|
61242| 15
|
[进阶] 使用SIM808 with Leonardo mainboard实现远程定位 |
|
今天教大家一个SIM808 with Leonardo mainboard实现远程定位的方法!具体实现是基于中国移动物联网开放平台(OneNet)及GPRS通信。具体实现原理为: 通过给SIM808 with Leonardo mainboard编程使其上传GPS数据至OneNet平台,计算机软件通过从OneNet平台获取GPS数据并处理后在地图上显示板子所在位置。 好的,其它废话就不多说啦!大家按照如下步骤一步一步来就行了......... 第一步,按照如下方法在OneNet平台创建一个转发设备 1、浏览器打开https://open.iot.10086.cn注册一个账号,注册后重新打开链接。 2、点击右上角“项目管理”进入页面后找到“新建项目”并单击进入如下页面。 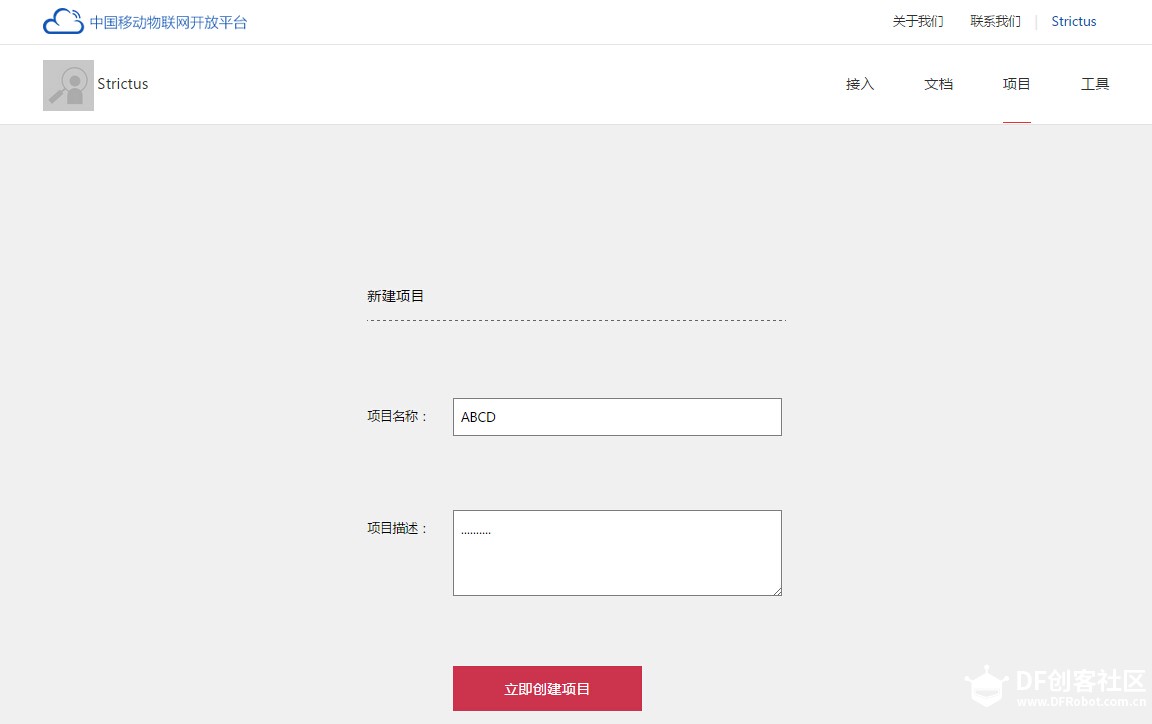 3、在如上页面中输入项目名"ABCD",点击“立即创建项目”进入如下页面  4、点击“为你的项目添加一个设备”进入如下页面 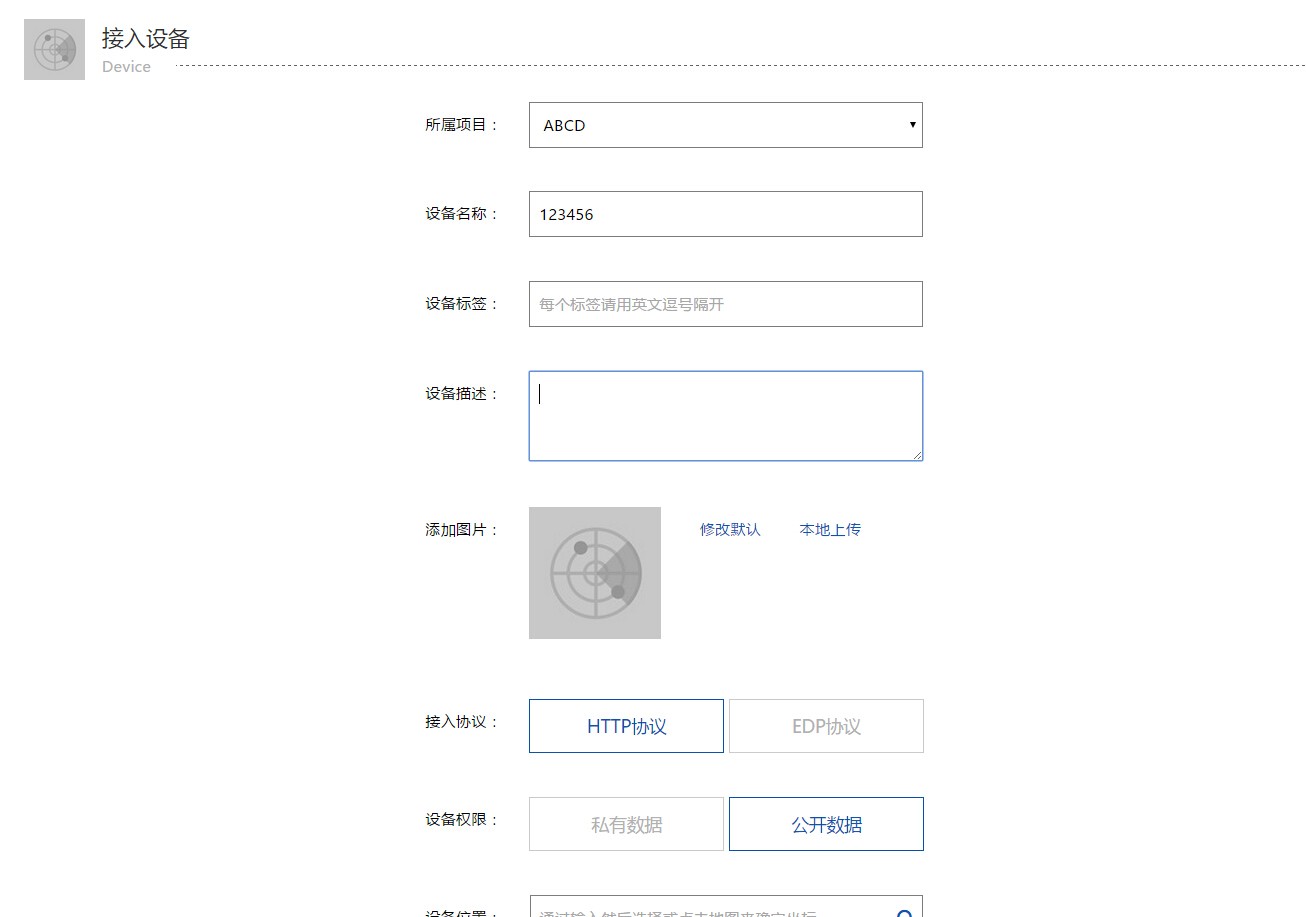 5、在“设备名称”栏输入设备名:“123456”  6、继续下拉页面至地图,使用鼠标单击地图以设置设备位置,设置好后点击“添加设备”完成设备的创建 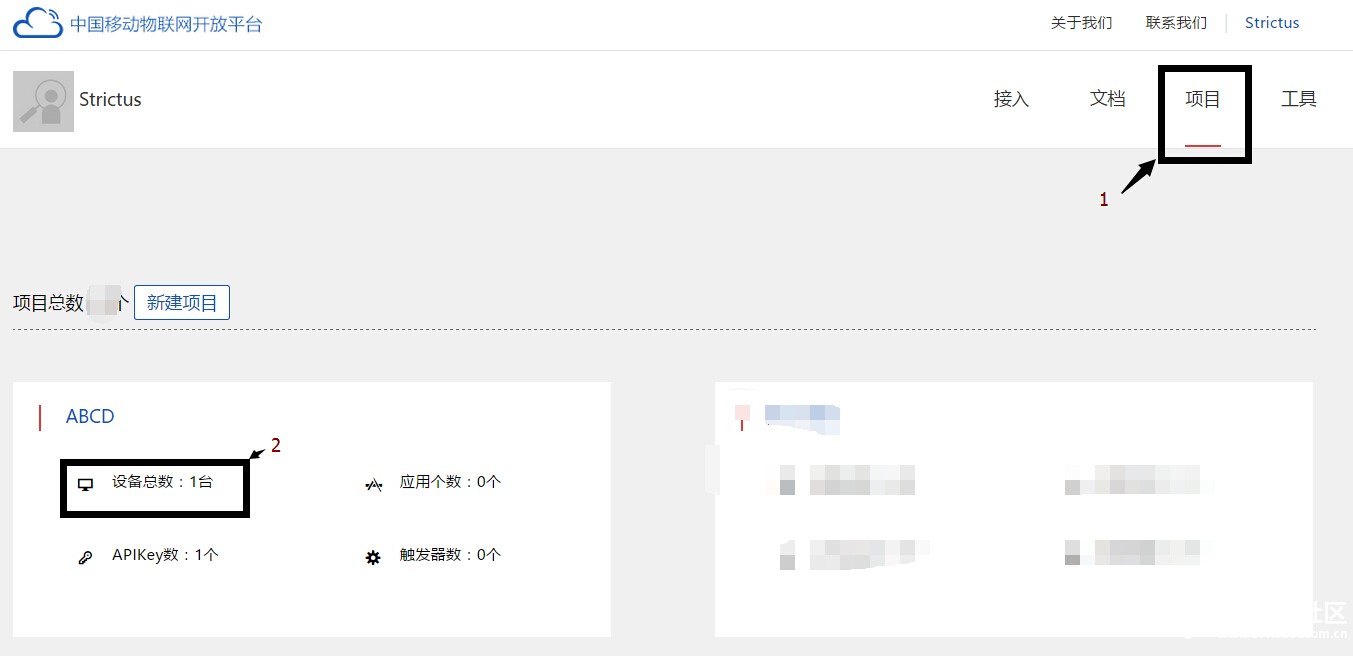 7、返回“项目管理”(如上图)并点击选择“ABCD”的项目进入如下页面 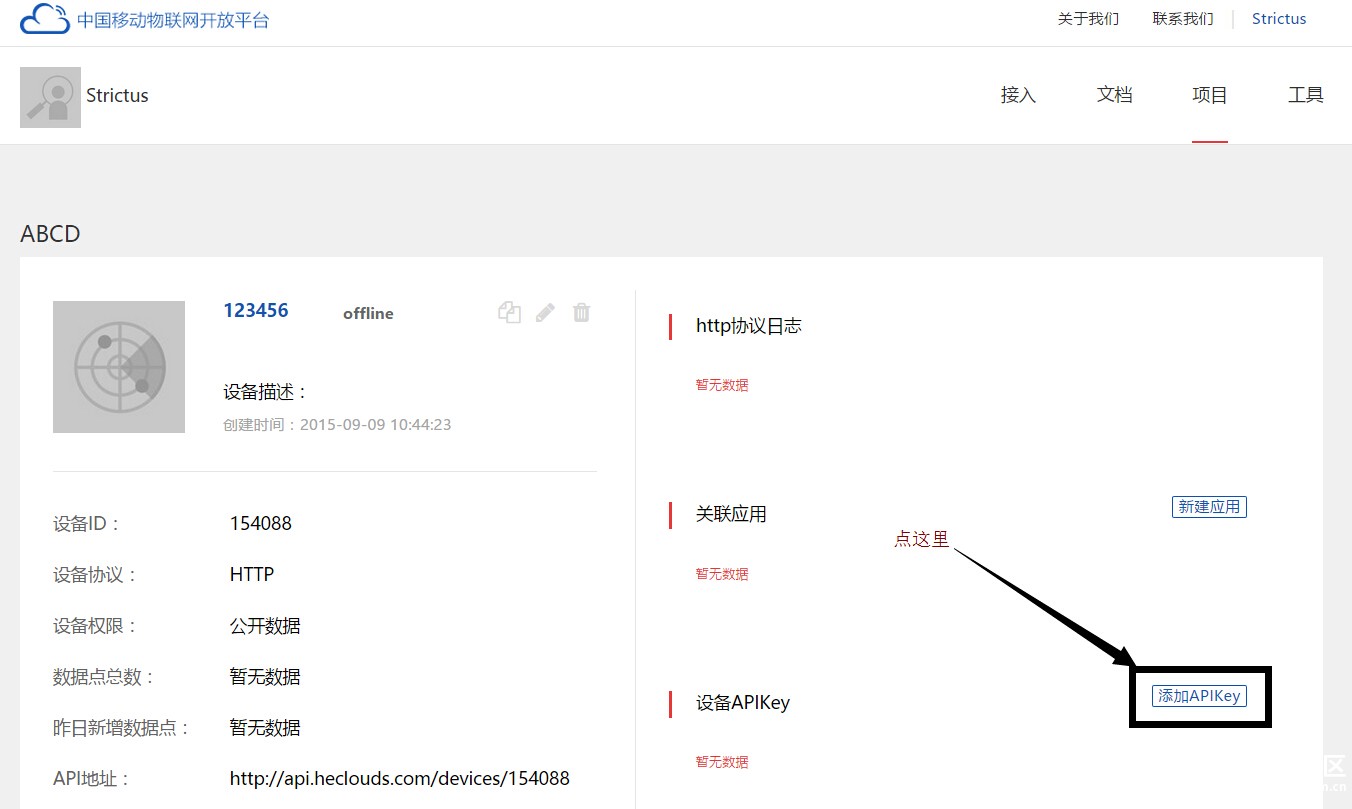 8、点击“添加APIKey”进入如下页面并按如图注释创建一个名称为“TEST APIKey”的API密钥 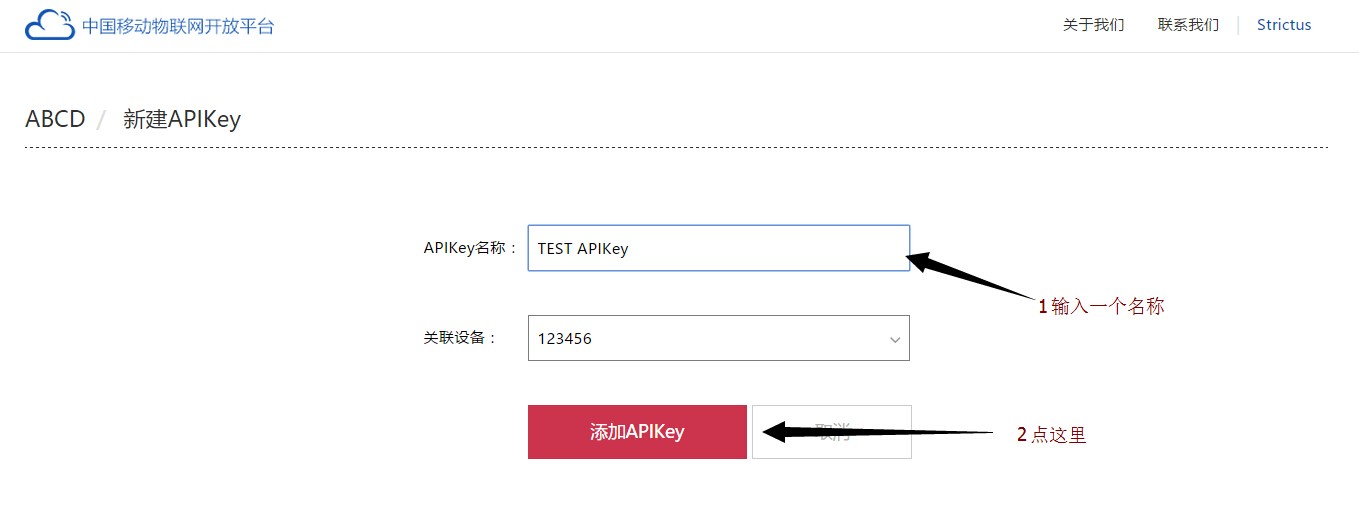 至此,我们就已经完成了在OneNet平台的转发设备的创建! 第二步、使用SIM808 with Leonardo mainboard将GPS数据发送到OneNet: 1、将下面的代码粘贴到Arduino IDE编译后下载到板//*********************************************File Start*******************************************// #include <TimerOne.h> #include <string.h> #define Success 1U #define Failure 0U const unsigned int bufferLength=600; char RxBuffer[bufferLength]; unsigned int ii=0; int L = 13; const char datastreams_id[]="GPS_Data";//-------------------------设置转发名称 const char device_id[]="154088";//----------------------------------修改此处为"设备ID" const char api_key[] ="wdovZ5BMOSDNZZAg2a2eI7bCbBAA";//--修改此处为"设备APIKey" struct { unsigned char CMD; unsigned int LengthA; char fixed[20]; unsigned char id_length; char id[20]; unsigned char LengthB1; unsigned char LengthB2; char api_key[50]; }login; struct { unsigned char CMD; unsigned char LengthA; unsigned char mark; unsigned char type; unsigned char LengthB1; unsigned char LengthB2; char streamA[24]; char id[20]; char streamB[27]; char GPS_Buffer[150]; char streamC[7]; }Save_Data; unsigned char mystrstr(char *s,char *t,unsigned int Length_s,unsigned int Length_t) { char x=0;char *p;p=t; int i=0,j=0; for(;i < Length_s; s++,i++) { while(*t == *s) { s++;t++;i++;j++; if (j>= Length_t) return 1; } s-=j; t=p;j=0; } return NULL; } void clrRxBuffer(void) { memset(RxBuffer,0,bufferLength); ii=0; } void SIM808_ERROR(void) { while(1) { digitalWrite(L, HIGH); delay(300); digitalWrite(L, LOW); delay(300); } } unsigned long Time_Cont=0; void Timer1_handler(void) { Time_Cont++; } unsigned int Send_Command(char *Command,char *Response,unsigned int Res_Length,unsigned long Timeout,unsigned char Retry) { clrRxBuffer(); for(unsigned char n=0;n<Retry;n++) { Serial1.write(Command); Serial1.write("\r\n"); Time_Cont=0; while(Time_Cont<Timeout) { readBuffer(); if((mystrstr(RxBuffer,Response,ii,Res_Length))!=NULL) { clrRxBuffer(); return Success; } } Time_Cont=0; } clrRxBuffer(); return Failure; } char EER_GPS_Buffer[24]={"$GPRMC,,V,,,,,,,,,,N*7F"}; int GET_GPS(void) { char *GPS_BufferHead,*GPS_BufferTail; clrRxBuffer(); if(Send_Command("AT+CGNSTST=1","OK",2,3000,5)==Success); Time_Cont=0; while(Time_Cont<5000) { readBuffer(); if((GPS_BufferHead = strstr(RxBuffer, "$GPRMC,")) != NULL) { if(((GPS_BufferTail = strstr(GPS_BufferHead,"\r\n")) != NULL)&&(GPS_BufferTail >GPS_BufferHead)){ memcpy(Save_Data.GPS_Buffer,GPS_BufferHead,GPS_BufferTail-GPS_BufferHead); clrRxBuffer(); break; } } memcpy(Save_Data.GPS_Buffer,EER_GPS_Buffer,24); } Time_Cont=0; clrRxBuffer(); if(Send_Command("AT+CGNSTST=0","OK",2,5000,10)==Success) ; } void SIM808_Initialization() { if(Send_Command("AT","OK",2,3000,10)==Success); else SIM808_ERROR(); if(Send_Command("ATE0","OK",2,3000,10)==Success); else SIM808_ERROR(); if(Send_Command("AT+CREG?","+CREG: 0,1",10,2000,20)==Success); else SIM808_ERROR(); if(Send_Command("AT+CGREG?","+CGREG: 0,1",11,2000,20)==Success) else SIM808_ERROR(); } void SIM808_BOOT() { if(Send_Command("AT","OK",2,100,5)==Success) return; else { digitalWrite(12, HIGH); if(Send_Command("AT","OK",2,1000,20)==Success) {digitalWrite(12, LOW);return;} else { digitalWrite(12, LOW); SIM808_ERROR(); } } } void Process_Save_Data() { } void setup() { Serial1.begin(115200); pinMode(L, OUTPUT); pinMode(12, OUTPUT); Timer1.initialize(1000); Timer1.attachInterrupt(Timer1_handler); // blinkLED to run every 1ms delay(5000); digitalWrite(L, HIGH); SIM808_BOOT(); SIM808_Initialization(); if(Send_Command("AT+CGNSPWR=1","OK",2,3000,2)==Success) ; else SIM808_ERROR(); } const char data[]={0x00,0x03,0x45,0x44,0x50,0x01,0x40,0x01,0x00,0x00}; char response[]={0x20,0x02,0x00,0x00}; char responseX[]={0x0D,0x0A,0x20,0x02,0x00,0x00,0x0D,0x0A,0x3E,0x20}; void loop() { GET_GPS(); if(Send_Command("AT+CIPSTART=\"TCP\",\"183.230.40.39\",\"876\"","CONNECT",7,10000,2)==Success);//Serial.write("BinGo......AT+CIPSTART=\"TCP\"\r\n"); if(Send_Command("AT+CIPSEND",">",1,3000,2)==Success);// Serial.write("BinGo......AT+CIPSEND\r\n"); login.CMD=0x10; login.id_length=strlen(device_id); for(unsigned char i=0;i<10;i++) { login.fixed=data; } strcpy(login.id,device_id); login.LengthB1=0x00; login.LengthB2=strlen(api_key); strcpy(login.api_key,api_key); login.LengthA=login.LengthB2+login.id_length+13; Serial1.write(login.CMD); Serial1.write(login.LengthA); for(unsigned char i=0;i<10;i++) { Serial1.write(login.fixed); } Serial1.write(login.id_length); Serial1.write(login.id); Serial1.write(login.LengthB1); Serial1.write(login.LengthB2); Serial1.write(login.api_key); if(Send_Command("32",response,sizeof(response)/sizeof(char),3000,1)==Success); if(Send_Command("AT+CIPSEND",">",1,2000,1)==Success); Save_Data.CMD=0X80; Save_Data.mark=0x00; Save_Data.type=0x01; Save_Data.LengthB1=0x00; strcpy(Save_Data.streamA,"{\"datastreams\":[{\"id\":\""); strcpy(Save_Data.id,datastreams_id); strcpy(Save_Data.streamB,"\",\"datapoints\":[{\"value\":\""); strcpy(Save_Data.streamC,"\"}]}]}"); Save_Data.LengthB2=strlen((const char *)Save_Data.streamA)+strlen(datastreams_id)+strlen((const char *)Save_Data.streamB)+strlen((const char *)Save_Data.GPS_Buffer)+strlen((const char *)Save_Data.streamC); Save_Data.LengthA=Save_Data.LengthB2+4; Serial1.write(Save_Data.CMD); Serial1.write(Save_Data.LengthA); if(Save_Data.LengthA>127)Serial1.write(0x01); Serial1.write(Save_Data.mark); Serial1.write(Save_Data.type); Serial1.write(Save_Data.LengthB1); Serial1.write(Save_Data.LengthB2); Serial1.write(Save_Data.streamA); Serial1.write(Save_Data.id); Serial1.write(Save_Data.streamB); Serial1.write(Save_Data.GPS_Buffer); Serial1.write(Save_Data.streamC); if(Send_Command("32","SEND OK",7,3000,1)==Success); memset(Save_Data.GPS_Buffer, 0, sizeof Save_Data.GPS_Buffer); clrRxBuffer(); if(Send_Command("AT+CIPCLOSE","CLOSE OK",8,1000,1)==Success); clrRxBuffer(); digitalWrite(L, HIGH); delay(300); digitalWrite(L, LOW); } void readBuffer() { while(Serial1.available()) { RxBuffer[ii++]=Serial1.read(); if(ii==bufferLength)clrRxBuffer(); } } //*********************************************File End*******************************************// 2、下载完成后按照如下方式连接GPS及GSM天线,注意供电方式及NO BAT?的跳线帽切换。 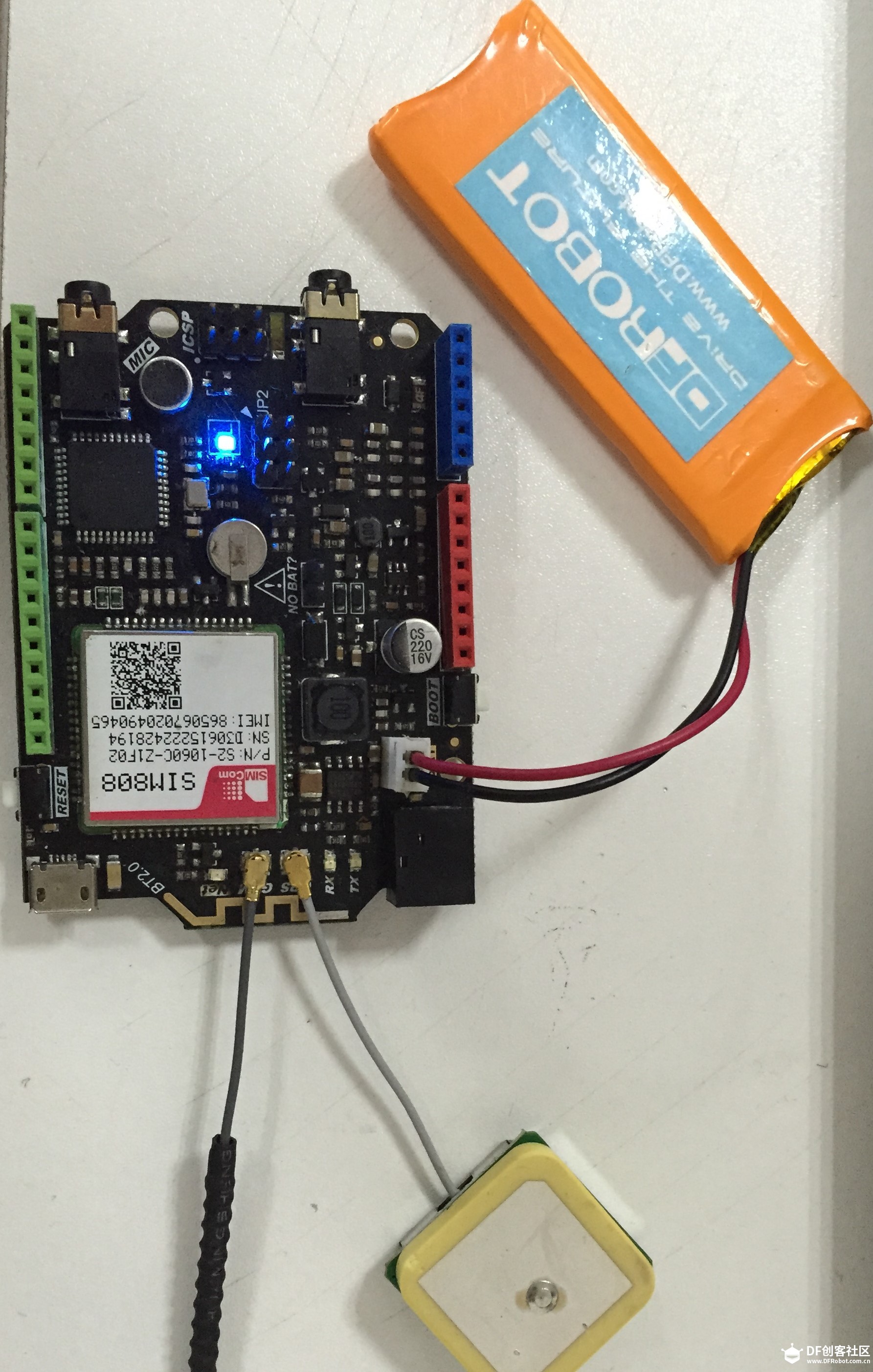 3、程序会自动运行并使模块开机,等待约1分钟后开始将GPS数据上传到OneNet,届时L灯闪烁一次表示数据上传成功一次。 第三步、测试工具软件的使用: 打开工具软件,待地图加载完毕后点击“参数设置”选项卡,并按之前代码中设置的参数值填入图框中的三个文本框。输入完成后点击“连接”按钮开始接收板子上传的数据。 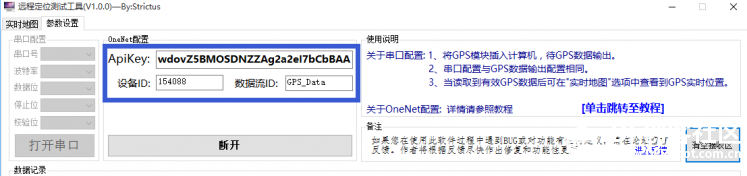 由于天气原因或板子没有放置在露天位置导致GPS未成功定位的时候,软件中的“数据记录”中会显示“GPS数据无效!-----<服务器数据上传时间>20**-**-** **:**:**.***”(如下图)。  当成功定位时,我们可以在软件“实时地图”选项卡中查看到板子所在具体位置。下面是使用效果! 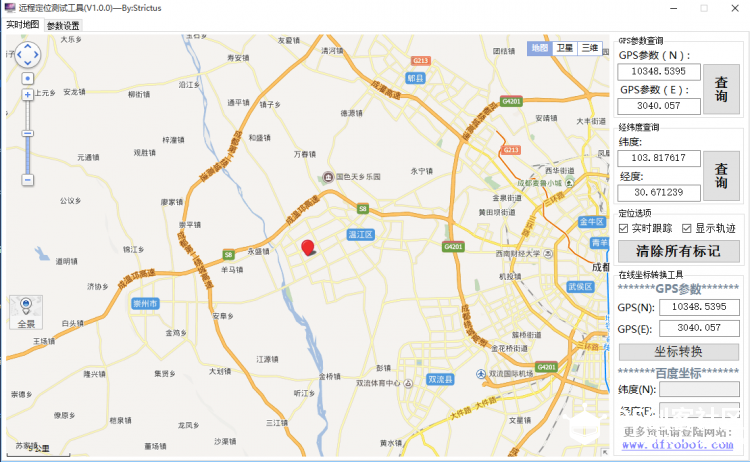 |
zcx 发表于 2016-2-19 15:52 下载链接 https://mc.dfrobot.com.cn/thread-12647-1-1.html#pid41958 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








