|
18072| 3
|
[项目] 来自日本的脑洞——M5StickC平衡机器人 |
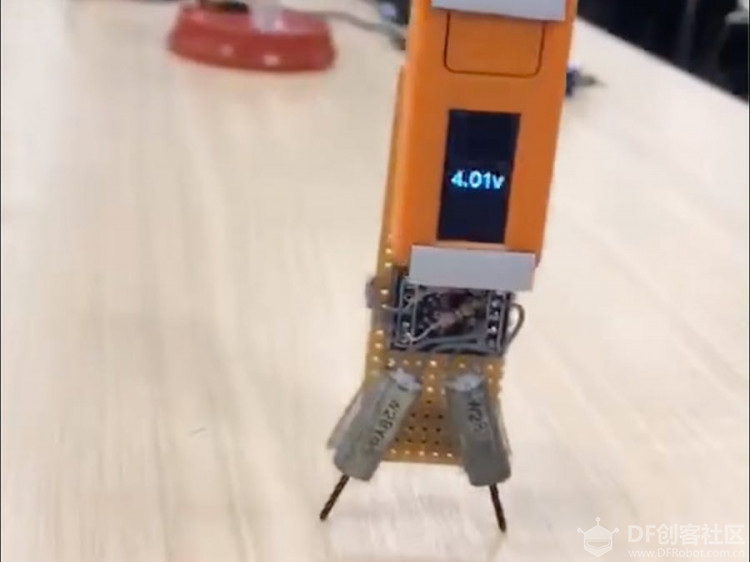 M5StickC内置了SH200Q/MPU6886,也就是加速度计和陀螺仪 ,添加驱动板和小电机就可以完成平衡机器人,今天就分享一个日本maker做的一个有趣的项目,直接利用电机轴来进行平衡。 电路原理图比较简单,使用DRV8830的I2C接口与M5StickC的G0和G26连接,这里接入了电阻进行上拉,防止电路干扰。 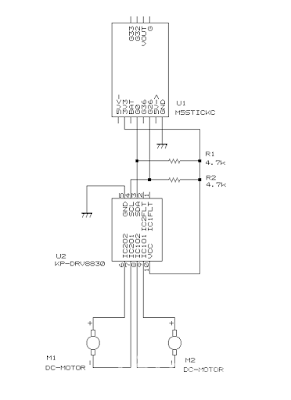 根据电路使用洞洞板连接,同时电机也要固定到洞洞板两个角上,电机倾斜45度。 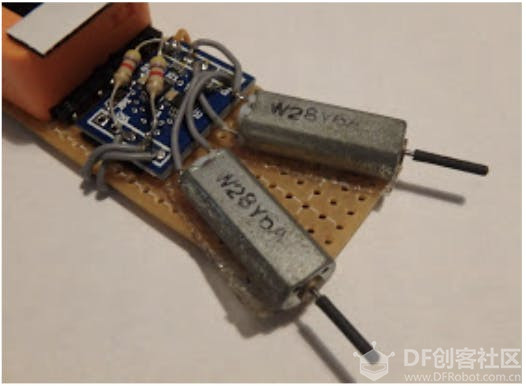 电机使用的型号是RM0TV0009AWZZ ,电机轴套上0.8毫米的热缩管。  为了让机器人的平衡性更好可以适当贴上双面胶调整配重 代码部分,由于M5StickC有MPU6886和SH200Q两个版本的传感器芯片,因此有两个版本的代码 [mw_shl_code=c,true]//SH200Q // M5StickC Balancing Robot // by Kiraku Labo, 2019 // // 1. Lay the robot flat, and power on // 2. Wait until G.Gal (Gyro calibration) completes and Accel shows at the bottom // 3. Hold the robot upright and wait until A.Cal (Accel calibration) completes. // // short push M5 button: Gyro calibration // long push M5 button: switch between standig mode and demo (circle) mode // #include <M5StickC.h> //#define SHORT //height of the robot: short ~= 90mm, tall ~= 100mm #define INVERTED //M5StickC upside down #define POLARITY //Motor direction reversed #define BTN_A 37 #define BTN_B 39 #define MOTOR_R 0x65 //A0=low, A1=open #define MOTOR_L 0x63 //A0=high, A1=open boolean serialMonitor=false; int counter=0; uint32_t time0=0, time1=0; int16_t counterOverSpd=0, maxOvs=20; float aveAccX=0.0, aveAccZ=0.0; float power, powerR, powerL, yawPower; float varAng, varOmg, varSpd, varDst, varIang; float gyroYoffset, gyroZoffset, accXoffset, accZoffset; float gyroYdata, gyroZdata, accXdata, accZdata; int16_t accX, accY, accZ, tmp, gyroX, gyroY, gyroZ; float cutoff=0.1; //~=2 * pi * f (Hz) assuming clk is negligible compared to 1/w const float clk = 0.01; // in sec, const uint32_t interval = (uint32_t) (clk*1000); // in msec boolean calibrated=false; int8_t state=-1; float Kang, Komg, KIang, Kyaw, Kdst, Kspd; int16_t maxSpd; float orientation=0.0; float moveDestination, moveTarget; float moveRate=0.0; float moveStep = 0.2 * clk; int16_t motorDeadband=0; int16_t motorDeadbandNeg=0; //compiler does not accept formula for min(x,y) float mechFactorR, mechFactorL, mechLRbal, mechFact; int8_t motorRDir=0, motorLDir=0; bool spinContinuous=false; float spinDestination, spinTarget, spinRate; float spinStep = 30.0*clk; int16_t ipowerL=0, ipowerR = 0; int16_t motorLdir=0, motorRdir=0; //stop 1:+ -1:- float gyroZdps, accXg; float vBatt, voltAve=3.7; int16_t drvOffset, punchSpd, punchSpd2, punchSpd2N, punchDur, punchCountL=0, punchCountR=0; byte demoMode=0; void setup() { pinMode(BTN_A, INPUT); pinMode(BTN_B, INPUT); M5.begin(); M5.IMU.Init(); Wire.begin(0, 26); //SDA,SCL Wire.setClock(50000); Serial.begin(115200); M5.Axp.ScreenBreath(11); #ifdef INVERTED M5.Lcd.setRotation(2); #else M5.Lcd.setRotation(0); #endif M5.Lcd.setTextFont(4); M5.Lcd.fillScreen(BLACK); M5.Lcd.setTextSize(1); M5.Lcd.setCursor(0, 0); M5.Lcd.setCursor(0,70); M5.Lcd.println(" G.Cal"); resetMotor(); resetPara(); resetVar(); delay(1000); getBaselineAccZ(); getBaselineGyro(); M5.Lcd.fillScreen(BLACK); M5.Lcd.setCursor(10,70); vBatt= M5.Axp.GetVbatData() * 1.1 / 1000; M5.Lcd.printf("%4.2fv ", vBatt); } void loop() { checkButton(); getGyro(); switch (state) { case -1: M5.Lcd.setCursor(10,70); vBatt= M5.Axp.GetVbatData() * 1.1 / 1000; M5.Lcd.printf("%4.2fv ", vBatt); M5.Lcd.setCursor(10,130); M5.Lcd.printf("%4d ", -(int16_t)(aveAccZ-accZoffset)); if (upright()) state=0; break; case 0: //baseline calibrate(); state=1; break; case 1: //run if (!calibrated) state=-1; else if (standing() && counterOverSpd <= maxOvs) { calcTarget(); drive(); } else { drvMotorR(0); drvMotorL(0); counterOverSpd=0; resetVar(); state=9; } break; case 9: //fell if (laid()) { M5.Lcd.fillScreen(BLACK); state=-1; } break; } counter += 1; if (counter >= 100) { counter = 0; vBatt= M5.Axp.GetVbatData() * 1.1 / 1000; M5.Lcd.setCursor(10,70); M5.Lcd.printf("%4.2fv ", vBatt); sendStatus(); } #ifdef DEVELOP devLoop(); #endif do time1 = millis(); while (time1 - time0 < interval); time0 = time1; } void calibrate() { resetVar(); drvMotorL(0); drvMotorR(0); counterOverSpd=0; delay(1000); M5.Lcd.fillScreen(BLACK); M5.Lcd.setCursor(0,70); M5.Lcd.println(" A.Cal "); delay(1000); getBaselineAccX(); calibrated=true; M5.Lcd.setCursor(0,70); M5.Lcd.println(" "); } void getBaselineAccX() { accXoffset=0.0; for (int i=1; i <= 30; i++){ readGyro(); accXoffset += accXdata; delay(20); } accXoffset /= 30; } void getBaselineAccZ() { accZoffset=0.0; for (int i=1; i <= 30; i++){ readGyro(); accZoffset += accZdata; delay(20); } accZoffset /= 30; } void getBaselineGyro() { gyroZoffset=gyroYoffset=0.0; for (int i=1; i <= 30; i++){ readGyro(); gyroZoffset += gyroZdata; gyroYoffset += gyroYdata; delay(20); } gyroYoffset /= 30; gyroZoffset /= 30; } void checkButton() { checkButtonA(); #ifdef DEVELOP checkButtonB(); #endif } void checkButtonA() { uint32_t msec=millis(); if (digitalRead(BTN_A) == LOW) { M5.Lcd.setCursor(5, 5); M5.Lcd.print(" "); while (digitalRead(BTN_A) == LOW) { if (millis()-msec>=2000) break; } if (digitalRead(BTN_A) == HIGH) btnAshort(); else btnAlong(); } } void btnAlong() { M5.Lcd.setCursor(5, 5); if (demoMode==1) { demoMode=0; moveRate=0.0; spinContinuous=false; spinStep=30*clk; M5.Lcd.print("Stand "); } else { demoMode=1; moveRate=-1.0; spinContinuous=true; spinStep=40*clk; M5.Lcd.print("Demo "); } while (digitalRead(BTN_A) == LOW); } void btnAshort() { M5.Lcd.setCursor(0, 70); M5.Lcd.print(" G.Cal "); delay(1000); M5.IMU.Init(); getBaselineAccZ(); getBaselineGyro(); M5.Lcd.setCursor(0, 70); M5.Lcd.print(" "); } void resetPara() { #ifdef SHORT Kang=35.0; Komg=0.8; KIang=500.0; Kyaw=5.0; Kdst=8.0; Kspd=2.5; mechFact=0.25; mechLRbal=1.0; punchSpd=25; punchDur=2; motorDeadband=20; motorDeadbandNeg=-motorDeadband; maxSpd=250; //limit slip drvOffset=0; #else Kang=35.0; Komg=0.8; KIang=500.0; Kyaw=5.0; Kdst=8.0; Kspd=2.5; mechFact=0.37; mechLRbal=1.0; punchSpd=0; punchDur=0; motorDeadband=25; motorDeadbandNeg=-motorDeadband; maxSpd=250; //limit slip drvOffset=0; #endif float balL=2.0*mechLRbal/(1.0+mechLRbal); mechFactorL=mechFact*balL; mechFactorR=mechFactorL/mechLRbal; punchSpd2=max(punchSpd, motorDeadband); punchSpd2N=-punchSpd2; } void getGyro() { readGyro(); gyroZdps = (gyroZdata - gyroZoffset) * M5.IMU.gRes; varOmg = (gyroYdata - gyroYoffset) * M5.IMU.gRes; // unit:deg/sec accXg = (accXdata - accXoffset) * M5.IMU.aRes; //unit:g orientation += gyroZdps * clk; varAng += (varOmg + (accXg * 57.3 - varAng) * cutoff ) * clk; //assuming clk*clk is negligible } void readGyro() { M5.IMU.getGyroData(&gyroX,&gyroY,&gyroZ); M5.IMU.getAccelData(&accX,&accY,&accZ); #ifdef INVERTED gyroYdata=(float)gyroX; gyroZdata=-(float)gyroY; accXdata=(float)accZ; accZdata=(float)accY; #else gyroYdata=-(float)gyroX; gyroZdata=(float)gyroY; accXdata=(float)accZ; accZdata=-(float)accY; #endif aveAccX = aveAccX * 0.9 + accXdata * 0.1; aveAccZ = aveAccZ * 0.9 + accZdata * 0.1; } bool laid() { if (abs(aveAccX) > 3000.0) return true; else return false; } bool upright() { if (abs(aveAccZ-accZoffset) > 3000.0) return true; else return false; } bool standing() { if (abs(aveAccZ-accZoffset) > 3000.0 && abs(varAng) < 40.0) return true; else return false; } void calcTarget() { if (spinContinuous) spinTarget += spinStep; else { if (spinTarget < spinDestination) spinTarget += spinStep; if (spinTarget > spinDestination) spinTarget -= spinStep; } moveTarget += moveStep * moveRate; } void drive() { varSpd += power * clk; varDst += Kdst * (varSpd * clk - moveTarget); varIang += KIang * varAng * clk; power = varIang + varDst + (Kspd * varSpd) + (Kang * varAng) + (Komg * varOmg); if (abs(power) > 1000.0) counterOverSpd += 1; else counterOverSpd =0; if (counterOverSpd > maxOvs) return; power = constrain(power, -maxSpd, maxSpd); yawPower = (orientation - spinTarget) * Kyaw; powerR = power + yawPower; powerL = power - yawPower; ipowerL = (int16_t) constrain(powerL * mechFactorL, -maxSpd, maxSpd); if (ipowerL > 0) { if (motorLdir == 1) punchCountL = constrain(++punchCountL, 0, 100); else punchCountL=0; motorLdir = 1; if (punchCountL<punchDur) drvMotorL(max(ipowerL, punchSpd2)+drvOffset); else drvMotorL(max(ipowerL, motorDeadband)+drvOffset); } else if (ipowerL < 0) { if (motorLdir == -1) punchCountL = constrain(++punchCountL, 0, 100); else punchCountL=0; motorLdir = -1; if (punchCountL<punchDur) drvMotorL(min(ipowerL, punchSpd2N) +drvOffset); else drvMotorL(min(ipowerL, motorDeadbandNeg)+drvOffset); } else { drvMotorL(0); motorLdir = 0; } ipowerR = (int16_t) constrain(powerR * mechFactorR, -maxSpd, maxSpd); if (ipowerR > 0) { if (motorRdir == 1) punchCountR = constrain(++punchCountL, 0, 100); else punchCountR=0; motorRdir = 1; if (punchCountR<punchDur) drvMotorR(max(ipowerR, punchSpd2) +drvOffset); else drvMotorR(max(ipowerR, motorDeadband)+drvOffset); } else if (ipowerR < 0) { if (motorRdir == -1) punchCountR = constrain(++punchCountR, 0, 100); else punchCountR=0; motorRdir = -1; if (punchCountR<punchDur) drvMotorR(min(ipowerR, punchSpd2N)+drvOffset); else drvMotorR(min(ipowerR, motorDeadbandNeg)+drvOffset); } else { drvMotorR(0); motorRdir = 0; } } void drvMotorL(int16_t pwr) { #ifdef POLARITY drvMotor(MOTOR_L, pwr); #else drvMotor(MOTOR_L, -pwr); #endif } void drvMotorR(int16_t pwr) { #ifdef POLARITY drvMotor(MOTOR_R, pwr); #else drvMotor(MOTOR_R, -pwr); #endif } void drvMotor(byte adr, int16_t pwr) { //pwr -255 to 255 byte dir, st; if (pwr < 0) dir = 2; else dir =1; byte ipower=(byte) (abs(pwr)/4); if (ipower == 0) dir=3; //brake ipower = constrain (ipower, 0, 63); st = drv8830read(adr); if (st & 1) drv8830write(adr, 0, 0); drv8830write(adr, ipower, dir); } void drv8830write(byte adr, byte pwm, byte ctrl) { Wire.beginTransmission(adr); Wire.write(0); Wire.write(pwm*4+ctrl); Wire.endTransmission(true); } int drv8830read(byte adr) { Wire.beginTransmission(adr); Wire.write(1); Wire.endTransmission(false); Wire.requestFrom((int)adr, (int)1, (int)1); return Wire.read(); } void resetMotor() { drvMotor(MOTOR_R, 0); drvMotor(MOTOR_L, 0); } void resetVar() { power=0.0; moveTarget=0.0; spinDestination=0.0; spinTarget=0.0; spinRate=0.0; orientation=0.0; varAng=0.0; varOmg=0.0; varDst=0.0; varSpd=0.0; varIang=0.0; } void sendStatus () { Serial.print(millis()-time0); Serial.print(" state="); Serial.print(state); Serial.print(" accX="); Serial.print(accXdata); Serial.print(" ang=");Serial.print(varAng); Serial.print(" Pdur="); Serial.print(punchDur); Serial.print(" gyroY="); Serial.print(gyroYdata); Serial.print(" MFL="); Serial.print(mechFactorL); Serial.print(" MFR="); Serial.print(mechFactorR); Serial.print(", "); Serial.print(millis()-time0); Serial.println(); }[/mw_shl_code] [mw_shl_code=c,true]//MPU6886 // M5StickC Balancing Robot // by Kiraku Labo, 2019 // // Supports MPU6886 // Requires M5StickC library 0.1.0 (or above hopefully) // // 1. Lay the robot flat, and power on // 2. Wait until G.Gal (Gyro calibration) completes and Accel shows at the bottom // 3. Hold the robot upright and wait until A.Cal (Accel calibration) completes. // // short push M5 button: Gyro calibration // long push M5 button: switch between standig mode and demo (circle) mode // #include <M5StickC.h> //Comment out the follwoing two lines for SH200Q #include "utility/MPU6886.h" #define IMU MPU6886 //#define SHORT //height of the robot: short ~= 90mm, tall ~= 100mm #define INVERTED //M5StickC upside down #define POLARITY //Motor direction reversed #define BTN_A 37 #define BTN_B 39 #define MOTOR_R 0x65 //A0=low, A1=open #define MOTOR_L 0x63 //A0=high, A1=open boolean serialMonitor=false; int counter=0; uint32_t time0=0, time1=0; int16_t counterOverSpd=0, maxOvs=20; float aveAccX=0.0, aveAccZ=0.0; float power, powerR, powerL, yawPower; float varAng, varOmg, varSpd, varDst, varIang; float gyroYoffset, gyroZoffset, accXoffset, accZoffset; float gyroYdata, gyroZdata, accXdata, accZdata; int16_t accX, accY, accZ, tmp, gyroX, gyroY, gyroZ; float cutoff=0.1; //~=2 * pi * f (Hz) assuming clk is negligible compared to 1/w const float clk = 0.01; // in sec, const uint32_t interval = (uint32_t) (clk*1000); // in msec boolean calibrated=false; int8_t state=-1; float Kang, Komg, KIang, Kyaw, Kdst, Kspd; int16_t maxSpd; float orientation=0.0; float moveDestination, moveTarget; float moveRate=0.0; float moveStep = 0.2 * clk; int16_t motorDeadband=0; int16_t motorDeadbandNeg=0; //compiler does not accept formula for min(x,y) float mechFactorR, mechFactorL, mechLRbal, mechFact; int8_t motorRDir=0, motorLDir=0; bool spinContinuous=false; float spinDestination, spinTarget, spinRate; float spinStep = 30.0*clk; int16_t ipowerL=0, ipowerR = 0; int16_t motorLdir=0, motorRdir=0; //stop 1:+ -1:- float gyroZdps, accXg; float vBatt, voltAve=3.7; int16_t drvOffset, punchSpd, punchSpd2, punchSpd2N, punchDur, punchCountL=0, punchCountR=0; byte demoMode=0; boolean mpu6886; void setup() { pinMode(BTN_A, INPUT); pinMode(BTN_B, INPUT); M5.begin(); M5.IMU.Init(); Wire.begin(0, 26); //SDA,SCL Wire.setClock(50000); Serial.begin(115200); M5.Axp.ScreenBreath(11); #ifdef INVERTED M5.Lcd.setRotation(2); #else M5.Lcd.setRotation(0); #endif M5.Lcd.setTextFont(4); M5.Lcd.fillScreen(BLACK); M5.Lcd.setTextSize(1); M5.Lcd.setCursor(0, 0); M5.Lcd.setCursor(0,70); M5.Lcd.println(" G.Cal"); resetMotor(); resetPara(); resetVar(); delay(1000); getBaselineAccZ(); getBaselineGyro(); M5.Lcd.fillScreen(BLACK); M5.Lcd.setCursor(10,70); vBatt= M5.Axp.GetVbatData() * 1.1 / 1000; M5.Lcd.printf("%4.2fv ", vBatt); } void loop() { checkButton(); getGyro(); switch (state) { case -1: M5.Lcd.setCursor(10,70); vBatt= M5.Axp.GetVbatData() * 1.1 / 1000; M5.Lcd.printf("%4.2fv ", vBatt); M5.Lcd.setCursor(10,130); M5.Lcd.printf("%4d ", -(int16_t)(aveAccZ-accZoffset)); if (upright()) state=0; break; case 0: //baseline calibrate(); state=1; break; case 1: //run if (!calibrated) state=-1; else if (standing() && counterOverSpd <= maxOvs) { calcTarget(); drive(); } else { drvMotorR(0); drvMotorL(0); counterOverSpd=0; resetVar(); state=9; } break; case 9: //fell if (laid()) { M5.Lcd.fillScreen(BLACK); state=-1; } break; } counter += 1; if (counter >= 100) { counter = 0; vBatt= M5.Axp.GetVbatData() * 1.1 / 1000; M5.Lcd.setCursor(10,70); M5.Lcd.printf("%4.2fv ", vBatt); sendStatus(); } #ifdef DEVELOP devLoop(); #endif do time1 = millis(); while (time1 - time0 < interval); time0 = time1; } void calibrate() { resetVar(); drvMotorL(0); drvMotorR(0); counterOverSpd=0; delay(1000); M5.Lcd.fillScreen(BLACK); M5.Lcd.setCursor(0,70); M5.Lcd.println(" A.Cal "); delay(1000); getBaselineAccX(); calibrated=true; M5.Lcd.setCursor(0,70); M5.Lcd.println(" "); } void getBaselineAccX() { accXoffset=0.0; for (int i=1; i <= 30; i++){ readGyro(); accXoffset += accXdata; delay(20); } accXoffset /= 30; } void getBaselineAccZ() { accZoffset=0.0; for (int i=1; i <= 30; i++){ readGyro(); accZoffset += accZdata; delay(20); } accZoffset /= 30; } void getBaselineGyro() { gyroZoffset=gyroYoffset=0.0; for (int i=1; i <= 30; i++){ readGyro(); gyroZoffset += gyroZdata; gyroYoffset += gyroYdata; delay(20); } gyroYoffset /= 30; gyroZoffset /= 30; } void checkButton() { checkButtonA(); #ifdef DEVELOP checkButtonB(); #endif } void checkButtonA() { uint32_t msec=millis(); if (digitalRead(BTN_A) == LOW) { M5.Lcd.setCursor(5, 5); M5.Lcd.print(" "); while (digitalRead(BTN_A) == LOW) { if (millis()-msec>=2000) break; } if (digitalRead(BTN_A) == HIGH) btnAshort(); else btnAlong(); } } void btnAlong() { M5.Lcd.setCursor(5, 5); if (demoMode==1) { demoMode=0; moveRate=0.0; spinContinuous=false; spinStep=30*clk; M5.Lcd.print("Stand "); } else { demoMode=1; moveRate=-1.0; spinContinuous=true; spinStep=40*clk; M5.Lcd.print("Demo "); } while (digitalRead(BTN_A) == LOW); } void btnAshort() { M5.Lcd.setCursor(0, 70); M5.Lcd.print(" G.Cal "); delay(1000); M5.IMU.Init(); getBaselineAccZ(); getBaselineGyro(); M5.Lcd.setCursor(0, 70); M5.Lcd.print(" "); } void resetPara() { #ifdef SHORT Kang=35.0; Komg=0.8; KIang=500.0; Kyaw=5.0; Kdst=8.0; Kspd=2.5; mechFact=0.25; mechLRbal=1.0; punchSpd=25; punchDur=2; motorDeadband=20; motorDeadbandNeg=-motorDeadband; maxSpd=250; //limit slip drvOffset=0; #else Kang=35.0; Komg=0.8; KIang=500.0; Kyaw=5.0; Kdst=8.0; Kspd=2.5; mechFact=0.37; mechLRbal=1.0; punchSpd=0; punchDur=0; motorDeadband=25; motorDeadbandNeg=-motorDeadband; maxSpd=250; //limit slip drvOffset=0; #endif float balL=2.0*mechLRbal/(1.0+mechLRbal); mechFactorL=mechFact*balL; mechFactorR=mechFactorL/mechLRbal; punchSpd2=max(punchSpd, motorDeadband); punchSpd2N=-punchSpd2; } void getGyro() { readGyro(); gyroZdps = (gyroZdata - gyroZoffset) * M5.IMU.gRes; varOmg = (gyroYdata - gyroYoffset) * M5.IMU.gRes; // unit:deg/sec accXg = (accXdata - accXoffset) * M5.IMU.aRes; //unit:g orientation += gyroZdps * clk; varAng += (varOmg + (accXg * 57.3 - varAng) * cutoff ) * clk; //assuming clk*clk is negligible } void readGyro() { // M5.IMU.getGyroData(&gyroX,&gyroY,&gyroZ); // M5.IMU.getAccelData(&accX,&accY,&accZ); M5.IMU.getGyroAdc(&gyroX,&gyroY,&gyroZ); M5.IMU.getAccelAdc(&accX,&accY,&accZ); #ifdef INVERTED gyroYdata=(float)gyroX; gyroZdata=-(float)gyroY; accXdata=(float)accZ; accZdata=(float)accY; #else gyroYdata=-(float)gyroX; gyroZdata=(float)gyroY; accXdata=(float)accZ; accZdata=-(float)accY; #endif aveAccX = aveAccX * 0.9 + accXdata * 0.1; aveAccZ = aveAccZ * 0.9 + accZdata * 0.1; } bool laid() { if (abs(aveAccX) > 3000.0) return true; else return false; } bool upright() { if (abs(aveAccZ-accZoffset) > 3000.0) return true; else return false; } bool standing() { if (abs(aveAccZ-accZoffset) > 3000.0 && abs(varAng) < 40.0) return true; else return false; } void calcTarget() { if (spinContinuous) spinTarget += spinStep; else { if (spinTarget < spinDestination) spinTarget += spinStep; if (spinTarget > spinDestination) spinTarget -= spinStep; } moveTarget += moveStep * moveRate; } void drive() { varSpd += power * clk; varDst += Kdst * (varSpd * clk - moveTarget); varIang += KIang * varAng * clk; power = varIang + varDst + (Kspd * varSpd) + (Kang * varAng) + (Komg * varOmg); if (abs(power) > 1000.0) counterOverSpd += 1; else counterOverSpd =0; if (counterOverSpd > maxOvs) return; power = constrain(power, -maxSpd, maxSpd); yawPower = (orientation - spinTarget) * Kyaw; powerR = power + yawPower; powerL = power - yawPower; ipowerL = (int16_t) constrain(powerL * mechFactorL, -maxSpd, maxSpd); if (ipowerL > 0) { if (motorLdir == 1) punchCountL = constrain(++punchCountL, 0, 100); else punchCountL=0; motorLdir = 1; if (punchCountL<punchDur) drvMotorL(max(ipowerL, punchSpd2)+drvOffset); else drvMotorL(max(ipowerL, motorDeadband)+drvOffset); } else if (ipowerL < 0) { if (motorLdir == -1) punchCountL = constrain(++punchCountL, 0, 100); else punchCountL=0; motorLdir = -1; if (punchCountL<punchDur) drvMotorL(min(ipowerL, punchSpd2N) +drvOffset); else drvMotorL(min(ipowerL, motorDeadbandNeg)+drvOffset); } else { drvMotorL(0); motorLdir = 0; } ipowerR = (int16_t) constrain(powerR * mechFactorR, -maxSpd, maxSpd); if (ipowerR > 0) { if (motorRdir == 1) punchCountR = constrain(++punchCountL, 0, 100); else punchCountR=0; motorRdir = 1; if (punchCountR<punchDur) drvMotorR(max(ipowerR, punchSpd2) +drvOffset); else drvMotorR(max(ipowerR, motorDeadband)+drvOffset); } else if (ipowerR < 0) { if (motorRdir == -1) punchCountR = constrain(++punchCountR, 0, 100); else punchCountR=0; motorRdir = -1; if (punchCountR<punchDur) drvMotorR(min(ipowerR, punchSpd2N)+drvOffset); else drvMotorR(min(ipowerR, motorDeadbandNeg)+drvOffset); } else { drvMotorR(0); motorRdir = 0; } } void drvMotorL(int16_t pwr) { #ifdef POLARITY drvMotor(MOTOR_L, pwr); #else drvMotor(MOTOR_L, -pwr); #endif } void drvMotorR(int16_t pwr) { #ifdef POLARITY drvMotor(MOTOR_R, pwr); #else drvMotor(MOTOR_R, -pwr); #endif } void drvMotor(byte adr, int16_t pwr) { //pwr -255 to 255 byte dir, st; if (pwr < 0) dir = 2; else dir =1; byte ipower=(byte) (abs(pwr)/4); if (ipower == 0) dir=3; //brake ipower = constrain (ipower, 0, 63); st = drv8830read(adr); if (st & 1) drv8830write(adr, 0, 0); drv8830write(adr, ipower, dir); } void drv8830write(byte adr, byte pwm, byte ctrl) { Wire.beginTransmission(adr); Wire.write(0); Wire.write(pwm*4+ctrl); Wire.endTransmission(true); } int drv8830read(byte adr) { Wire.beginTransmission(adr); Wire.write(1); Wire.endTransmission(false); Wire.requestFrom((int)adr, (int)1, (int)1); return Wire.read(); } void resetMotor() { drvMotor(MOTOR_R, 0); drvMotor(MOTOR_L, 0); } void resetVar() { power=0.0; moveTarget=0.0; spinDestination=0.0; spinTarget=0.0; spinRate=0.0; orientation=0.0; varAng=0.0; varOmg=0.0; varDst=0.0; varSpd=0.0; varIang=0.0; } void sendStatus () { Serial.print(millis()-time0); Serial.print(" state="); Serial.print(state); Serial.print(" accX="); Serial.print(accXdata); Serial.print(" ang=");Serial.print(varAng); Serial.print(" Pdur="); Serial.print(punchDur); Serial.print(" gyroY="); Serial.print(gyroYdata); Serial.print(" MFL="); Serial.print(mechFactorL); Serial.print(" MFR="); Serial.print(mechFactorR); Serial.print(", "); Serial.print(millis()-time0); Serial.println(); }[/mw_shl_code] |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








