本帖最后由 云天 于 2024-12-22 20:24 编辑
【项目背景】 随着智能手机和物联网技术的快速发展,手势控制作为一种新颖的交互方式,正在逐渐渗透到我们的日常生活中。华为手机的隔空手势截屏功能,就是一个很好的例子,它通过识别用户的手势来实现屏幕截图,不仅提高了用户体验,还展示了手势控制技术在移动设备上的应用潜力。 【项目设计】 本项目旨在通过两个行空板实现类似的手势控制屏幕截图功能。我们将利用OpenCV库来采集手势图像,这是一个开源的计算机视觉和机器学习软件库,它提供了多种图像和视频处理功能,非常适合用于实时手势识别。同时,我们将使用Mediapipe库来识别手势,Mediapipe是一个由Google开发的跨平台框架,它集成了多种先进的机器学习模型,包括手势识别,能够实时准确地识别手部关键点和手势。 项目的核心在于通过物联网技术,实现两个行空板之间的图像传输。当行空板1通过摄像头采集到的手势被识别为拳头时,它将触发屏幕截图功能,并将截图通过物联网发送给行空板2。而行空板2在识别到张开的手掌手势时,将接收并显示通过物联网传输过来的图片。 这个项目不仅展示了手势识别技术在物联网领域的应用,还体现了如何通过智能硬件和软件的结合,实现更加直观和便捷的用户交互体验。通过这种方式,我们可以探索手势控制在智能家居、工业自动化、游戏娱乐等多个领域的应用潜力,推动智能交互技术的发展。 【硬件设计】 
摄像头通过USB接口连接行空板,供电使用充电宝。
【项目准备】
1.行空板安装 pyautogui,终端安装:sudo apt-get install scrot
2.行空板安装MediaPipe库,安装方法:https://www.unihiker.com.cn/wiki ... 3%E4%B8%8B%E8%BD%BD
【程序编写】
1.测试行空板画图,发送屏幕截图至siot物联网平台。

2.增加手势(握拳)识别
- import cv2
- import mediapipe as mp
- import math
- import sys
- import siot
- import time
-
- import pyautogui
- import numpy as np
- from unihiker import GUI
- import base64
- from io import BytesIO
- from PIL import Image
- from unihiker import Audio
-
- sys.path.append("/root/mindplus/.lib/thirdExtension/nick-base64-thirdex")
- def frame2base64(frame):
- frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
- img = Image.fromarray(frame) #将每一帧转为Image
- output_buffer = BytesIO() #创建一个BytesIO
- img.save(output_buffer, format='JPEG') #写入output_buffer
- byte_data = output_buffer.getvalue() #在内存中读取
- base64_data = base64.b64encode(byte_data) #转为BASE64
- return base64_data #转码成功 返回base64编码
-
- def base642base64(frame):
- data=str('data:image/png;base64,')
- base64data = str(frame2base64(frame))
- framedata = base64data[2:(len(base64data)-1)]
- base642base64_data = data + str(framedata)
- return base642base64_data
-
- # 事件回调函数
- def mouse_move(x,y):
- global HuaDongJianGe
- global startX, startY,endX, endY,bs,img
- global 画图
- print((str(startX) + str((str(":") + str((str(startY) + str((str(" ") + str((str(endX) + str((str(":") + str(endY)))))))))))))
- if ((time.time() - HuaDongJianGe) > 0.5):
- bs = 0
- HuaDongJianGe = time.time()
- if (bs == 0):
- startX = x
- startY = y
- endX = x
- endY = y
- bs = 1
- 画点=u_gui.fill_circle(x=x,y=y,r=2,color="#0000FF")
- 画图=u_gui.draw_line(x0=startX,y0=startY,x1=endX,y1=endY,width=5,color="#0000FF")
- else:
- startX = endX
- startY = endY
- endX = x
- endY = y
- 画点=u_gui.fill_circle(x=x,y=y,r=2,color="#0000FF")
- 画图=u_gui.draw_line(x0=startX,y0=startY,x1=endX,y1=endY,width=5,color="#0000FF")
- def qingkong():
- u_gui.clear()
- def jietu():
- screenshot = pyautogui.screenshot()
- screenshot.save('screenshot.png')
- img = cv2.imread("screenshot.png", cv2.IMREAD_UNCHANGED)
-
- siot.publish(topic="df/pic", data=str(base642base64(img)))
-
- mp_hands = mp.solutions.hands
- hands = mp_hands.Hands(static_image_mode=False, max_num_hands=1, min_detection_confidence=0.5, min_tracking_confidence=0.5)
- mp_drawing = mp.solutions.drawing_utils
- u_audio = Audio()
- u_gui=GUI()
- u_gui.on_mouse_move(mouse_move)
- startX = 0
- startY = 0
- endX = 0
- endY = 0
- bs = 0
- bs2 = 0
- HuaDongJianGe = time.time()
- siot.init(client_id="7134840160197196",server="10.1.2.3",port=1883,user="siot",password="dfrobot")
-
- siot.connect()
- siot.loop()
- u_gui.on_mouse_move(mouse_move)
-
-
-
- def distance(point1, point2):
- return math.sqrt((point2.x - point1.x)**2 + (point2.y - point1.y)**2)
- # 定义一个函数来判断手势
- def determine_gesture(landmark):
- # 定义拳头和手掌张开的阈值
- fist_threshold = 1 # 拳头的阈值,较小的距离表示拳头
- open_hand_threshold = 1.5 # 手掌张开的阈值,较大的距离表示手掌张开
-
- # 获取拇指尖和手腕之间的距离
- middle_FINGER_TIP = landmark.landmark[mp_hands.HandLandmark.MIDDLE_FINGER_TIP]
- middle_FINGER_MCP = landmark.landmark[mp_hands.HandLandmark.MIDDLE_FINGER_MCP]
- wrist = landmark.landmark[mp_hands.HandLandmark.WRIST]
- d1 = distance(middle_FINGER_TIP, wrist)
- d2 = distance(middle_FINGER_MCP, wrist)
- d=d1/d2
- print(d1/d2)
- # 根据距离判断手势
-
- if d < fist_threshold:
- return "Fist"
- elif d > open_hand_threshold:
- return "Open Hand"
- else:
- return "Unknown"
-
- # 打开摄像头
- cap = cv2.VideoCapture(0)
-
- while cap.isOpened():
- success, image = cap.read()
-
- if not success:
- continue
- image = cv2.resize(image,( 240, 320))
-
- # 将BGR图像转换为RGB
- image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
- image = cv2.flip(image, 1)
-
- # 处理图像并获取手部关键点
- results = hands.process(image)
-
- # 绘制手部关键点和连接线
- image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
- if results.multi_hand_landmarks:
- for hand_landmarks in results.multi_hand_landmarks:
- mp_drawing.draw_landmarks(image, hand_landmarks, mp_hands.HAND_CONNECTIONS)
- # 判断手势
- gesture = determine_gesture(hand_landmarks)
- print(gesture)
- if gesture=="Fist":
- if bs2==0:
- bs2=1
- jietu()
- qingkong()
- u_audio.play("ding.mp3")
- else:
- bs2=0
- #cv2.putText(image, gesture, (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
-
- # 显示图像
- #cv2.imshow("Image", image)
-
- # 按'q'退出
- #if cv2.waitKey(1) & 0xFF == ord('q'):
- ##break
-
- # 释放资源
- cap.release()
- #cv2.destroyAllWindows()
3.接收截图
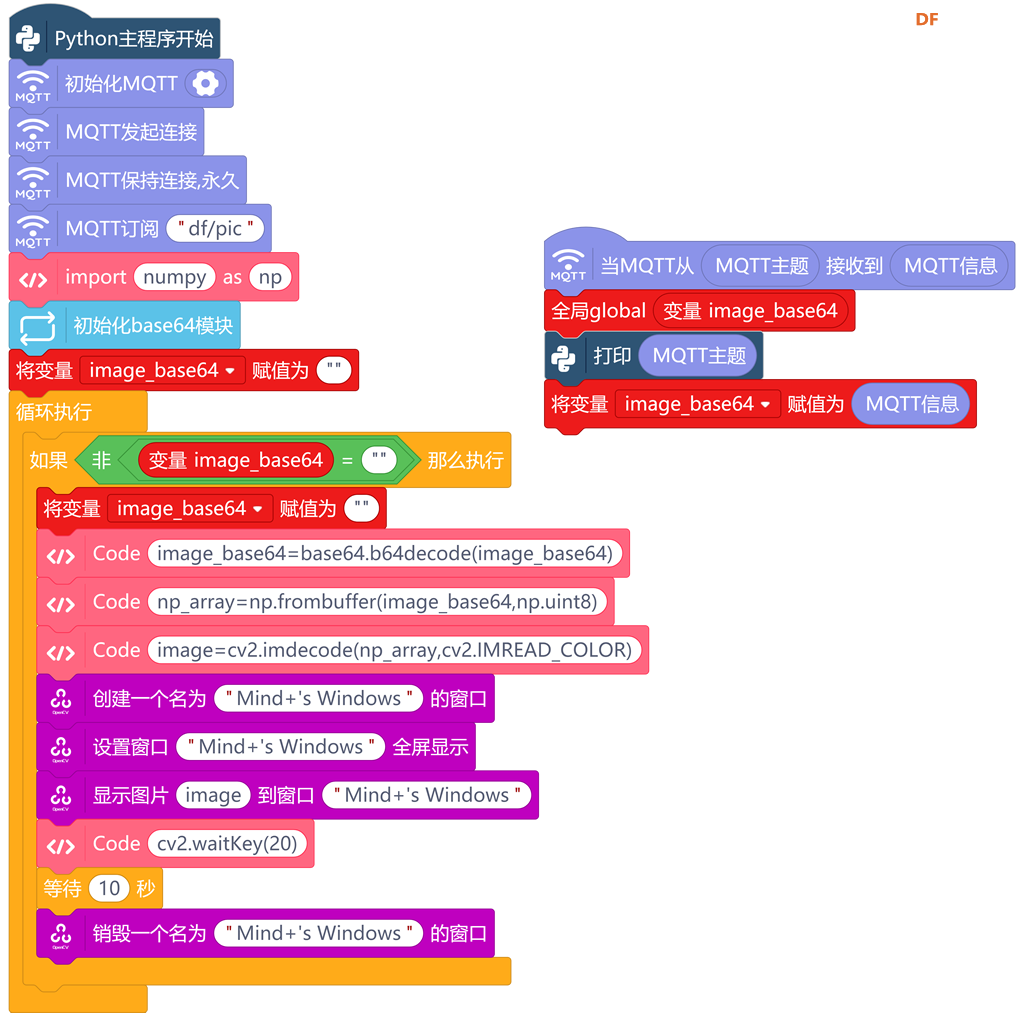
4.手势(手掌张开)接收程序
- import cv2
- import mediapipe as mp
- import math
- import sys
- import siot
- import time
- import pyautogui
- import numpy as np
- from unihiker import GUI
- import base64
- from io import BytesIO
- from PIL import Image
- from unihiker import Audio
-
- sys.path.append("/root/mindplus/.lib/thirdExtension/nick-base64-thirdex")
- def frame2base64(frame):
- frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
- img = Image.fromarray(frame) #将每一帧转为Image
- output_buffer = BytesIO() #创建一个BytesIO
- img.save(output_buffer, format='JPEG') #写入output_buffer
- byte_data = output_buffer.getvalue() #在内存中读取
- base64_data = base64.b64encode(byte_data) #转为BASE64
- return base64_data #转码成功 返回base64编码
-
- def base642base64(frame):
- data=str('data:image/png;base64,')
- base64data = str(frame2base64(frame))
- framedata = base64data[2:(len(base64data)-1)]
- base642base64_data = data + str(framedata)
- return base642base64_data
-
- # 事件回调函数
- def mouse_move(x,y):
- global HuaDongJianGe
- global startX, startY,endX, endY,bs,img
- global 画图
- print((str(startX) + str((str(":") + str((str(startY) + str((str(" ") + str((str(endX) + str((str(":") + str(endY)))))))))))))
- if ((time.time() - HuaDongJianGe) > 0.5):
- bs = 0
- HuaDongJianGe = time.time()
- if (bs == 0):
- startX = x
- startY = y
- endX = x
- endY = y
- bs = 1
- 画点=u_gui.fill_circle(x=x,y=y,r=2,color="#0000FF")
- 画图=u_gui.draw_line(x0=startX,y0=startY,x1=endX,y1=endY,width=5,color="#0000FF")
- else:
- startX = endX
- startY = endY
- endX = x
- endY = y
- 画点=u_gui.fill_circle(x=x,y=y,r=2,color="#0000FF")
- 画图=u_gui.draw_line(x0=startX,y0=startY,x1=endX,y1=endY,width=5,color="#0000FF")
- def qingkong():
- u_gui.clear()
- def jietu():
- screenshot = pyautogui.screenshot()
- screenshot.save('screenshot.png')
- img = cv2.imread("screenshot.png", cv2.IMREAD_UNCHANGED)
-
- siot.publish(topic="df/pic", data=str(base642base64(img)))
-
- mp_hands = mp.solutions.hands
- hands = mp_hands.Hands(static_image_mode=False, max_num_hands=1, min_detection_confidence=0.5, min_tracking_confidence=0.5)
- mp_drawing = mp.solutions.drawing_utils
- u_audio = Audio()
- u_gui=GUI()
- u_gui.on_mouse_move(mouse_move)
- startX = 0
- startY = 0
- endX = 0
- endY = 0
- bs = 0
- bs2 = 0
- HuaDongJianGe = time.time()
- siot.init(client_id="7134840160197196",server="10.1.2.3",port=1883,user="siot",password="dfrobot")
- siot.connect()
- siot.loop()
- u_gui.on_mouse_move(mouse_move)
-
- def distance(point1, point2):
- return math.sqrt((point2.x - point1.x)**2 + (point2.y - point1.y)**2)
- # 定义一个函数来判断手势
- def determine_gesture(landmark):
- # 定义拳头和手掌张开的阈值
- fist_threshold = 1 # 拳头的阈值,较小的距离表示拳头
- open_hand_threshold = 1.5 # 手掌张开的阈值,较大的距离表示手掌张开
-
- # 获取拇指尖和手腕之间的距离
- middle_FINGER_TIP = landmark.landmark[mp_hands.HandLandmark.MIDDLE_FINGER_TIP]
- middle_FINGER_MCP = landmark.landmark[mp_hands.HandLandmark.MIDDLE_FINGER_MCP]
- wrist = landmark.landmark[mp_hands.HandLandmark.WRIST]
- d1 = distance(middle_FINGER_TIP, wrist)
- d2 = distance(middle_FINGER_MCP, wrist)
- d=d1/d2
- print(d1/d2)
- # 根据距离判断手势
-
- if d < fist_threshold:
- return "Fist"
- elif d > open_hand_threshold:
- return "Open Hand"
- else:
- return "Unknown"
-
- # 打开摄像头
- cap = cv2.VideoCapture(0)
-
- while cap.isOpened():
- success, image = cap.read()
-
- if not success:
- continue
- image = cv2.resize(image,( 240, 320))
-
- # 将BGR图像转换为RGB
- image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
- image = cv2.flip(image, 1)
-
- # 处理图像并获取手部关键点
- results = hands.process(image)
-
- # 绘制手部关键点和连接线
- image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
- if results.multi_hand_landmarks:
- for hand_landmarks in results.multi_hand_landmarks:
- mp_drawing.draw_landmarks(image, hand_landmarks, mp_hands.HAND_CONNECTIONS)
- # 判断手势
- gesture = determine_gesture(hand_landmarks)
- print(gesture)
- if gesture=="Fist":
- if bs2==0:
- bs2=1
- jietu()
- qingkong()
- u_audio.play("ding.mp3")
- else:
- bs2=0
- #cv2.putText(image, gesture, (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
-
- # 显示图像
- #cv2.imshow("Image", image)
-
- # 按'q'退出
- #if cv2.waitKey(1) & 0xFF == ord('q'):
- ##break
-
- # 释放资源
- cap.release()
- #cv2.destroyAllWindows()
【演示视频】
|





 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






