|
19579| 29
|
[MP动手做] MicroPython动手做(26)——物联网之OneNET |
|
1、物联网(Internet of Things,缩写:IoT) 是基于互联网、传统电信网等信息承载体,让所有能行使独立功能的普通物体实现互联互通的网络。其应用领域主要包括运输和物流、工业制造、健康医疗、智能环境(家庭、办公、工厂)等,具有十分广阔的市场前景。 物联网的概念最早是在1999年由Kevin Ashton在一次演讲中提出来的,当时他是一个RFID研究机构的执行主任,这家研究机构是在宝洁公司和吉列公司的赞助下成立的。而他本人也因此被称为物联网之父。随后麻省理工学院的Neil Gershenfeld教授出版了一本名为《When things Start to Think》的书。以这些为标志,正式揭开了物联网的序幕。 物联网的英文是Internet of Things,缩写为IoT。这里的“物”指的是我身边一切能与网络联通的物品。例如你带的手表、你骑的共享单车、马路上的汽车、家里的冰箱、路边的路灯、甚至是一棵树。只要一件物品能够与网络相连,它就都是物联网中的“物”。而所谓物联网,就是“物”与人,以及“物”与“物”之间,通过网络来传递和处理信息。  |
|
6、通过OneNET平台控制小车的进退左右 [mw_shl_code=python,false]#MicroPython动手做(26)——物联网之OneNET #通过OneNET平台控制小车的进退左右 from mpython import * import network my_wifi = wifi() my_wifi.connectWiFi('zh', 'zy1567') import music import time from umqtt.simple import MQTTClient from machine import Timer import machine import ubinascii def OneNET_recv(_msg):pass _OneNET_msg_list = [] def OneNET_callback(_topic, _msg): global _OneNET_msg_list try: _msg = _msg.decode('utf-8', 'ignore') except: print(_msg);return OneNET_recv(_msg) if _msg in _OneNET_msg_list: eval('OneNET_recv_' + bytes.decode(ubinascii.hexlify(_msg)) + '()') tim14 = Timer(14) _iot_count = 0 def timer14_tick(_): global _iot, _iot_count _iot_count = _iot_count + 1 if _iot_count == 1000: _iot.ping(); _iot_count = 0 try: _iot.check_msg() except: machine.reset() _iot = None def OneNET_setup(): global _iot _iot = MQTTClient('600999469', '183.230.40.39', 6002, '350265', 'l6S0BsjGXsQACV3hBhml7=3pwCo=', keepalive=300) _iot.set_callback(OneNET_callback) if 1 == _iot.connect(): print('Successfully connected to MQTT server.') tim14.init(period=200, mode=Timer.PERIODIC, callback=timer14_tick) import parrot def forward(): parrot.set_speed(parrot.MOTOR_1, 80) parrot.set_speed(parrot.MOTOR_2, 80) oled.fill(0) oled.blit(image_picture.load('face/Information/Forward.pbm', 0), 32, 0) oled.show() def retreat(): parrot.set_speed(parrot.MOTOR_1, -80) parrot.set_speed(parrot.MOTOR_2, -80) oled.fill(0) oled.blit(image_picture.load('face/Information/Backward.pbm', 0), 32, 0) oled.show() def right(): parrot.set_speed(parrot.MOTOR_1, 80) parrot.set_speed(parrot.MOTOR_2, -0) oled.fill(0) oled.blit(image_picture.load('face/Information/Right.pbm', 0), 32, 0) oled.show() def Left(): parrot.set_speed(parrot.MOTOR_1, -0) oled.fill(0) oled.blit(image_picture.load('face/Information/Left.pbm', 0), 32, 0) oled.show() _OneNET_msg_list.append('进') def OneNET_recv_e8bf9b(): rgb.fill((int(0), int(102), int(0))) rgb.write() time.sleep_ms(1) forward() _OneNET_msg_list.append('退') def OneNET_recv_e98080(): rgb.fill((int(51), int(102), int(255))) rgb.write() time.sleep_ms(1) retreat() _OneNET_msg_list.append('左') def OneNET_recv_e5b7a6(): rgb[0] = (int(0), int(102), int(0)) rgb.write() time.sleep_ms(1) Left() _OneNET_msg_list.append('右') def OneNET_recv_e58fb3(): rgb[2] = (int(0), int(102), int(0)) rgb.write() time.sleep_ms(1) right() image_picture = Image() oled.fill(0) oled.DispChar(' 请准备好物联网控制', 0, 16, 1) oled.show() music.play('G5:1') rgb[1] = (int(255), int(0), int(0)) rgb.write() time.sleep_ms(1) OneNET_setup() while True: oled.fill(0) parrot.set_speed(parrot.MOTOR_1, 0) parrot.set_speed(parrot.MOTOR_2, 0) rgb.fill( (0, 0, 0) ) rgb.write() time.sleep_ms(1) oled.show() time.sleep(2)[/mw_shl_code] |
|
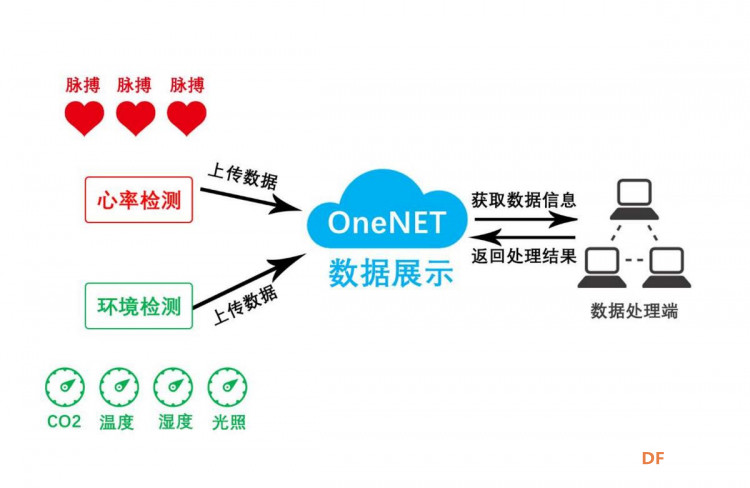
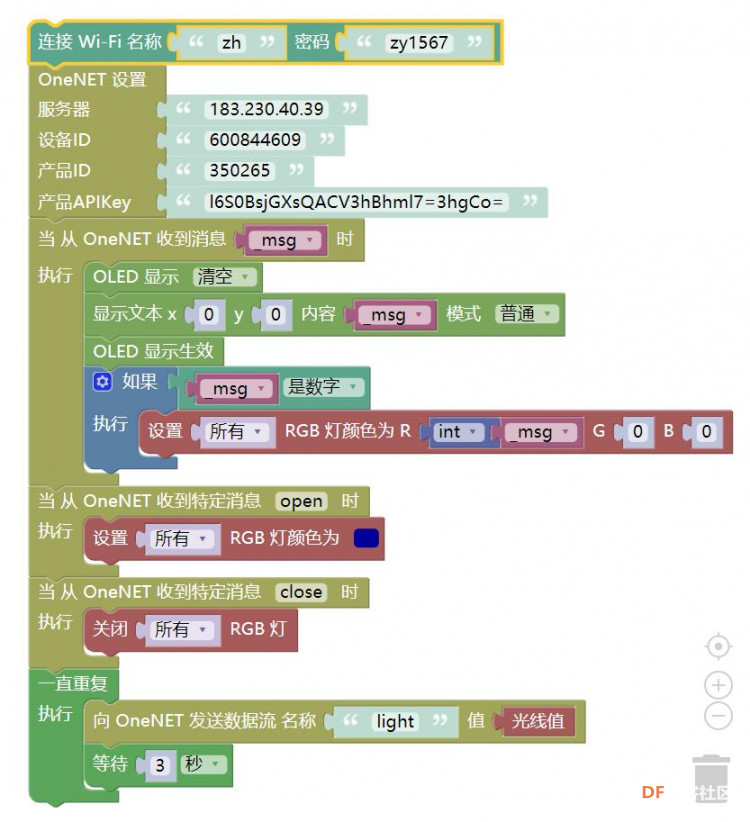
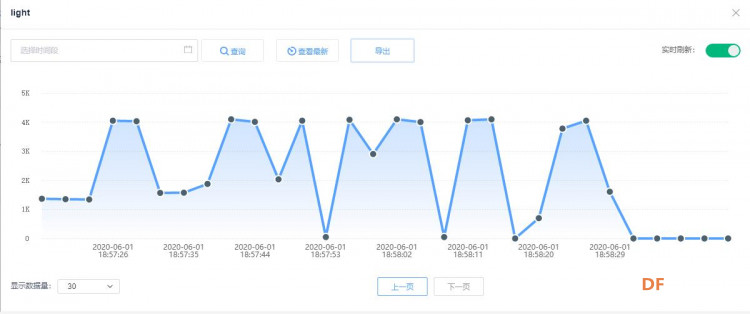
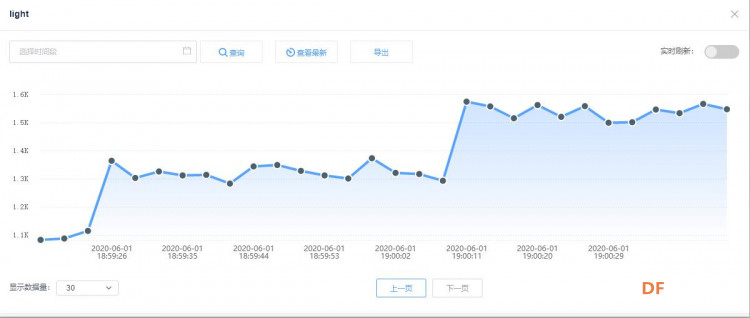
5、在电脑查看掌控板实时的光线值 掌控板上显示电脑上发送的命令(字符串),并点亮红色灯;当发送“open”命令时,掌控板传送“光线值”的数据流到电脑,并点亮蓝色灯,发送“close”,蓝灯熄灭。 [mw_shl_code=python,false]#MicroPython动手做(26)——物联网之OneNET #在电脑查看掌控板实时的光线值 from mpython import * import network from umqtt.simple import MQTTClient from machine import Timer import machine import ubinascii import time import json my_wifi = wifi() my_wifi.connectWiFi("zh", "zy1567") def OneNET_recv(_msg):pass _OneNET_msg_list = [] def OneNET_callback(_topic, _msg): global _OneNET_msg_list try: _msg = _msg.decode('utf-8', 'ignore') except: print(_msg);return OneNET_recv(_msg) if _msg in _OneNET_msg_list: eval('OneNET_recv_' + bytes.decode(ubinascii.hexlify(_msg)) + '()') tim14 = Timer(14) _iot_count = 0 def timer14_tick(_): global _iot, _iot_count _iot_count = _iot_count + 1 if _iot_count == 1000: _iot.ping(); _iot_count = 0 try: _iot.check_msg() except: machine.reset() _iot = None def OneNET_setup(): global _iot _iot = MQTTClient("600844609", "183.230.40.39", 6002, "350265", "l6S0BsjGXsQACV3hBhml7=3hgCo=", keepalive=300) _iot.set_callback(OneNET_callback) if 1 == _iot.connect(): print('Successfully connected to MQTT server.') tim14.init(period=200, mode=Timer.PERIODIC, callback=timer14_tick) def pubdata(_dic): print(_dic) _list = [] for _key in list(_dic.keys()): _d = {'id':_key,'datapoints':[{'value':_dic[_key]}]} _list.append(_d) _data = {'datastreams': _list} j_d = json.dumps(_data) j_l = len(j_d) arr = bytearray(j_l + 3) arr[0] = 1 arr[1] = int(j_l / 256) arr[2] = j_l % 256 arr[3:] = j_d.encode('ascii') return arr def OneNET_recv(_msg): oled.fill(0) oled.DispChar(_msg, 0, 0, 1) oled.show() if _msg.isdigit(): rgb.fill( (int((int(_msg))), int(0), int(0)) ) rgb.write() time.sleep_ms(1) _OneNET_msg_list.append('open') def OneNET_recv_6f70656e(): rgb.fill((int(0), int(0), int(153))) rgb.write() time.sleep_ms(1) _OneNET_msg_list.append('close') def OneNET_recv_636c6f7365(): rgb.fill( (0, 0, 0) ) rgb.write() time.sleep_ms(1) OneNET_setup() while True: _iot.publish('$dp', pubdata({"light":light.read()})) time.sleep(3)[/mw_shl_code] |
|
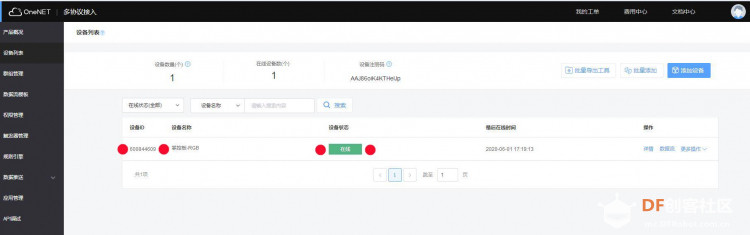
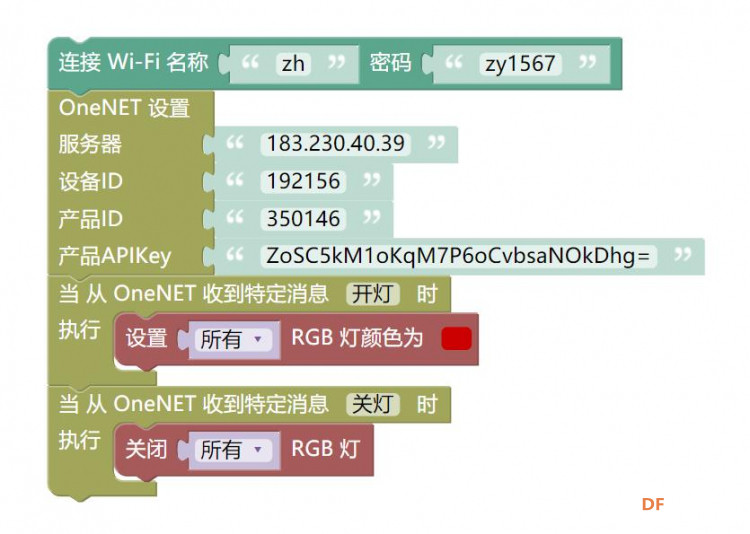
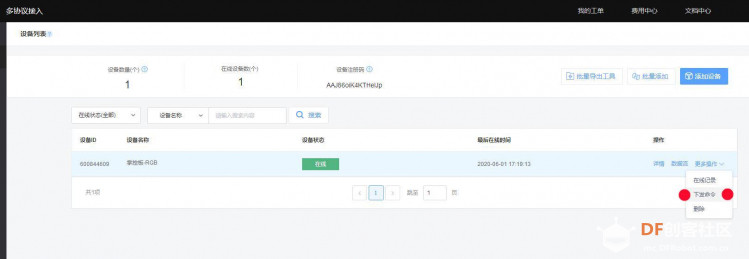
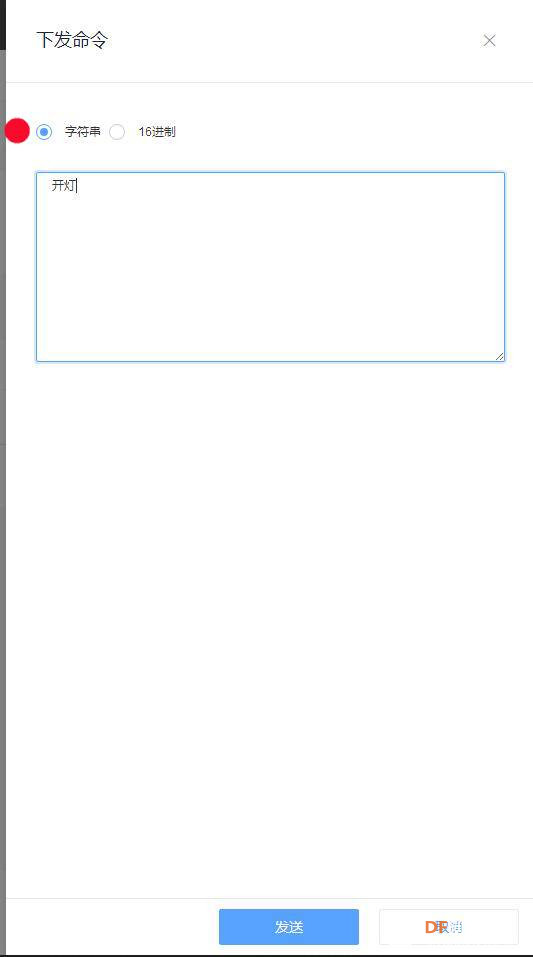
4、OneNET平台控制远程RGB灯 服务器地址不用修改,按照上述查看设备ID、产品ID、产品APIKey的方式找到这三项,并将其粘贴到对应程序位置。 当OneNET收到特定消息“开灯”时,3个LED灯显示红色;当OneNET收到特定消息 “关灯”时,3个LED灯显示熄灭。 [mw_shl_code=python,false]#MicroPython动手做(26)——物联网之OneNET #OneNET平台控制远程RGB灯 from mpython import * import network from umqtt.simple import MQTTClient from machine import Timer import machine import ubinascii import time my_wifi = wifi() my_wifi.connectWiFi("zh", "zy1567") def OneNET_recv(_msg):pass _OneNET_msg_list = [] def OneNET_callback(_topic, _msg): global _OneNET_msg_list try: _msg = _msg.decode('utf-8', 'ignore') except: print(_msg);return OneNET_recv(_msg) if _msg in _OneNET_msg_list: eval('OneNET_recv_' + bytes.decode(ubinascii.hexlify(_msg)) + '()') tim14 = Timer(14) _iot_count = 0 def timer14_tick(_): global _iot, _iot_count _iot_count = _iot_count + 1 if _iot_count == 1000: _iot.ping(); _iot_count = 0 try: _iot.check_msg() except: machine.reset() _iot = None def OneNET_setup(): global _iot _iot = MQTTClient("192156", "183.230.40.39", 6002, "350146", "ZoSC5kM1oKqM7P6oCvbsaNOkDhg=", keepalive=300) _iot.set_callback(OneNET_callback) if 1 == _iot.connect(): print('Successfully connected to MQTT server.') tim14.init(period=200, mode=Timer.PERIODIC, callback=timer14_tick) _OneNET_msg_list.append('开灯') def OneNET_recv_e5bc80e781af(): rgb.fill((int(204), int(0), int(0))) rgb.write() time.sleep_ms(1) _OneNET_msg_list.append('关灯') def OneNET_recv_e585b3e781af(): rgb.fill( (0, 0, 0) ) rgb.write() time.sleep_ms(1) OneNET_setup()[/mw_shl_code] |
|
物联网的基本特征从通信对象和过程来看,物与物、人与物之间的信息交互是物联网的核心。物联网的基本特征可概括为整体感知、可靠传输和智能处理 。整体感知—可以利用射频识别、二维码、智能传感器等感知设备感知获取物体的各类信息。可靠传输—通过对互联网、无线网络的融合,将物体的信息实时、准确地传送,以便信息交流、分享。 智能处理—使用各种智能技术,对感知和传送到的数据、信息进行分析处理,实现监测与控制的智能化。根据物联网的以上特征,结合信息科学的观点,围绕信息的流动过程,可以归纳出物联网处理信息的功能: (1)获取信息的功能。主要是信息的感知、识别,信息的感知是指对事物属性状态及其变化方式的知觉和敏感;信息的识别指能把所感受到的事物状态用一定方式表示出来。 (2)传送信息的功能。主要是信息发送、传输、接收等环节,最后把获取的事物状态信息及其变化的方式从时间(或空间)上的一点传送到另一点的任务,这就是常说的通信过程。 (3)处理信息的功能。是指信息的加工过程,利用已有的信息或感知的信息产生新的信息,实际是制定决策的过程。 (4)施效信息的功能。指信息最终发挥效用的过程,有很多的表现形式,比较重要的是通过调节对象事物的状态及其变换方式,始终使对象处于预先设计的状态 。 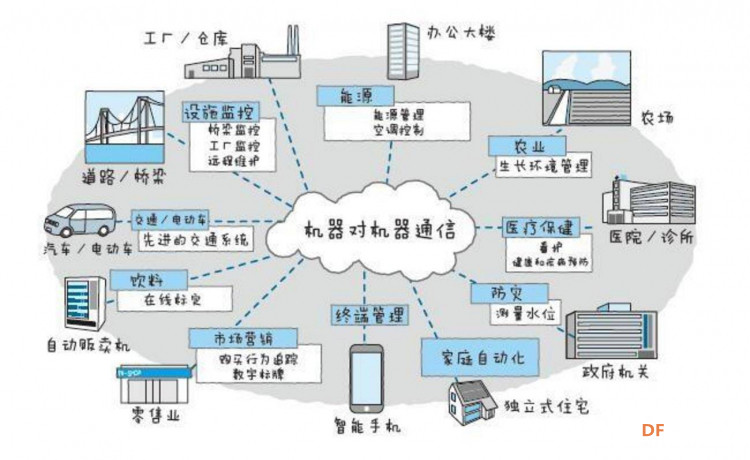 |
|
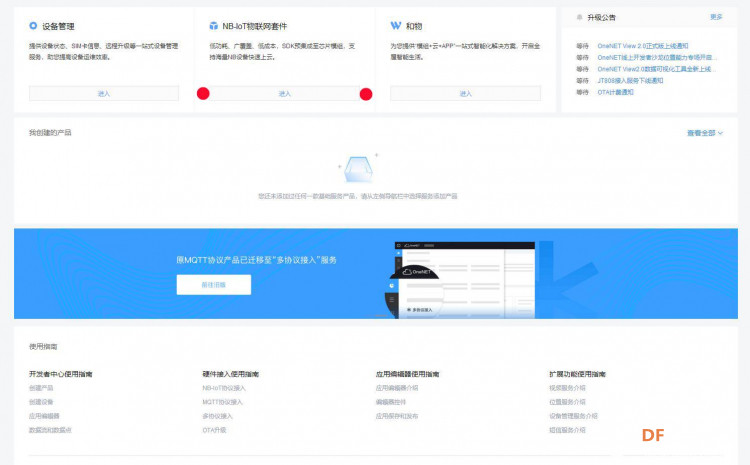
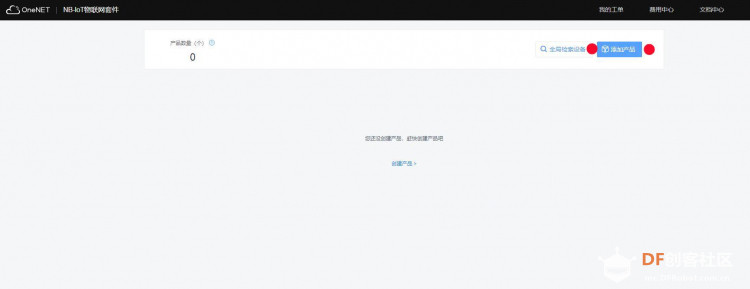
2、OneNET平台 是由中国移动打造的PaaS物联网开放平台。平台能够帮助开发者轻松实现设备接入与设备连接,快速完成产品开发部署,为智能硬件、智能家居产品提供完善的物联网解决方案。OneNET平台作为连接和数据的中心,能适应各种传感网络和通信网络,将面向智能家居、可穿戴设备、车联网、移动健康、智能创客等多个领域开放。 中移OneNET,将数据传输协议、数据储存格式等中间层的东西标准化,形成一个统一、开源的设备云平台,标准化、简约化、集成化,减少企业负担的同时为下一阶段的大数据分析提供基础条件。 核心能力输出 OneNET作为设备连接和数据的中心,面向物联网产业上下游企业提供标准化接入和定制化开发,具体能力输出包含2个方面: 1. 硬件侧:平台适配各种网络环境、兼容国内外主流通信协议,定制化支撑私有通信协议,以及完备的SDK包,可支持各类传感器和智能硬件的快速接入和可控触发控制;还提供对智能硬件的网络状态、终端状态、流量情况、位置信息进行全面的管理和监控; 2. 软件侧:平台通过丰富的API、应用孵化器、轻应用行业模板支持各类智能硬件和行业应用的图形化展示、SaaS层软件开发,满足物联网领域数据存储、数据安全、大数据分析等平台级服务需求。 OneNET平台在提供设备连接服务和数据中心服务的基础上进行开放合作,面向智能硬件创客和创业型企业推出硬件社区服务(包括硬件集市、双创云等),以及数据展现、数据分析和应用生成服务;面向重点行业领域/大客户推出行业PaaS服务和提供行业应用定制化开发服务。 IoT PaaS基础能力:提供智能设备自助开发工具、后台技术支持服务、物联网专网、短彩信、位置定位、设备管理、消息分发、远程升级等基础服务 SaaS业务服务:提供第三方应用开发平台,快速实现不同业务需求,借助轻应用孵化器快速搭建Web和APP应用 IoT数据云:提供高扩展的数据库、实时数据处理、智能预测离线数据分析、数据可视化展示等多维度的业务运营服务 开发者社区:高频的开发者社区,汇聚着不同的知识源,集合更多的物联网爱好者,让项目与开发成果开始传播  |
 OneNET八大功能 专网专号:中国移动基于物联网特点打造的专业化网络通道,提供“云-管-端”一体化的智能管道和支撑系统,支持工业级、车规级的专网卡和通信模组; 海量连接:基于多类型标准协议和API开发满足海量设备的高并发快速接入; 在线监控:实现终端设备的监控管理、在线调试、实时控制功能; 数据存储:基于分布式云存储、消息对象结构、丰富的数据调用接口实现数据高并发读、写库操作,有效保障数据的安全; 消息分发:将采集的各类数据通过消息转发、短彩信推送、APP信息推送方式快速告知业务平台、用户手机、APP客户端,建立双向通信的有效通道; 能力输出:汇聚中国移动短彩信、位置服务、视频服务、公有云等核心能力,提供标准API接口,缩短终端与应用的开发周期; 事件告警:打造事件触发引擎,用户可以基于引擎快速实现应用逻辑编排; 数据分析:基于Hadoop等提供统一的数据管理与分析能力。 OneNET应用领域 OneNET物联网专网已经应用于环境监控、远程抄表、智慧农业、智能家电、智能硬件、节能减排、车联网、工业控制、物流跟踪等多种商业领域。 物联网开放平台OneNET通过打造接入平台、能力平台、大数据平台能力满足物联网领域设备连接、协议适配、数据存储、数据安全、大数据分析等平台级服务需求。  |
|
烧入程序之后,不知哪里出错.......连不上平台 串口输出: Traceback (most recent call last): File "main.py", line 54, in <module> File "main.py", line 38, in OneNET_setup File "umqtt/simple.py", line 99, in connect MQTTException: 4 MicroPython v2.0.1-18-gbe8fbdd-dirty on 2020-04-24; mpython with ESP32 屏显  |
|
相关参考使用文档 多协议接入 https://open.iot.10086.cn/doc/multiprotocol/#多协议接入 MQTT物联网套件 https://open.iot.10086.cn/doc/mqtt/  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






