|
行空板自带的接口数量有限,使用时可能不够便利。为了解决这一问题,DFRobot推出了一款扩展板。这款扩展板大大简化了连接高功率设备的过程,如舵机和电机。通过扩展板,我们可以更灵活地进行项目开发,充分利用各种外设,提高制作效率和设备兼容性。这不仅扩展了行空板的应用场景,还为创客提供了更广阔的创作空间。
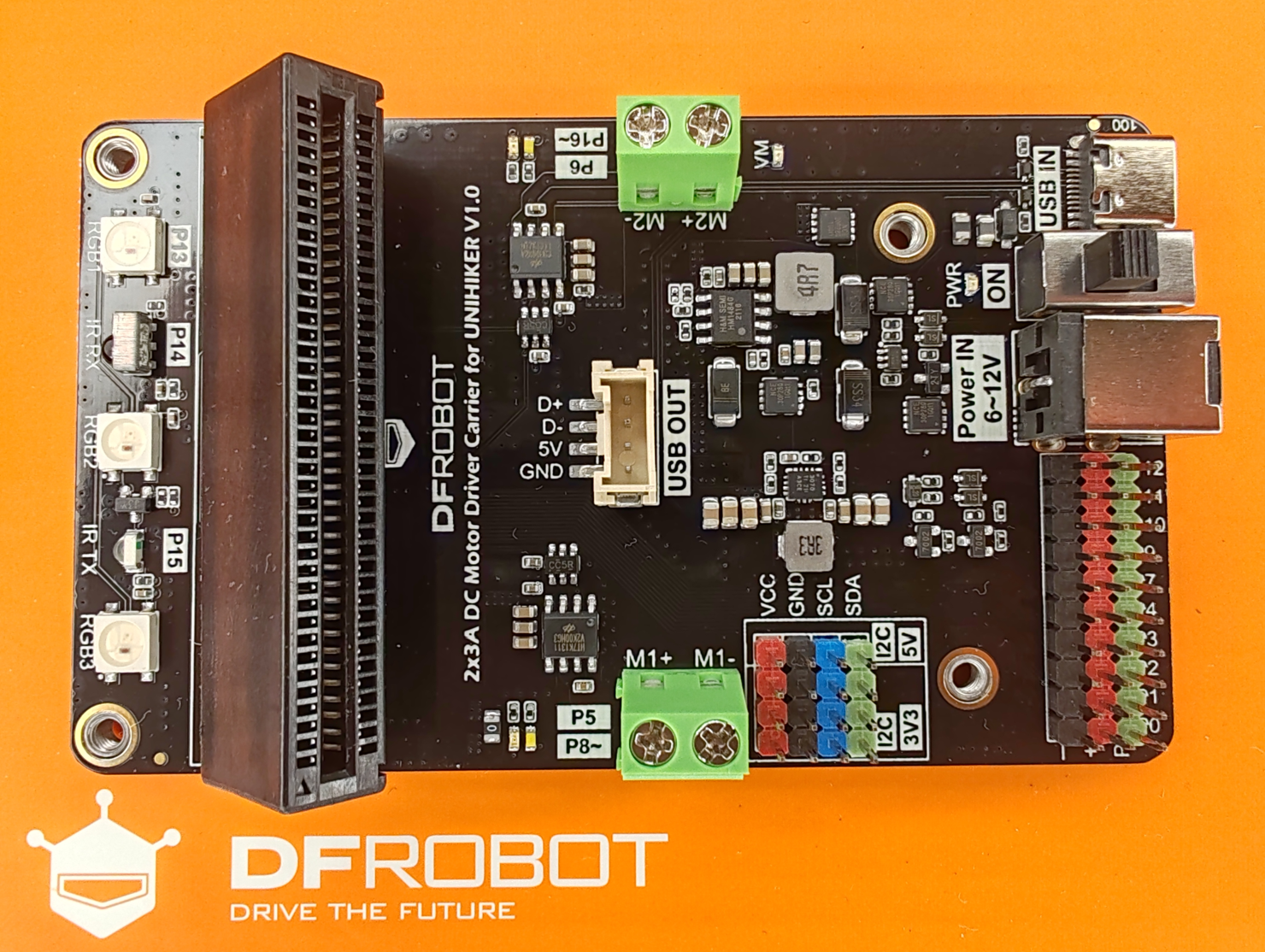
下面是一个舵机测试程序 注意:这里如果需要从按键中断中改变主循环里的变量需要声名变量为global类型  在测试过程中发现扩展板上提供的pin脚电压只有3.3v对于一些大功率的外设来说还是不太理想,5v的pin脚只有一路i2c可以使用,当要驱动两组舵机的时候需要从5v i2c这里引出一对5v供电,这里不太方便希望未来的产品里可以有所改进
提高供电能力后对舵机的控制变得十分平滑。
在此基础上我开发了一个基于OpenCV人脸识别的“人脸跟随”系统
【物料】 行空板 x1 行空板扩展版 x1 舵机 MG996R x2 usb摄像头 x1 12v变压器 x1
【连接图】 理想连接图 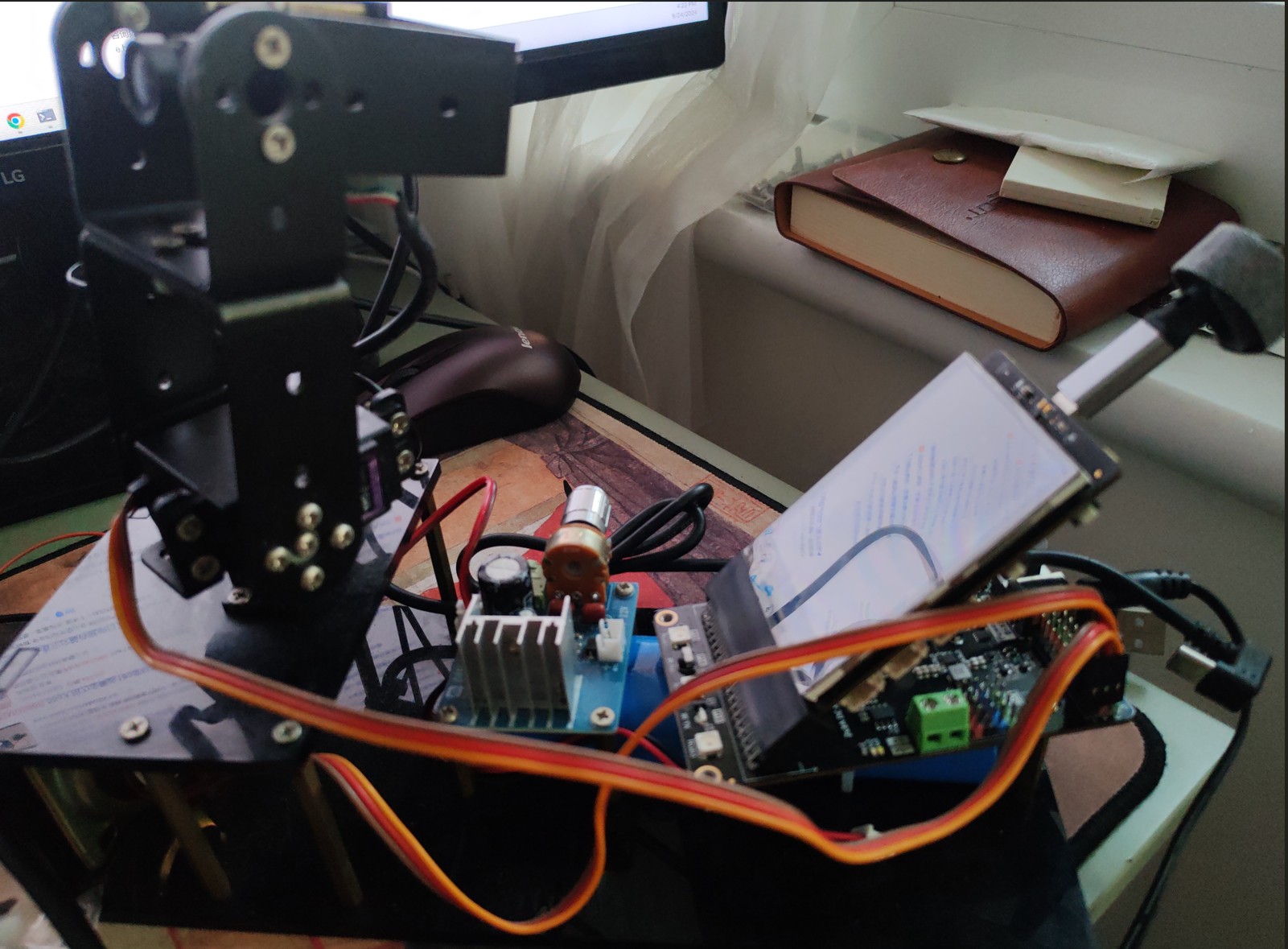 实际连接图 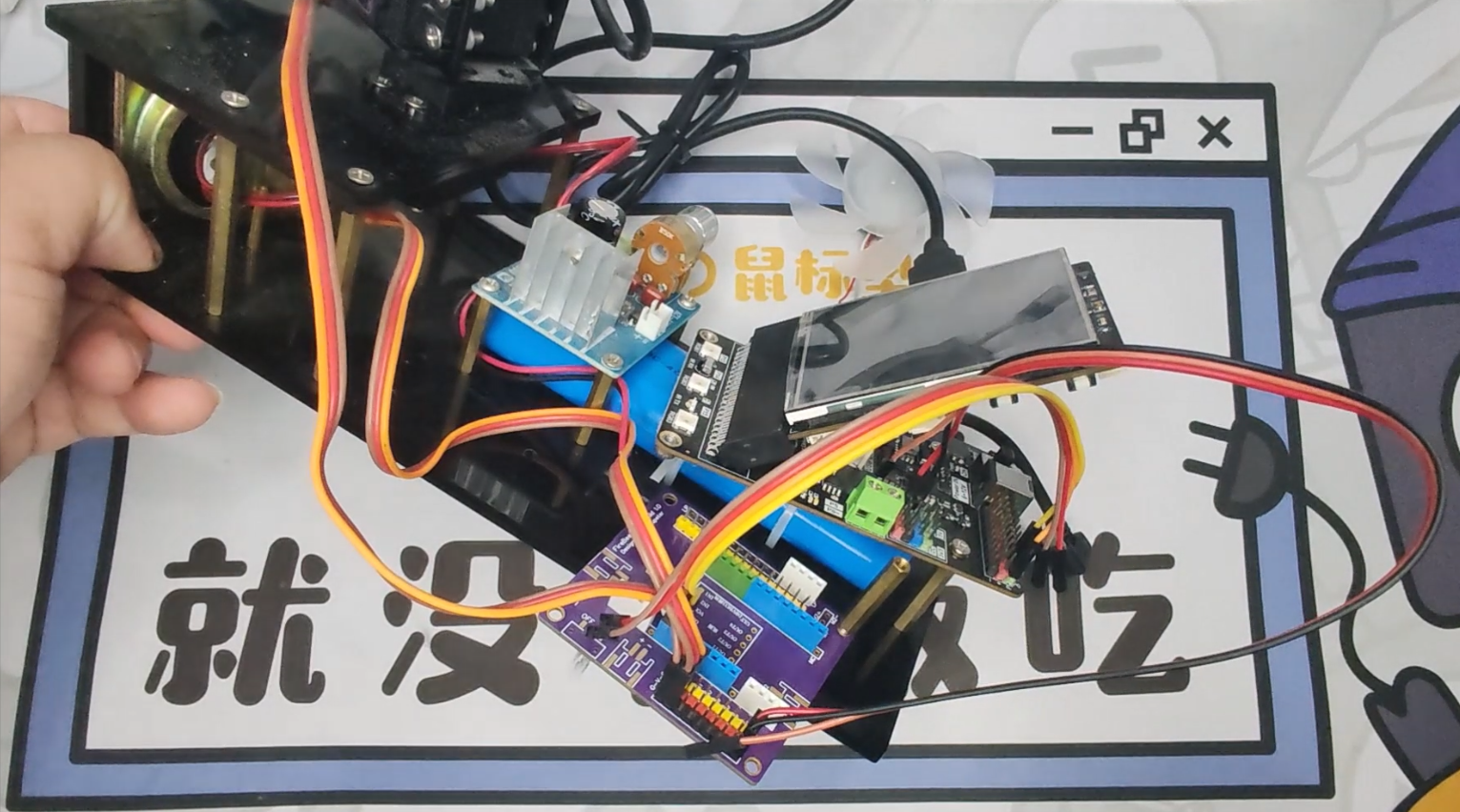
【开发环境】 Mind+ python模式
- import cv2
- from pinpong.board import Board, Pin, Servo
- import time
-
- # 初始化级联分类器
- face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')
-
- # 舵机初始位置
- servo_x_pos = 45 # 横向舵机初始角度
- servo_y_pos = 60 # 竖向舵机初始角度
-
- Board().begin()
- servo_x = Servo(Pin(Pin.P2))
- servo_y = Servo(Pin(Pin.P0))
-
- def send_servo_command(x_pos, y_pos):
- servo_x.write_angle(x_pos)
- servo_y.write_angle(y_pos)
-
- send_servo_command(servo_x_pos, servo_y_pos)
-
- # 打开摄像头
- cap = cv2.VideoCapture(0)
-
- screen_width, screen_height = 280, 320
- cap.set(cv2.CAP_PROP_FRAME_WIDTH, screen_width)
- cap.set(cv2.CAP_PROP_FRAME_HEIGHT, screen_height)
-
- # 创建一个命名窗口并设置为无边框
- cv2.namedWindow('Face Tracking', cv2.WND_PROP_FULLSCREEN)
- cv2.setWindowProperty('Face Tracking', cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
-
- if not cap.isOpened():
- print('无法打开摄像头')
- exit()
-
- while True:
- ret, frame = cap.read()
- if not ret:
- print("无法读取帧")
- break
-
- gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
- faces = face_cascade.detectMultiScale(gray, 1.1, 4)
-
- frame_height, frame_width = frame.shape[:2]
- frame_center_x = frame_width // 2
- frame_center_y = frame_height // 2
-
- for (x, y, w, h) in faces:
- face_center_x = x + w // 2
- face_center_y = y + h // 2
-
- # 绘制矩形框
- cv2.rectangle(frame, (x, y), (x + w, y + h), (255, 0, 0), 2)
-
- # 计算偏移量
- offset_x = face_center_x - frame_center_x
- offset_y = face_center_y - frame_center_y
-
- # 调整舵机角度(使舵机反向移动)
- if abs(offset_x) > frame_width // 10: # 误差范围
- if offset_x > 0:
- servo_x_pos -= 1 # 减小角度向左转
- else:
- servo_x_pos += 1 # 增加角度向右转
-
- if abs(offset_y) > frame_height // 10: # 误差范围
- if offset_y > 0:
- servo_y_pos += 1 # 增加角度向下转
- else:
- servo_y_pos -= 1 # 减小角度向上转
-
- # 限制舵机范围防止损坏
- servo_x_pos = max(0, min(180, servo_x_pos))
- servo_y_pos = max(0, min(180, servo_y_pos))
-
- send_servo_command(servo_x_pos, servo_y_pos)
- break
-
- cv2.imshow('Face Tracking', frame)
-
- # 按下 'q' 键退出
- if cv2.waitKey(1) & 0xFF == ord('q'):
- break
-
- #time.sleep(0.05)
-
- # 清理资源
- cap.release()
- cv2.destroyAllWindows()
【未来目标】 在此基础上可以继续开发自动拍照、保存、上传等功能。还可以向语音命令控制或者手势识别控制方向扩展,用语音控制或者手势识别控制拍照保存上传等功能
【相关链接】 行空板扩展板开箱视频
| 


 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






