创建日志
简介
DFRobot的妙想家们找到我,想要用他们开发的神奇的土壤湿度传感器和12C LCD1602做一个项目。
认真思考后,我决定创造一个植物监测仪,而DFRobot则为我提供必要的硬件。我决定制作一个仅由Particle Photon物联网开发板驱动的简易盒子。
该装置每隔30分钟就会检测一次土壤的湿度状况,判断其是否过于干燥。如果检测到湿度较低,装置会触发一个事件,然后由IFTTT通过短信、电话或电子邮件通知你土壤缺水。装置上方还配有一个RGB LED灯,其中绿灯表示植物土壤湿度状况良好,蓝色表示植物土壤湿度过低。
LCD1602可指示植物土壤湿度状况的好坏。
组件
所需硬件组件:
- Particle Photon
- 土壤湿度传感器(兼容Arduino)
- I2C LCD1602液晶模块(兼容Arduino)
- 散射型RGB LED灯
- Micro USB连接器
- Uxcell万能电路板 (4x6 cm)
应用程序与在线服务:
- Particle云集成开发环境
- IFTTT Maker 服务
手工工具与制作设备:
设计
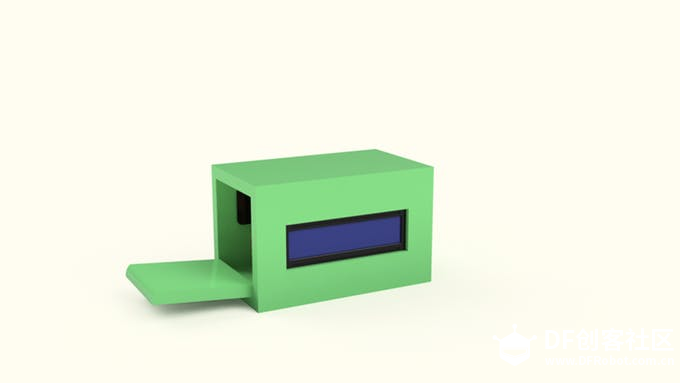
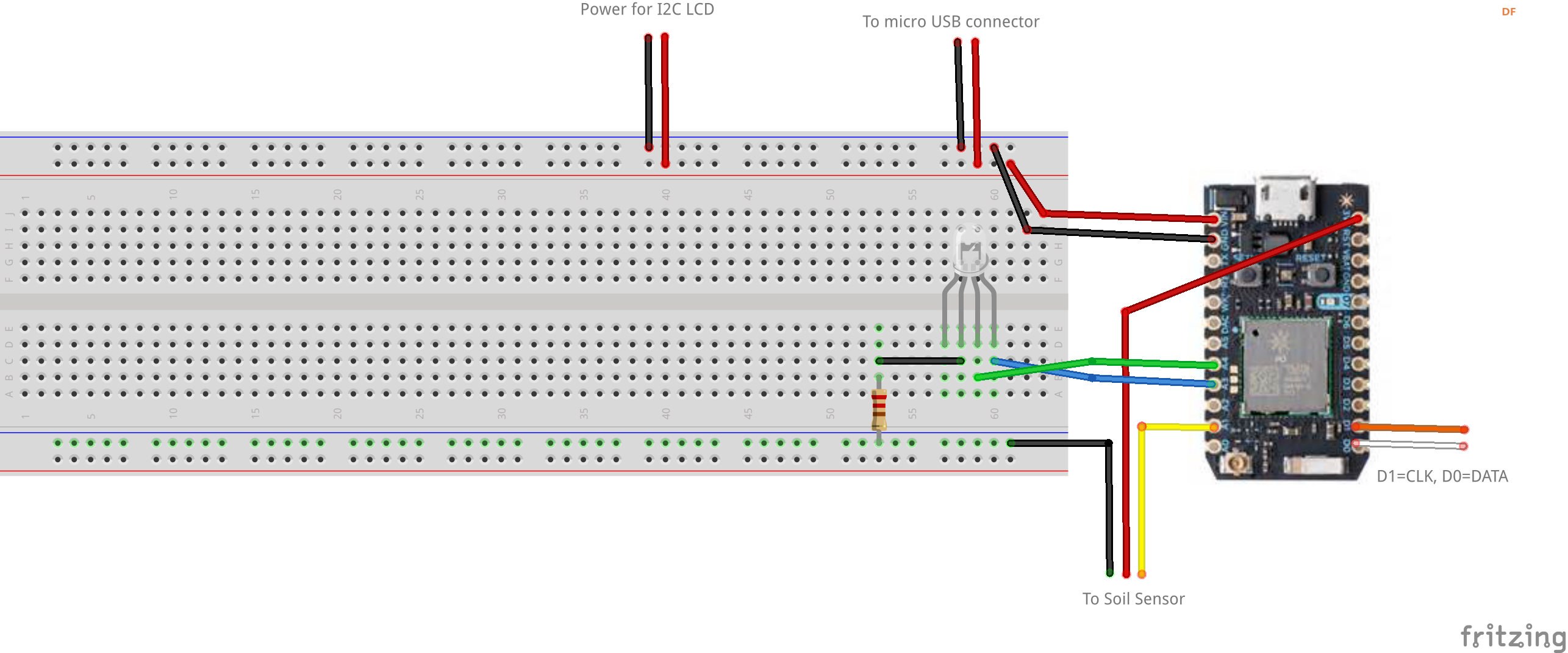
首先,将各个组件以及Micro USB电源连接器连接到Particle Photon上。我加载了一些可在LCD上简略显示湿度的测试代码。代码运行成功后,我开始使用Fusion 360建模。我将此装置的形状设计为矩形棱柱,其正面、顶部以及背面分别配有LCD、LED和Micro USB接口。
我还留了一个小洞,土壤湿度传感器可通过此孔布线。至于图案设计,我想以绿色为底,其上绘制一些黄色花卉图案。
制作
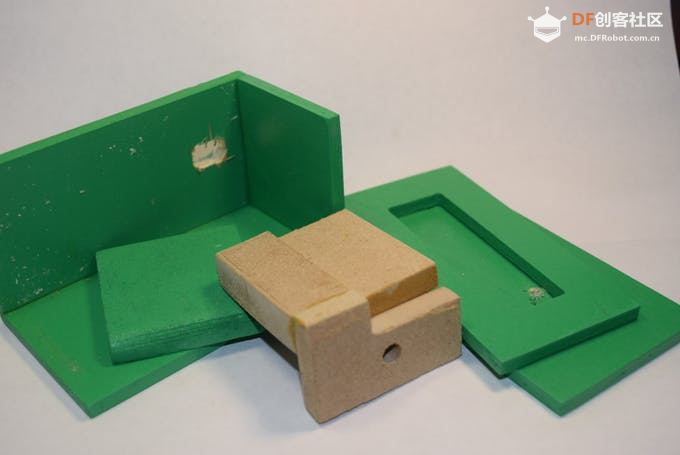
我的Fusion 360设计可用于数控雕刻,所以我把所有部件平稳地放在一个平面上,并从加工路径生成Gcode。接下来,我把准备的一张10.5" x 10.5" x 1/4"胶合板,放置于Millright数控机床上,开始切割各个部件。我还对各个部件进行打磨,使其边缘更为平滑,更具美感。
美化
首先,准备材料:经过数控雕刻的胶合板、一罐绿色喷漆、一罐虫胶、一小瓶黄色丙烯酸漆、若干150-400目砂纸、一瓶木胶和一个砂光机。
我先依次使用低目数和高目数砂纸彻底打磨各个部件。
在所有部件已被充分打磨后,我将底部、侧面和背面粘合在一起。接下来,我为各个部件喷涂了两层虫胶,之后再均匀喷上几层绿漆。
组装
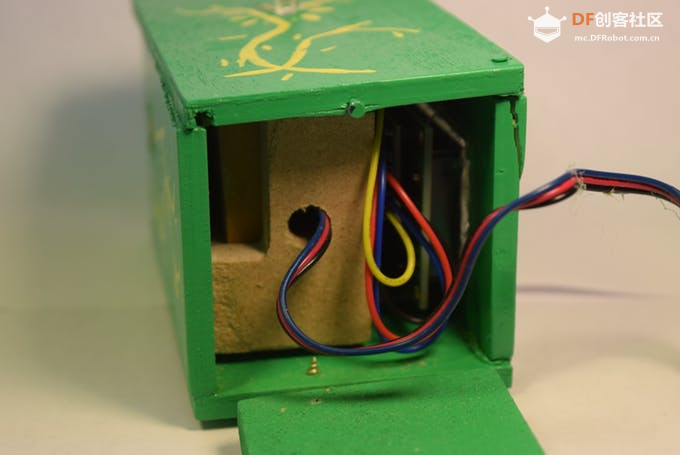
所有部件都喷漆上色后,把电子元件放于外壳内部,并用热胶将其固定。我还通过侧面的小孔将土壤湿度传感器的电线与Photon相连接。
我还专门隔出了一小块区域,以便在装置停用时存放传感器和电线。
编程
我在Particle Photon的云集成开发环境中加载了附图,并将其发送到我的Photon。顶部的RGB LED灯闪烁5次,表示Photon已成功启动并连接。编写代码时,我设置的是当湿度低于15%时,Photon会生成一个名为“浇水”的事件,触发IFTTT小程序。
用法
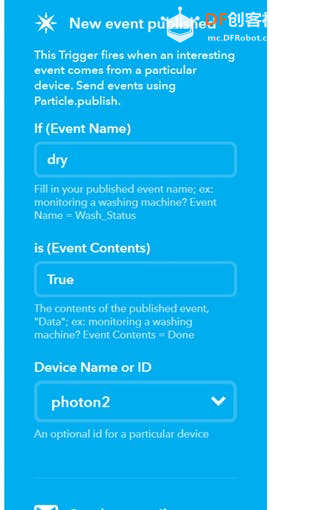
使用此装置时,只需把湿度传感器放入盆栽植物的土壤中,并将Micro USB数据线插入连接器,为装置供电 (5V)。之后,设置好IFTTT小程序,使其在收到Particle Photon服务发送的名为“干燥”的事件时发短信通知我。
它会通过电子邮件发送:“您的植物需要浇水!”。此外,装置上的LCD会显示土壤水分的百分比以及植物的健康状况。现在,你再也不用担心植物是否缺水了。

- //DFRobot.com
- //Compatible with the Arduino IDE 1.0
- //Library version:1.1
-
-
- #include <Wire.h>
- #include <LiquidCrystal_I2C.h>
-
- #define BLUE_PIN A3
- #define GREEN_PIN A4
- #define SOIL_SENSOR A1
-
- //#define RESOLUTION 1024 //Use for 10 bit resolution ADC (Arduino)
- #define RESOLUTION 4096 //Use for 12 bit resolution ADC (Particle Photon)
-
- #define DEBUG_VALS //Comment if you don't want values published to the Particle Cloud
-
- LiquidCrystal_I2C lcd(0x20,16,2); // set the LCD address to 0x20(Cooperate with 3 short circuit caps) for a 16 chars and 2 line display
- int level;
-
- /*byte one_bar[8] = {
- B00000,
- B00000,
- B00000,
- B00000,
- B00000,
- B00000,
- B00000,
- B11111
- };
-
- byte two_bar[8] = {
- B00000,
- B00000,
- B00000,
- B00000,
- B00000,
- B00000,
- B11111,
- B11111
- };
-
- byte three_bar[8] = {
- B00000,
- B00000,
- B00000,
- B00000,
- B00000,
- B11111,
- B11111,
- B11111
- };
-
- byte four_bar[8] = {
- B00000,
- B00000,
- B00000,
- B00000,
- B11111,
- B11111,
- B11111,
- B11111
- };
-
- byte five_bar[8] = {
- B00000,
- B00000,
- B00000,
- B11111,
- B11111,
- B11111,
- B11111,
- B11111
- };
-
- byte six_bar[8] = {
- B00000,
- B00000,
- B11111,
- B11111,
- B11111,
- B11111,
- B11111,
- B11111,
- };
-
- byte seven_bar[8] = {
- B00000,
- B11111,
- B11111,
- B11111,
- B11111,
- B11111,
- B11111,
- B11111
- };
-
- byte eight_bar[8] = {
- B11111,
- B11111,
- B11111,
- B11111,
- B11111,
- B11111,
- B11111,
- B11111
- }; */
-
- bool is_spam = false;
-
- void debug_values(int raw_value){
- Particle.publish("soil_values_raw", String(raw_value));
- }
-
- void setup(){
-
- /*lcd.createChar(0, one_bar);
- lcd.createChar(1, two_bar);
- lcd.createChar(2, three_bar);
- lcd.createChar(3, four_bar);
- lcd.createChar(4, five_bar);
- lcd.createChar(5, six_bar);
- lcd.createChar(6, seven_bar);
- lcd.createChar(7, eight_bar);*/
-
- pinMode(BLUE_PIN, OUTPUT);
- pinMode(GREEN_PIN, OUTPUT);
- pinMode(SOIL_SENSOR, INPUT);
- lcd.init(); // initialize the lcd
- lcd.backlight();
-
- lcd_clear();
-
- lcd.setCursor(0, 0);
- lcd.print("Plant hydration");
- lcd.setCursor(0, 1);
- lcd.print("monitor");
- delay(4000);
- }
-
- void loop(){
-
- int reading2 = take_reading();
-
- float reading = reading2;
-
- lcd.print("Water level:");
- lcd.setCursor(0,1);
- lcd.print(reading);
- delay(1000);
-
- #ifdef DEBUG_VALS
- debug_values(reading);
- #endif
-
- Particle.publish("level", String(reading));
-
- if(reading >= .95*RESOLUTION){
- lcd_clear();
- lcd.print("Did you water");
- lcd.setCursor(0,1);
- lcd.print("too much?");
- level = 16;
- }
- else if(reading >= .85*RESOLUTION){
- lcd_clear();
- lcd.print("That's plenty");
- level = 14;
- }
- else if(reading >= .78*RESOLUTION){
- lcd_clear();
- lcd.print("Thanks for all");
- lcd.setCursor(0,1);
- lcd.print("of that water");
- level = 13;
- }
- else if(reading >= .70*RESOLUTION){
- lcd_clear();
- lcd.print("Woah, that's");
- lcd.setCursor(0,1);
- lcd.print("a good drink");
- level = 12;
- }
- else if(reading >= .65*RESOLUTION){
- lcd_clear();
- lcd.print("That makes me");
- lcd.setCursor(0,1);
- lcd.print("very happy");
- level = 11;
- }
- else if(reading >= .60*RESOLUTION){
- lcd_clear();
- lcd.print("I love you");
- lcd.setCursor(0,1);
- lcd.print("more now");
- level = 10;
- }
- else if(reading >= .55*RESOLUTION){
- lcd_clear();
- lcd.print("Meh, almost");
- lcd.setCursor(0,1);
- lcd.print("time for more");
- level = 9;
- }
- else if(reading >= .50*RESOLUTION){
- lcd_clear();
- lcd.print("Did you water");
- lcd.setCursor(0,1);
- lcd.print("too much?");
- level = 8;
- }
- else if(reading >= .45*RESOLUTION){
- lcd_clear();
- lcd.print("Still pretty");
- lcd.setCursor(0,1);
- lcd.print("content");
- level = 7;
- }
- else if(reading >= .40*RESOLUTION){
- lcd_clear();
- lcd.print("Get ready for");
- lcd.setCursor(0,1);
- lcd.print("some watering!");
- level = 6;
- }
- else if(reading >= .35*RESOLUTION){
- lcd_clear();
- lcd.print("I'm still");
- lcd.setCursor(0,1);
- lcd.print("waiting");
- level = 5;
- }
- else if(reading >= .30*RESOLUTION){
- lcd_clear();
- lcd.print("OK, water me");
- lcd.setCursor(0,1);
- lcd.print("I'm very thirsty");
- level = 4;
- }
- else if(reading >= .22*RESOLUTION){
- lcd_clear();
- lcd.print("Still no water?");
- lcd.setCursor(0,1);
- lcd.print("You're mean");
- level = 3;
- }
- else if(reading >= .15*RESOLUTION){
- lcd_clear();
- lcd.print("Water please");
- lcd.setCursor(0,1);
- lcd.print("it's dry here!");
- level = 2;
- }
- else if(reading >= .08*RESOLUTION){
- lcd_clear();
- lcd.print("I'm about");
- lcd.setCursor(0,1);
- lcd.print("to die");
- level = 1;
- }
- else if(reading >= .04*RESOLUTION){
- lcd_clear();
- lcd.print("Blahhh :(");
- lcd.setCursor(0,1);
- lcd.print("you killed me");
- level = 0;
- }
- delay(3000);
- eval_level();
- delay(4000);
- lcd_clear();
- no_green();
-
- }
-
- void eval_level(){
- if(level>8){
- solid_green();
- }
- else if(level<8 && level != 0){
- blink_blue(8, 250);
- if(is_spam==false){
- Particle.publish("dry", "True");
- }
- is_spam = true;
- }
- else if(level==8){
- blink_blue(3, 250);
- }
- else if(level==0){
- blink_blue(10, 250);
- }
- }
-
- int take_reading(){
- lcd_clear();
- lcd.print("Taking reading");
- int amount = analogRead(SOIL_SENSOR);
- delay(1000);
- lcd_clear();
- return amount;
- }
-
- void blink_blue(int number_of_loops, int duration){
- for(int i=0; i< number_of_loops; i++){
- digitalWrite(BLUE_PIN, 1);
- delay(duration);
- digitalWrite(BLUE_PIN, 0);
- delay(duration);
- }
- }
-
- void solid_green(){
- digitalWrite(GREEN_PIN, 1);
- }
-
- void no_green(){
- digitalWrite(GREEN_PIN, 0);
- }
-
- void lcd_clear(){
- lcd.clear();
- lcd.setCursor(0,0);
- }






 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 ARD DAY
ARD DAY






