|
10530| 2
|
[入门] 【智控万物】晃头控灯 |
本帖最后由 云天 于 2021-6-22 18:19 编辑 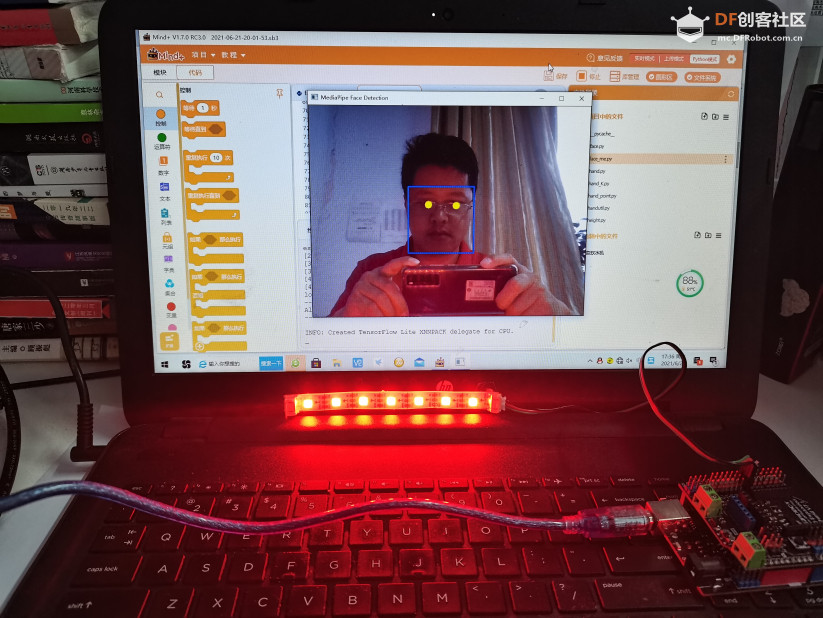 【MediaPipe 人脸检测】 MediaPipe 人脸检测是一种超快的人脸检测解决方案,具有 6 个地标和多人脸支持。它基于BlazeFace,这是一种轻量级且性能良好的人脸检测器,专为移动 GPU 推理量身定制。检测器的超实时性能使其能够应用于任何需要准确的面部感兴趣区域作为其他任务特定模型输入的实时取景器体验,例如 3D 面部关键点或几何估计(例如MediaPipe Face Mesh),面部特征或表情分类,以及面部区域分割。BlazeFace 使用了一个轻量级的特征提取网络,其灵感来自于MobileNetV1/V2,但与MobileNetV1/V2不同,后者是一种 GPU 友好的锚点方案,修改自Single Shot MultiBox Detector (SSD),以及替代非极大值抑制的改进平局分辨率策略。 检测到的人脸的集合,其中每个人脸都表示为一个检测原始消息,其中包含一个边界框和 6 个关键点(右眼、左眼、鼻尖、嘴巴中心、右耳和左耳)。边界框由xmin和width(均由[0.0, 1.0]图像宽度归一化)和ymin和height(均由[0.0, 1.0]图像高度归一化)组成。每个关键点由x和组成y,分别[0.0, 1.0]由图像宽度和高度归一化。 【程序代码】 通过左右眼纵坐标的差来判断头向左歪还是向右歪 |
|
运行程序,窗口没有弹出,有以下提示,怎么原因?拜托 [10] Opening COM26... [20] Waiting 4 seconds(arduino_wait) for Arduino devices to reset... [22] Arduino compatible device found and connected to COM26 [30] Retrieving Arduino Firmware ID... [32] Arduino Firmware ID: 2.6 DFRobot firmata [40] Retrieving analog map... [42] Auto-discovery complete. Found 20 Digital Pins and 6 Analog Pins ------------------------------ All right. PinPong go... ------------------------------ INFO: Created TensorFlow Lite XNNPACK delegate for CPU. >>> |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






