|
6588| 1
|
[讨论] 【树莓派】人脸追踪(3)树莓派+OpenCV |
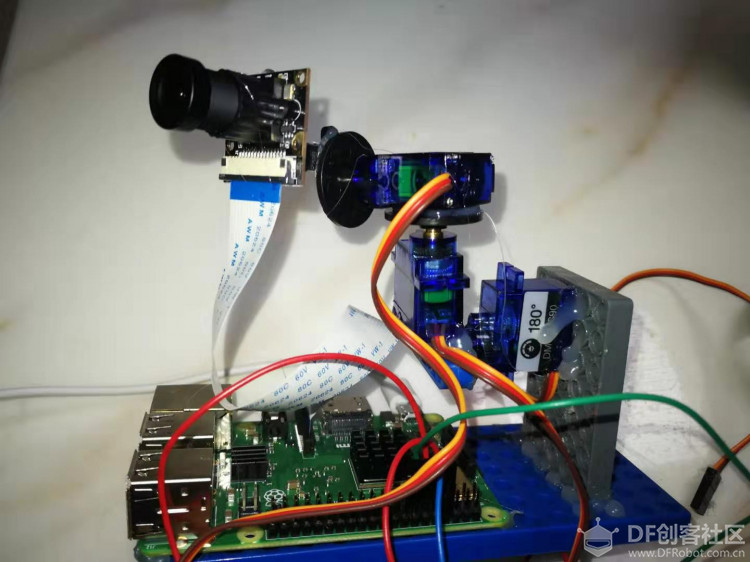  1、代码 [mw_shl_code=python,true]import numpy as np import cv2 from time import sleep import RPi.GPIO as GPIO GPIO.setmode(GPIO.BCM) GPIO.setwarnings(False) pan = 27 tilt = 17 GPIO.setup(tilt, GPIO.OUT) # white => TILT GPIO.setup(pan, GPIO.OUT) # gray ==> PAN def setServoAngle(servo, angle): assert angle >=5 and angle <= 175 pwm = GPIO.PWM(servo, 50) pwm.start(8) dutyCycle = angle / 18. + 3. pwm.ChangeDutyCycle(dutyCycle) sleep(0.1) pwm.stop() faceCascade = cv2.CascadeClassifier('Cascades/haarcascade_frontalface_default.xml') cap = cv2.VideoCapture(0) cap.set(3,160) # set Width cap.set(4,120) # set Height AngleX=90 AngleY=90 setServoAngle(tilt, AngleX) setServoAngle(pan, AngleY) while True: ret, img = cap.read() #img = cv2.flip(img, -1) gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) faces = faceCascade.detectMultiScale( gray, scaleFactor=1.2, minNeighbors=3, minSize=(5, 5) ) faceX=0 faceY=0 faceW=0 faceH=0 for (x,y,w,h) in faces: if(w*h>faceW*faceH): faceX=x faceY=y faceW=w faceH=h if(faceW*faceH>0): cv2.rectangle(img,(faceX,faceY),(faceX+faceW,faceY+faceH),(255,0,0),2) roi_gray = gray[y:faceY+faceH, x:faceX+faceW] roi_color = img[y:faceY+faceH, x:faceX+faceW] faceX=faceX+faceW/2 faceY=faceY+faceH/2 if(faceX>90): AngleX-=1 if(faceX<70): AngleX+=1 if(AngleX>140): AngleX=140 if(AngleX<30): AngleX=30 if(faceY>70): AngleY-=1 if(faceY<50): AngleY+=1 if(AngleY>140): AngleY=140 if(AngleY<30): AngleY=30 setServoAngle(tilt, AngleX) setServoAngle(pan, AngleY) cv2.imshow('video',img) print(faceX) print(faceY) k = cv2.waitKey(30) & 0xff if k == 27: # press 'ESC' to quit break cap.release() cv2.destroyAllWindows() [/mw_shl_code] ———————————————— 2、CascadeClassifier检测void CascadeClassifier::detectMultiScale( const Mat& image, vector<Rect>& objects, double scaleFactor, int minNeighbors, int flags, Size minObjectSize, Size maxObjectSize) { vector<int> fakeLevels; vector<double> fakeWeights; detectMultiScale( image, objects, fakeLevels, fakeWeights, scaleFactor, minNeighbors, flags, minObjectSize, maxObjectSize, false ); } 参数意思: 1. const Mat& image:输入图像 2. vector& objects:输出的矩形向量组 3. double scaleFactor=1.1:这个是每次缩小图像的比例,默认是1.1 4. minNeighbors=3:匹配成功所需要的周围矩形框的数目,每一个特征匹配到的区域都是一个矩形框,只有多个矩形框同时存在的时候,才认为是匹配成功,比如人脸,这个默认值是3。 5. flags=0:可以取如下这些值: CASCADE_DO_CANNY_PRUNING=1, 利用canny边缘检测来排除一些边缘很少或者很多的图像区域 CASCADE_SCALE_IMAGE=2, 正常比例检测 CASCADE_FIND_BIGGEST_OBJECT=4, 只检测最大的物体 CASCADE_DO_ROUGH_SEARCH=8 初略的检测 6. minObjectSize maxObjectSize:匹配物体的大小范围 ———————————————— |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






