|
|
[MP动手做] MicroPython动手做(26)——物联网之OneNET |
|
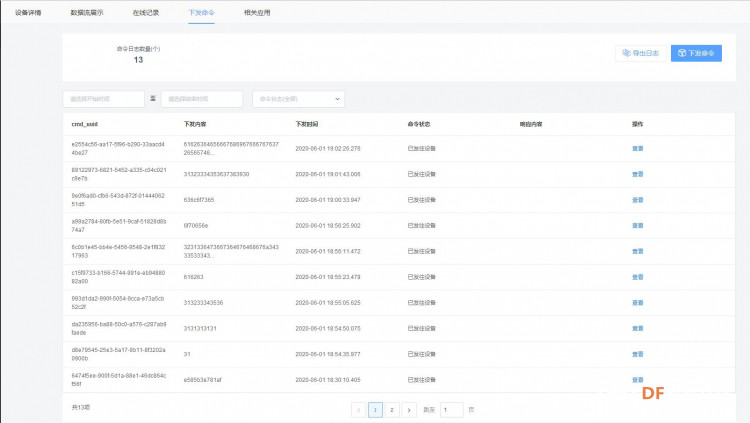
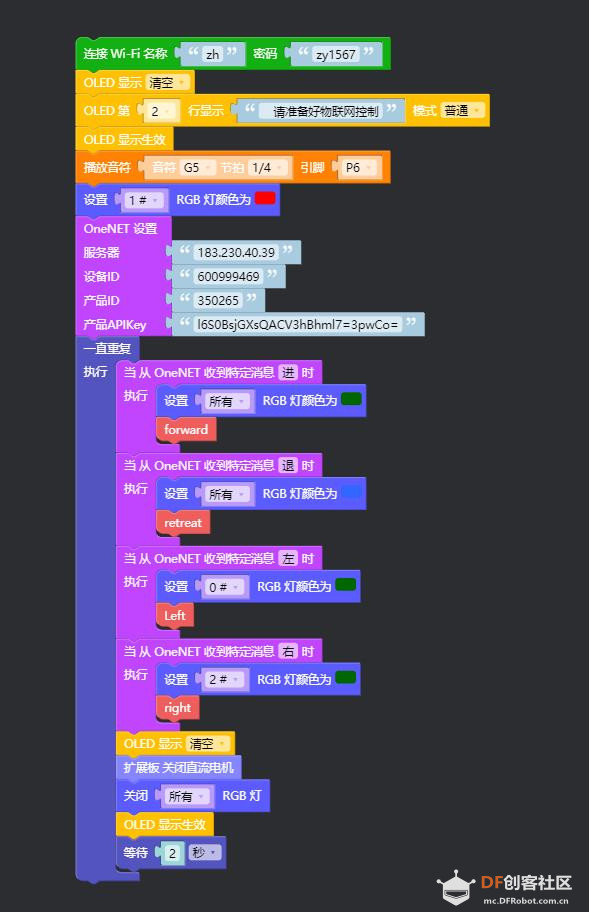
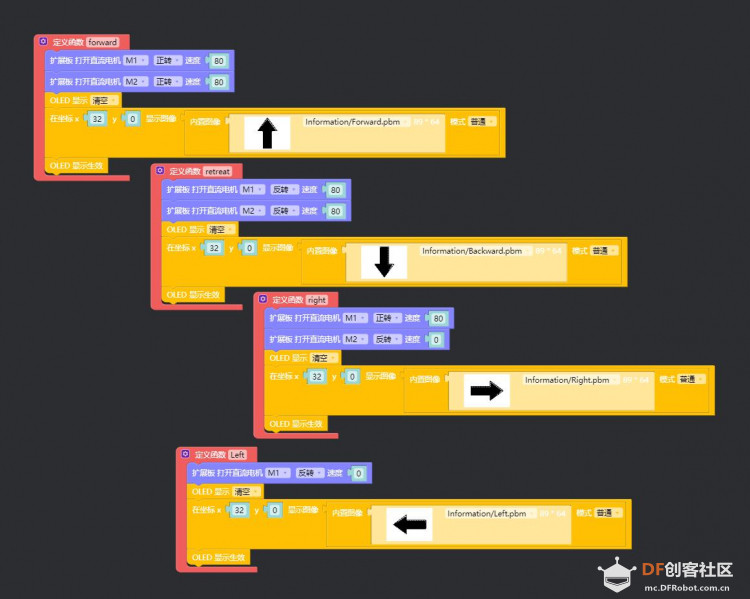
6、通过OneNET平台控制小车的进退左右 [mw_shl_code=python,false]#MicroPython动手做(26)——物联网之OneNET #通过OneNET平台控制小车的进退左右 from mpython import * import network my_wifi = wifi() my_wifi.connectWiFi('zh', 'zy1567') import music import time from umqtt.simple import MQTTClient from machine import Timer import machine import ubinascii def OneNET_recv(_msg):pass _OneNET_msg_list = [] def OneNET_callback(_topic, _msg): global _OneNET_msg_list try: _msg = _msg.decode('utf-8', 'ignore') except: print(_msg);return OneNET_recv(_msg) if _msg in _OneNET_msg_list: eval('OneNET_recv_' + bytes.decode(ubinascii.hexlify(_msg)) + '()') tim14 = Timer(14) _iot_count = 0 def timer14_tick(_): global _iot, _iot_count _iot_count = _iot_count + 1 if _iot_count == 1000: _iot.ping(); _iot_count = 0 try: _iot.check_msg() except: machine.reset() _iot = None def OneNET_setup(): global _iot _iot = MQTTClient('600999469', '183.230.40.39', 6002, '350265', 'l6S0BsjGXsQACV3hBhml7=3pwCo=', keepalive=300) _iot.set_callback(OneNET_callback) if 1 == _iot.connect(): print('Successfully connected to MQTT server.') tim14.init(period=200, mode=Timer.PERIODIC, callback=timer14_tick) import parrot def forward(): parrot.set_speed(parrot.MOTOR_1, 80) parrot.set_speed(parrot.MOTOR_2, 80) oled.fill(0) oled.blit(image_picture.load('face/Information/Forward.pbm', 0), 32, 0) oled.show() def retreat(): parrot.set_speed(parrot.MOTOR_1, -80) parrot.set_speed(parrot.MOTOR_2, -80) oled.fill(0) oled.blit(image_picture.load('face/Information/Backward.pbm', 0), 32, 0) oled.show() def right(): parrot.set_speed(parrot.MOTOR_1, 80) parrot.set_speed(parrot.MOTOR_2, -0) oled.fill(0) oled.blit(image_picture.load('face/Information/Right.pbm', 0), 32, 0) oled.show() def Left(): parrot.set_speed(parrot.MOTOR_1, -0) oled.fill(0) oled.blit(image_picture.load('face/Information/Left.pbm', 0), 32, 0) oled.show() _OneNET_msg_list.append('进') def OneNET_recv_e8bf9b(): rgb.fill((int(0), int(102), int(0))) rgb.write() time.sleep_ms(1) forward() _OneNET_msg_list.append('退') def OneNET_recv_e98080(): rgb.fill((int(51), int(102), int(255))) rgb.write() time.sleep_ms(1) retreat() _OneNET_msg_list.append('左') def OneNET_recv_e5b7a6(): rgb[0] = (int(0), int(102), int(0)) rgb.write() time.sleep_ms(1) Left() _OneNET_msg_list.append('右') def OneNET_recv_e58fb3(): rgb[2] = (int(0), int(102), int(0)) rgb.write() time.sleep_ms(1) right() image_picture = Image() oled.fill(0) oled.DispChar(' 请准备好物联网控制', 0, 16, 1) oled.show() music.play('G5:1') rgb[1] = (int(255), int(0), int(0)) rgb.write() time.sleep_ms(1) OneNET_setup() while True: oled.fill(0) parrot.set_speed(parrot.MOTOR_1, 0) parrot.set_speed(parrot.MOTOR_2, 0) rgb.fill( (0, 0, 0) ) rgb.write() time.sleep_ms(1) oled.show() time.sleep(2)[/mw_shl_code] |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed






 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






