|
7548| 3
|
[intel程序猿笔记] 在英特尔® EDISON 开发板上使用 MCU 和超声测距传感器 |
|
以下为部分内容,完整内容和项目代码请至原文链接查看 英特尔® Edison 开发包含一个内部微控制器单元 (MCU)。 在本文中,我将从两个方面解释使用内部 MCU 的优势
MCU 在多款应用中都至关重要。 例如,基于英特尔® Edison 开发板的 Linux* 在与传感器交互时无法提供实时响应。 MCU 支持自 2.1 版开始能够在英特尔® Edison® 开发板固件软件版本上使用。 我们来了解一下英特尔® Edison 计算模块中使用的系统芯片 (SoC):  英特尔® Edison 计算模块中的系统芯片包括两个 CPU:
Minute 英特尔架构内核是一款节能架构,基于英特尔® 486,并额外采用指令,能够与英特尔® 奔腾® 处理器兼容。 MCU 包含丰富的 I/O 子系统(GPIO、I2C、高速 UART、DMA)和 SRAM,并能够访问英特尔® Edison 计算模块上的所有 GPIO 针脚。 适用于代码和数据的总 SRAM 为 192 kb。 MCU 使用 WindRiver 的实时 Viper* 操作系统运行。 MCU 程序支持在 Viper 内核上使用,并可控制连接到 MCU 上的外围设备,而不受英特尔凌动处理器的影响。 例如,它能够控制 GPIO 针脚,与采用 I2C 和 UART 协议的传感器通信,并与英特尔凌动处理器通信。 使用 MCU 得益于两个原因:提供实时微秒级延迟和高能效。 英特尔凌动处理器和 Yocto Project* 标准 Linux* 分发版不支持即购即用的实时应用。 Linux 应用可能会被调度器先占用,从而造成不可接受且不可预测的延迟,因而不可能提供实时响应。 MCU 运行一个应用和实时操作系统,这使得其有可能提供实时响应。 对于许多通信协议需要严格遵守短时间来执行的传感器,均需要实时响应。 如要在没有内部 MCU 的情况下将这些传感器连接到英特尔® Edison 开发板,您将需要使用外部 MCU。 在这种情况下,所有的传感器通信都在外部 MCU 上进行。 例如,面向英特尔® Edison 开发板的 SparkFun Block* – Arduino 扩展板可提供外部 MCU 功能。 但是,使用外部 MCU 将会增加 BOM 成本并提高解决方案的复杂性。 MCU 可以提高某些应用的能效,在这些应用中, CPU 设置为睡眠状态且 MCU 正在等待外部事件(如当传感器的值上升到超过阈值时)。 当外部事件出现时,MCU 将会唤醒 CPU。 《使用 MCU SDK 和 API: 代码示例》一文中介绍了实施示例。 为了解释如何使用内部 MCU,我们将把超声波测距传感器 HC-SR04 连接到英特尔® Edison 开发板中。 我们将把测量到的距离输出到 Grove* LCD RGB 背光符号显示器中。  该传感器有四个针脚:
图片展示了示波器屏幕上的协议: 
MCU 向 Trig 针脚发送一个脉冲。 之后,传感器将相应回波针脚上的脉冲。 脉冲持续时间随测量距离成比例增减。 使用公式来计算距离(位于传感器数据表上): 距离 (cm) = 回波脉冲持续时间 (us) / 58 传感器可以测量从 2 厘米到 400 厘米的距离(如数据表所示)。 不借助微秒级实时延迟,以预估的精确度不可能测量这么短的脉冲的持续时间。 例如,调度器可能预先占用测量流程,测量结果可能无效。 组件:
首先,安装适用于 Arduino 的英特尔® Edison 计算模块和英特尔® Edison 开发板。 接下来,将 Grove Base Shield 扩展板连接至适用于 Arduino 的英特尔® Edison 开发板。 将 Grove LCD RGB 背光灯连接至 Grove Basic Shield 上的任意 I2C 端口。 将超声波测距传感器 HC-SR04 连接至 Grove Basic Shield,如下:
针脚 3 和 4 随机选择。 针对此目的,您可以使用任意 GPIO 针脚。 MCU 支持自 2.1 版开始已经添加到英特尔® Edison 开发板固件软件版本中。 如果您有较旧的固件,则需要更新它。 如要获取当前的固件版本,请使用以下命令: # configure_edison –version 该示例基于固件版本 146。 《刷新英特尔® Edison》一文中提供了固件更新说明。 我更喜欢使用该篇文章中介绍的备用刷新方法。 请在刷新前仔细阅读说明。 使用以太网通过 USB 连接英特尔® Edison 开发板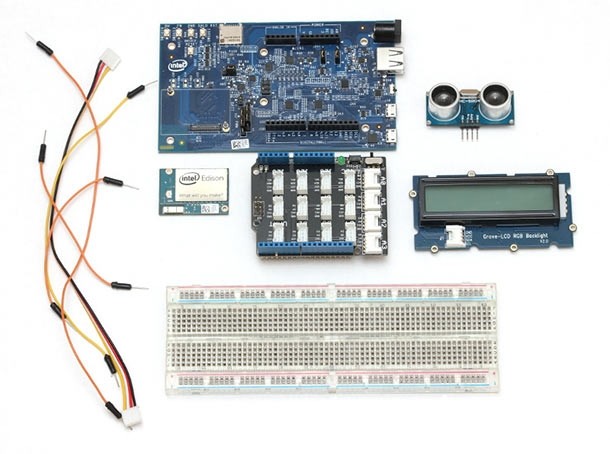 您必须对网络连接进行配置,使其能够与 MCU SDK 中的英特尔® Edison 开发板相连。 如要做到这一点,请将 USB 连接线与顶部的微型 USB 端口相连,并将微型开关设置到底部位置(朝向微型 USB 端口)。 以上为部分内容,完整内容和项目代码请至原文链接查看 相关内容推荐: |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 ARD DAY
ARD DAY






