|
13137| 2
|
[求助] 【六足机器人】关于arduino mega 2560 的问题 |
|
我用 Arduino mega 2560 作为控制器制作了一个六足机器人,通过串口发送命令控制机器人运动。当发送几条命令后,arduino就像是卡住一样,再发送命令也没反应了。 下图是我用Visual Studio IDE debugger 时显示的信息,就卡在 Millis is currently105555. 我怀疑是开发板的问题。跪求大神帮忙看看。至于舵机连接引脚在Configuration.h文件中 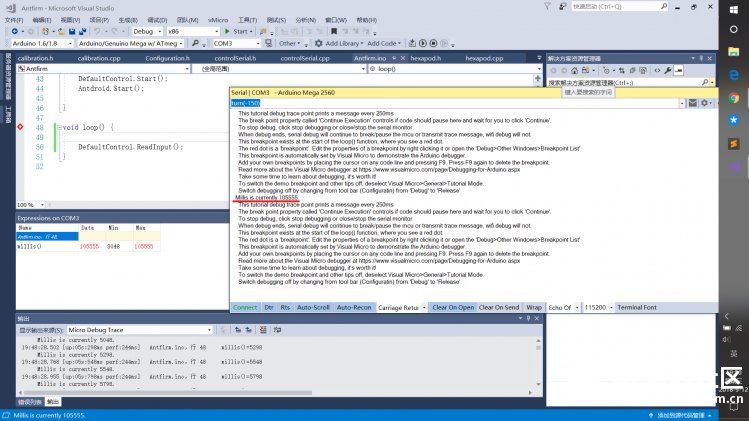 代码下载:  Antfirm.zip Antfirm.zip串口命令: Command list: move(X,Y) Move hexapod with (X,Y) step with selected gait. X: distance forward in milimeters. Y: distance left side in milimeters. Default gait: tripod. Example of use: move(30,-20); turn(Angle) Turn hexapod with selected gait.(positive value: clockwork side) Angle: degrees with one decimal. Default gait: tripod. Example of use: turn(-150); gait [OPTIONS] Select gait. -t, --tripod select tripod gait. -r, --ripple select ripple gait. Default gait: tripod. Example of use: gait -t; balance(pitch, roll, yaw) Balance hexapod mode without move. Pitch: pitch angle in degrees with one decimal. Roll: pitch angle in degrees with one decimal. Yaw: pitch angle in degrees with one decimal. Example of use: balance(50,-60,150); speed [OPTIONS] Change speed of hexapod movements. -r rise speed -d decrease speed -c change step of rise/decrease (speed is [0,255] range) Example of use: speed -c30; height [OPTIONS] Change height of hexapod. -r rise height -d decrease height -c change step of rise/decrease (height is in milimeters) Example of use: height -c30; foot_distance [OPTIONS] Change foot distance of hexapod legs. -r rise foot distance -d decrease foot distance -c change step of rise/decrease (foot distance is in milimeters) Example of use: foot distance -c30; calibrate(Leg,Member,Angle) Calibration of the indicated leg. Leg: number of the leg [0 - 5]. Member: Coxa = 0, Femur = 1, Tibia = 2 [0 - 2]. Angle: angle to default position [0 - 120]. NOTE: to complete calibration send angle 255. Example of use: calibrate(3,0,90); log [OPTIONS] Change information given by the log. -1 error messages -2 error and warn messages -3 error, warn and info messages Example of use: log -2; -4 error, warn, info and debug messages Example of use: log -2; |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






