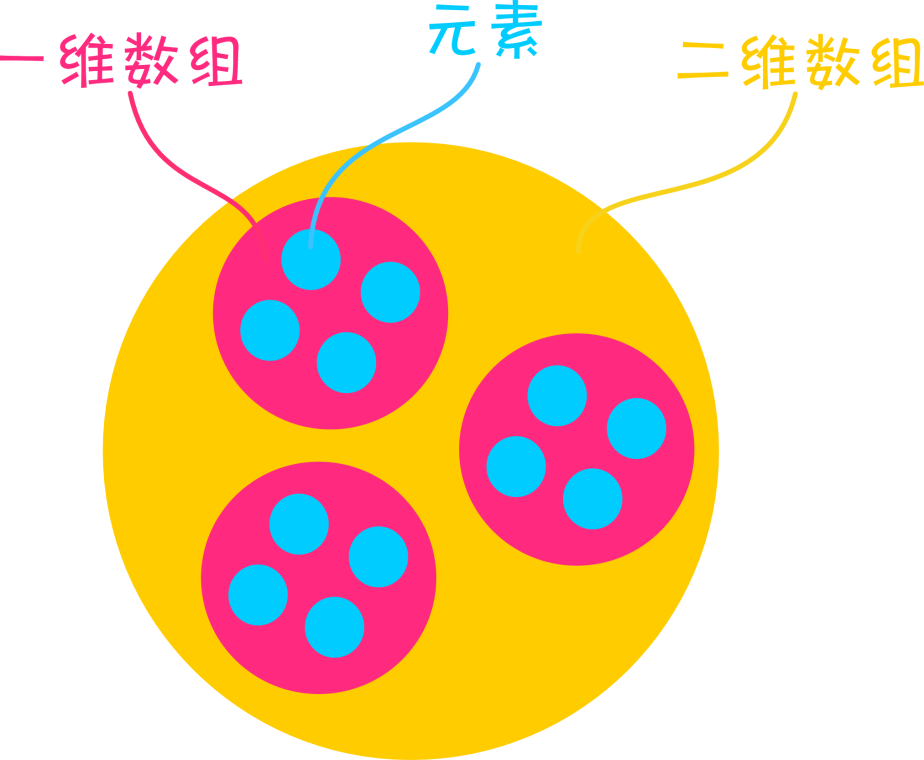 图15-3 数组关系图 通过上面这个图,元素、一维数组、二维数组之间的关系就一目了然了。一维数组由元素组成,而二维数组则是由一个个一维数组组成的,关系就是那么简单。 代码1中,分别用10个数组,每个数组有8个元素,每个元素依次对应到数码管b~DP引脚状态值,这样就能在数码管上反映为0~9的数字显示。 而我们现在则是把前面散开的10个一维数组整合到一起,变为一个二维数组。同样通过索引的方式file:///C:\Users\dzy219\AppData\Local\Temp\ksohtml17644\wps1.png来找到这些元素。但,还是不要忘了索引号也是从0开始的!前面的方括号写入的是只是元素个数。  这就是一个二维数组。索引号从0开始,如果让你找number[0][0],能找到是哪个数吗?就是二维数组中第1行的第1个数,为0。number[9][7]也就是第10行的第8个数,为1。 [mw_shl_code=c,true]void numberShow(int i){ //该该函数用来显示数字 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin, number[pin - 2]); } } void loop() { for(int j = 0; j <= 9 ; j++){ numberShow(j); //调用numberShow()函数,显示0~9 delay(500); } } void numberShow(int i){ //该该函数用来显示数字 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin, number[pin - 2]); } } [/mw_shl_code] 上面这两段代码我们整合在一起看,loop()主函数中,for循环让变量j在0~9循环,j每赋一次值,numberShow()函数就要运行一次。 numberShow()函数整个运行过程如下: 程序一开始j=0,numberShow(j)为numberShow(0),跳回到上面的numberShow()函数,i现在的值就为0了,pin初始值为2,所以digitalWrite()现在值为digitalWrite(2,number[0][0]),回到数组number[10][8]中找到number[0][0]对应的值,为0。此时,digitalWrite(2,0),代表引脚2被置LOW,引脚2对应的b段点亮(共阳数码管置LOW才被点亮)。之后再是循环pin=3,pin=4,……,一直到pin=9整个for循环才结束,也代表数组的第一行的8个元素全被运行了一遍,最终显示一个数字“0”。 回顾一下代码1是如何显示一个数字“0”的: [mw_shl_code=c,true]// 显示数字0 int n0[8]={0,0,0,1,0,0,0,1}; //数字引脚2~9依次按数组n0[8]中的数据显示 for(int pin = 2; pin <= 9 ; pin++){ digitalWrite(pin,n0[pin-2]); } [/mw_shl_code] 原理是一样的,通过给引脚2~9循环赋值,控制数码管b~DP段亮灭,就能显示出一个我们想要的数字。 numberShow(0)循环完后,再次回到loop()中的for函数: j=1 numberShow(1) i=1 number[1][pin-2] 显示数字1 j=2 numberShow(2) i=2 number[2][pin-2] 显示数字2 j=3 numberShow(3) i=3 number[3][pin-2] 显示数字3 …… j=9 numberShow(9) i=9 number[9][pin-2] 显示数字9 好了,这就是整段代码的分析过程,好好体会一下一维数组和二维数组的区别,以及整段代码如何巧妙运行的。 了解了数码管和红外接收管各自的工作原理后,我们需要把这两者结合起来,看看红外接收管和数码管结合能迸发出怎样的火花呢?想到了吗?遥控数码管!Arduino控制器把红外接收管从Mini遥控器那儿接到的信号,经处理传达给数码管。让Mini遥控器上0~9对应在数码管上显示0~9,除此之外,还有递减,递增的功能。 所需元件 ■ 1× 八段数码管  ■ 1× 红外接收管  ■ 1× Mini遥控器  ■ 8× 220欧电阻  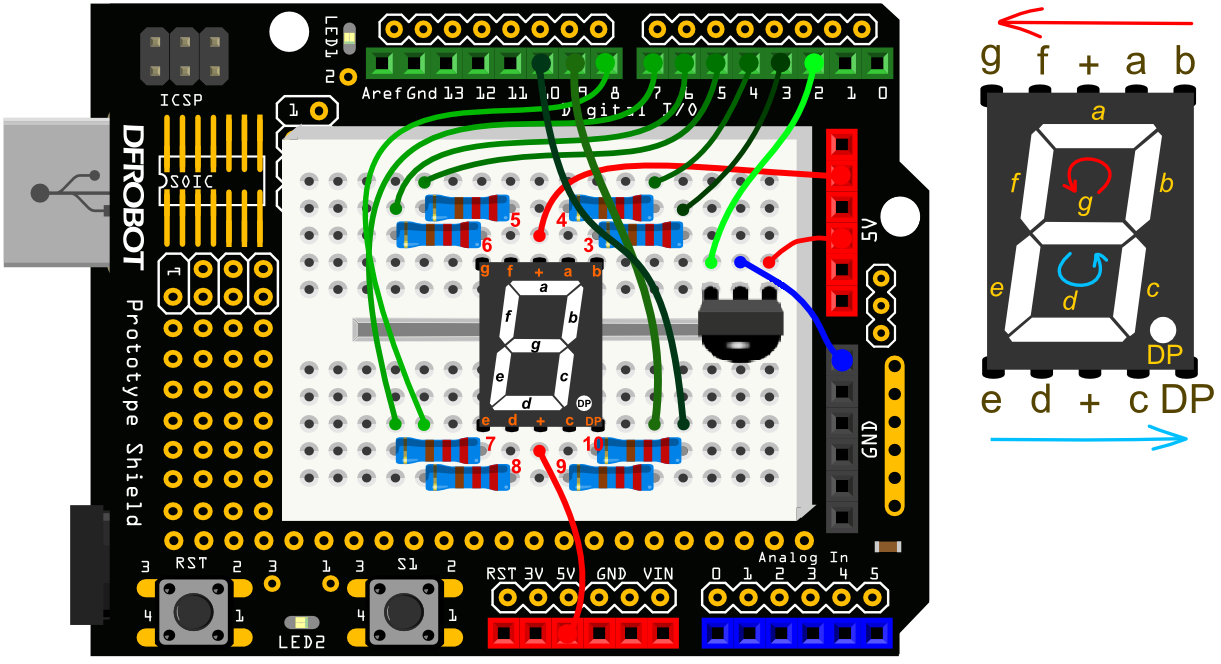 图15-4红外遥控数码管连线图 代码编程 在输入代码的过程中,结合前面的项目十四和十五,看看整段代码是如何把这两者整合的,程序中是如何处理把红外接收管接到的信号,再转变为数码管的显示的。 样例程序15-3 [mw_shl_code=c,true]//项目十五 - 红外遥控数码管 #include <DFRobot_IRremote.h> //调用IRremote.h库 int RECV_PIN = 2; //定义RECV_PIN变量为2 IRremote_Receive remoteReceive_2; //声明对象 String results; //定义results变量为红外结果存放位置 int currentNumber = 0; //该变量用于存放当前数字 String codes[12]= //该数组用来存放红外遥控器发出的红外码 { "FD30CF","FD08F7", // 0 ,1 "FD8877","FD48B7", // 2 ,3 "FD28D7","FDA857", // 4 ,5 "FD6897","FD18E7", // 6 ,7 "FD9867","FD58A7", // 8 ,9 "FD20DF","FD609F", // + ,- }; int number[10][8] = //该数组用来存放数码管显示的数字 { {0,0,0,1,0,0,0,1},//0 {0,1,1,1,1,1,0,1},//1 {0,0,1,0,0,0,1,1},//2 {0,0,1,0,1,0,0,1},//3 {0,1,0,0,1,1,0,1},//4 {1,0,0,0,1,0,0,1},//5 {1,0,0,0,0,0,0,1},//6 {0,0,1,1,1,1,0,1},//7 {0,0,0,0,0,0,0,1},//8 {0,0,0,0,1,1,0,1} //9 }; void numberShow(int i) { //该函数用来让数码管显示数字 for(int pin = 3; pin <= 10 ; pin++){ digitalWrite(pin, number[pin - 3]); } } void setup(){ Serial.begin(9600); //设置波特率为9600 remoteReceive_2.begin(RECV_PIN); //启动红外解码 for(int pin = 3 ; pin <= 10 ; pin++){ //设置数字引脚2~9为输出模式 pinMode(pin, OUTPUT); digitalWrite(pin, HIGH); } } void loop() { //判断是否接收到解码数据,把接收到的数据存储在变量results中 results = (remoteReceive_2.getIrCommand()); if (results !="0") { for(int i = 0; i <= 11; i++){ //判断是否接收到0~9按键的红外码 if(results == codes&& i <= 9){ numberShow(i); //在数码管上对应显示0~9 currentNumber = i; //把当前显示的值赋给变量currentNumber Serial.println(i); break; } // 判断是否接收到递减的红外码,并且当前值不为0 else if(results == codes[10]&& currentNumber != 0){ currentNumber--; //当前值递减 numberShow(currentNumber); //数码管显示递减后的值 Serial.println(currentNumber); //串口输出递减后的值 break; } //判断是否接收到递增的红外码,并且当前值不为9 else if(results == codes[11]&& currentNumber != 9){ currentNumber++; //当前值递增 numberShow(currentNumber); //数码管显示递增后的值 Serial.println(currentNumber); //串口输出递增后的值 break; } } Serial.println(results); //串口监视器查看红外码 } }[/mw_shl_code]  图15-5遥控数按键说明 下载完代码后,尝试按下上图15-5指出部分的按钮,看看是数码管是个怎样的变化。 [mw_shl_code=c,true]int currentNumber = 0; //该变量用于存放当前数字 [/mw_shl_code] 在这里,我们多定义了一个变量currentNumber,通过名字应该就可以看出来含义了吧。这个变量的作用是,用来存储当前的数字,数字递增递减是能找到对应的参照点。 同样用数组的方式来存放这些红外码。long是变量的类型,如果你还想用遥控器上的其他按钮来控制做一些其他事情的话,把红外码替换掉就好了。 [mw_shl_code=c,true]String codes[12]= //该数组用来存放红外遥控器发出的红外码 { ”FD30CF”,”FD08F7”, // 0 ,1 ”FD8877”,”FD48B7”, // 2 ,3 ”FD28D7”,”FDA857”, // 4 ,5 ”FD6897”,”FD18E7”, // 6 ,7 ”FD9867”,”FD58A7”, // 8 ,9 ”FD20DF”,”FD609F”, // + ,- }; [/mw_shl_code] 紧接着是,一个二维数组number[10][8]的定义。我们在数码管那一章节已有说明了,通过调用数组的元素,把这些元素的值依次赋给数码管显示段的控制引脚,并在 numberShow()函数中得以实现数码管数字显示。 setup()函数中,仍然是波特率设置,启动红外解码,数字引脚模式设置等,这些常规设置。 到了主函数loop(),一开始还是先判断是否接收到红外码,并把接收到的数据存储在变量results中。 [mw_shl_code=c,true] if (results !="0") { [/mw_shl_code] 一旦接收到数据后,程序就要做两件事。第一件事,判断是哪个红外码,也就能对应找到是哪个按键按下的。第二件事,找到对应按扭后,让数码管干什么事?让我们接着看看程序是如何完成这两件事的。 第一件事: 会有三种情况需要判断,第一种情况,按遥控器0~9时,数码管显示数字0~9。第二种情况,每按下“后退”键,数字在原有基础上递减一位,直到减到0为止。第三种情况,每按下“前进”键,数字在原有基础上增一位,直到增到9为止。 对这三种情况进行判断,这里呢,同样用到了if语句,与以往有所不同的,我们选择用 if…else if。if…else和if…else if的区别在哪儿?区别在于else if后面需要接判断表达式,else不需要判断表达式。然而,不管是else还是else if都是依附于if语句存在的,不能独立使用。 回到代码中,这就是以下三种情况: if(results == codes&& i <= 9){ if(results == codes[10]&& currentNumber != 0){ if(results == codes[11]&& currentNumber != 9){ 第一个if判断的是第一种情况,显示数字0~9。判断条件就是接收到的数据results.value的值是不是数组中codes[0]~codes[9]的红外码。 第二个if判断的是第二种情况,是否接到“后退”键指令,也就是code[10]= 0xFD20DF,并且当前显示数字不为0。 第三个if判断的是第三种情况,是否接到“前进”键指令,也就是code[11]= 0xFDA857,并且当前显示数字不为9。 还有一个问题——如何找到数组中的元素呢?所以,就需要在if判断前设置一个for循环,让变量i一直在0~11之间循环。 第一件事判断是哪个红外码完成后,开始执行第二件事。就是每个if语句后,都有相应的执行代码,其中有一处需要进行讲解。 break语句 break语句用于跳出循环。在判断是否为数字0-9、“后退”键、或“前进”键,且执行完相应的显示后,使用break语句,能够跳出当前循环,不再向下执行代码。这样做是为了实现,在一次for循环中只执行一次数码管显示的刷新,排除干扰造成的误显示,并且能够提升程序执行的效率。 整段代码就讲完了,这段代码应该是所以项目中最复杂的代码,可以一开始不能完全看明白,不过没关系,实践出真知,通过一遍遍不断的尝试,相信你总有一天能明白的。 通过这个遥控项目,DIY一个你的遥控作品吧!比如简单的会动的小人,结合我们前面的舵机,通过遥控器上不同的按键,让舵机转动不同的角度,感觉随你的控制转动,发挥你的想象做出更多Arduino作品吧! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶