|
36971| 20
|
[项目] 基于KNN算法的智能分类垃圾桶模型设计与制作 |

|
本帖最后由 hnyzcj 于 2020-6-24 16:52 编辑 南师附中树人学校:唐羽萱 【项目背景】 2019年可以说是中国垃圾分类的元年,因为在这一年“上海垃圾分类于7月1日正式施行。”而目前普遍使用的分类垃圾桶只是通过颜色和标签指示分类信息,在上海市垃圾分类试行期间,居委会大妈会站在公共垃圾桶旁边指导,“你是什么垃圾?”成为市民每天不得不经受的拷问。在这样一个大背景下,人们迫切需要一台能够智能分类的垃圾桶。于是我们设计了一款基于KNN算法的智能分类垃圾桶模型。  【项目展示】  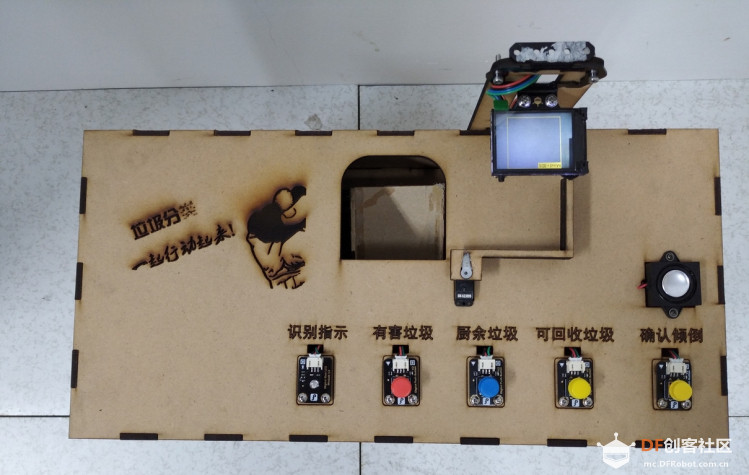 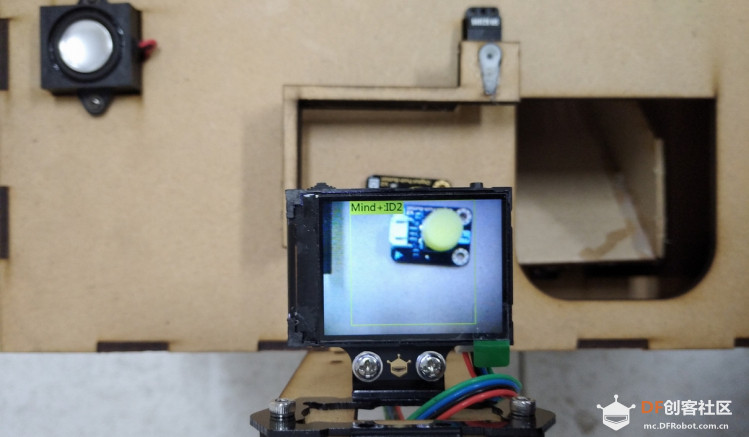 【功能简介】 (1)基于KNN算法识别,进行垃圾分类。 (2)将垃圾放入识别区后,垃圾桶智能识别,分区投放。 (3)当出现无法识别的垃圾后,人工强制学习识别。 (4)灯光指示、语音播报,让垃圾分类投放更简单。 【器材列表】
【制作过程】 1.KNN算法 KNN(k-nearest neighbors)作为一个入门级模型,既简单又可靠,对非线性问题支持良好,虽然需要保存所有样本,但是仍然活跃在各个领域中,并提供比较稳健的识别结果。KNN就是在特征空间中找出最靠近测试样本的k个训练样本,然后判断大多数属于某一个类别,那么将它识别为该类别。 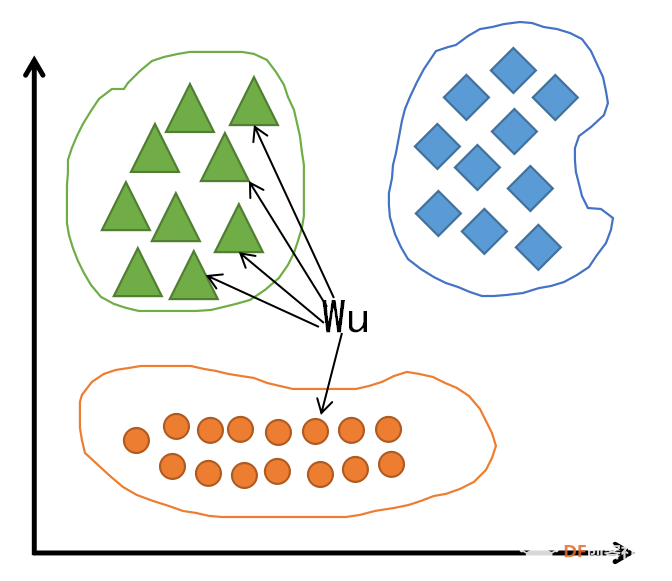 针对测试样本 Wu,想要知道它属于哪个分类,就先for 循环所有训练样本找出离 Wu 最近的 K个邻居(假设k=5),然后判断这 K个邻居中,大多数属于哪个类别,就将该类别作为测试样本的预测结果,如上图有4个邻居是橙色,1个是绿色,那么判断Wu的类别为“红色”。 2.系统设计 我们设计的这款智能分类垃圾桶具备学习能力,可以通过学习记录相关垃圾分类,从而能够做到智能识别分类。并通过相应机械结构,把不同类的垃圾自动投放不同的垃圾桶中。对于垃圾桶不能识别的垃圾,可以通过人工方式强制定义所属类别,然后在进行垃圾分类投放。 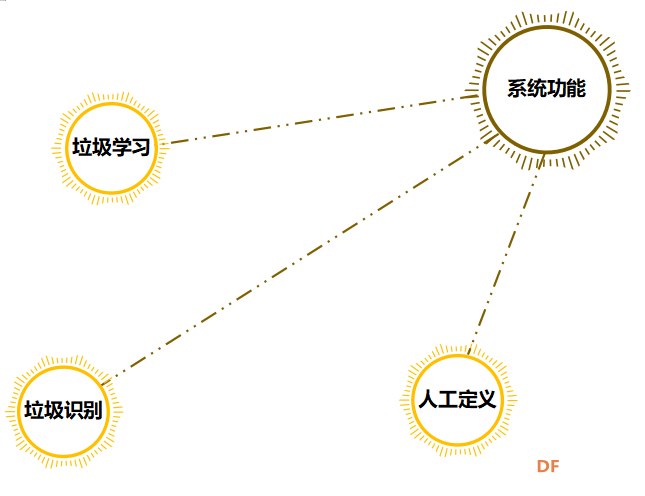 使用流程:定义垃圾分类,垃圾学习初始化——垃圾识别(可识别的垃圾)—— 2.结构设计 垃圾桶结构设计我将其划分三部分,第一部分是垃圾桶结构,第二部分垃圾分类投放结构,第三部分视觉识别传感器支架结构。本次结构件设计采用lasermaker设计,激光切割出相关结构件。 (1)垃圾桶结构设计 垃圾桶整体结构设计上,采用Lasermake中的快速造盒功能,生成一个盒体的快速原型,再对其细节进行修改,具体如下所示: 后背板:在背板位置上增加传感器支架固定孔位(①处),主控安装孔位(②处)和分类投放装置固定件支架孔位(③处)。 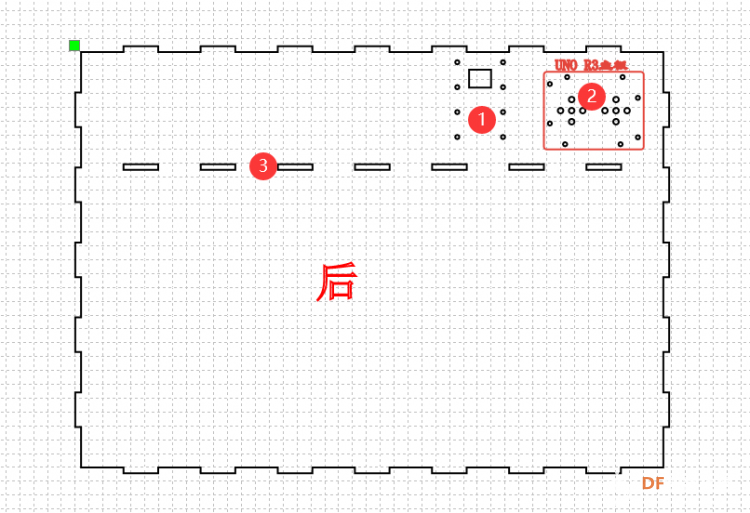 左右侧板:左右侧板修改如下所示,右侧板留有主控的外置电源接孔和分类投放装置固定件支架孔位(①处),左侧板留有分类投放装置固定件支架孔位(②处) 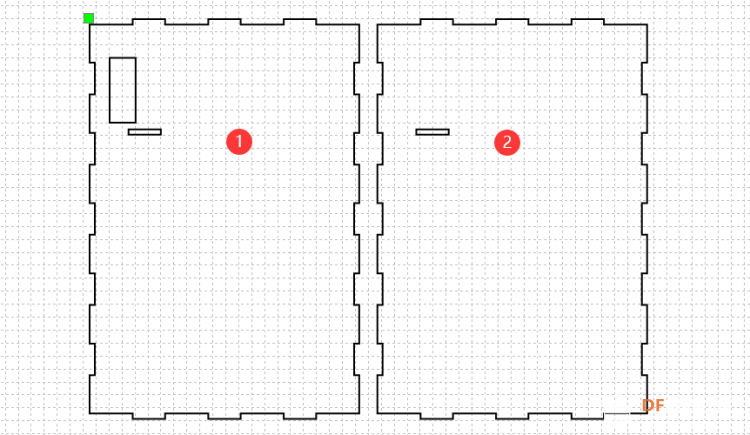 前面板:前面板修改如下图所示,主题装饰画,由外部导入(①处),垃圾入口处(②处),舵机安装孔(③处),喇叭安装孔(④处)按钮及指示灯安装孔(⑤处)。 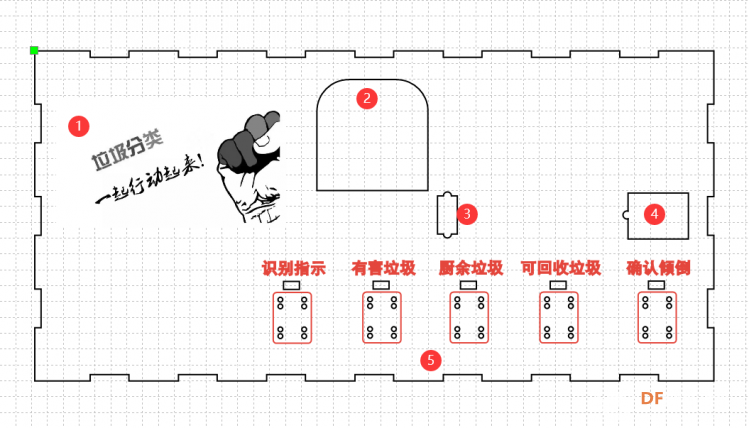 分类投放支架:传感器支架修改如下所示,垃圾推送舵机安装孔位(①处),分类投放装置旋转空间(②处)。 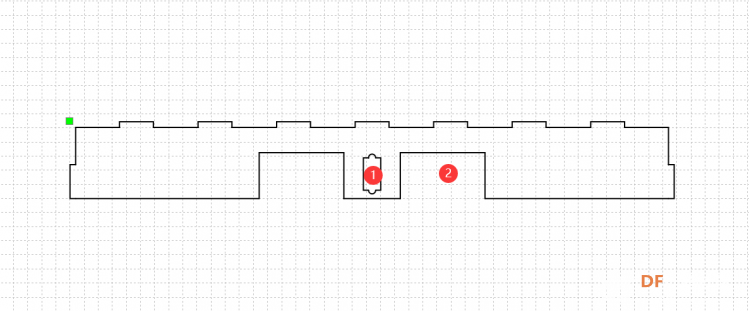 垃圾桶前挡板:垃圾桶前挡板添加标题“二哈垃圾桶”。 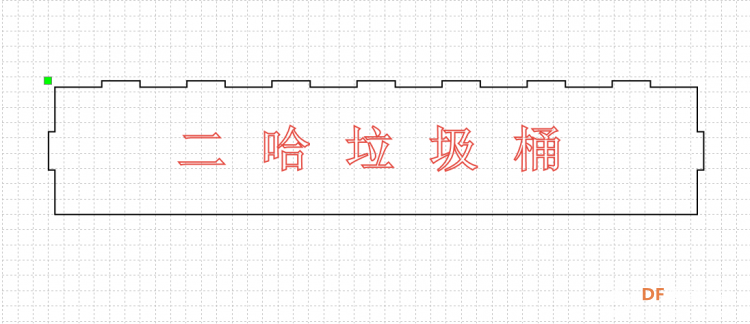 分类垃圾桶:三个分类垃圾桶设计如下,采用前高后低的设计,确保垃圾可以落入垃圾桶内。前面板分别倒入图片形成雕刻图案(如①⑥),底板(②),后背板(③),左右侧板(④⑤)。 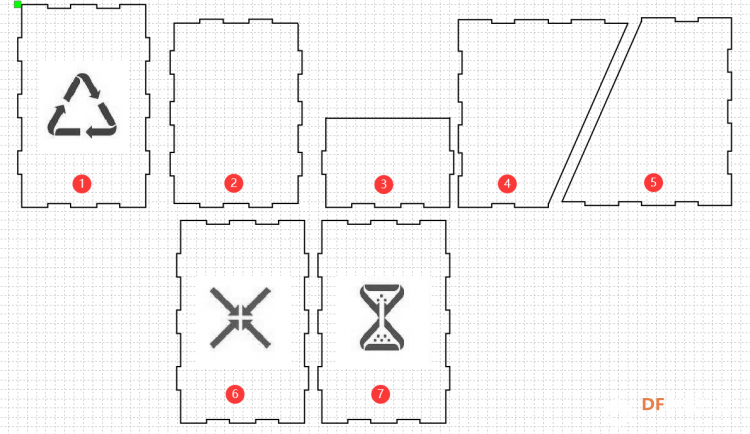 垃圾推送结构:垃圾推送结构是使用舵机把识别出的垃圾推送至垃圾口内。推送杆(如①),增厚片(②) 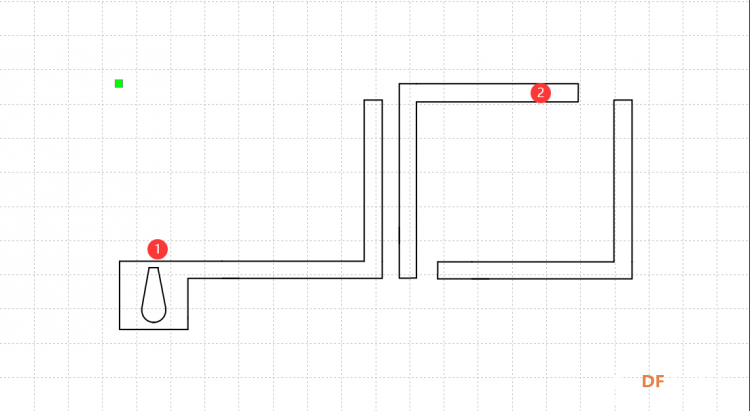 (2)分类投放结构设计:分类投放机械结构由舵机带动导流槽转向不同角度,向不同的垃圾桶倾倒垃圾。由于导流槽与舵机之间通过一个等腰直角的三角形连接件固定(如③)。因此导流槽左右侧导板,接近垃圾倾倒口处设计成切割掉一部分(如①处),导流槽底板设计(如②)。 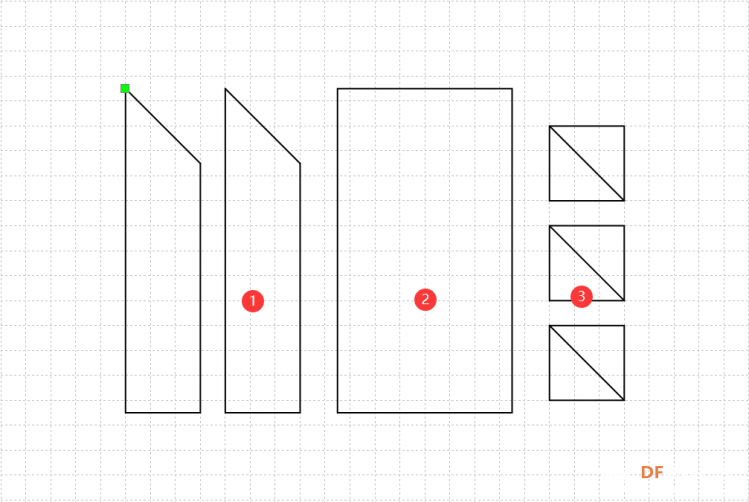 (3)视觉识别传感器支架结构设计:视觉识别传感器支架,可以调整视觉传感器与待识别垃圾之间的距离。固定视觉识别传感器孔位在①处,调整高度孔在②处。 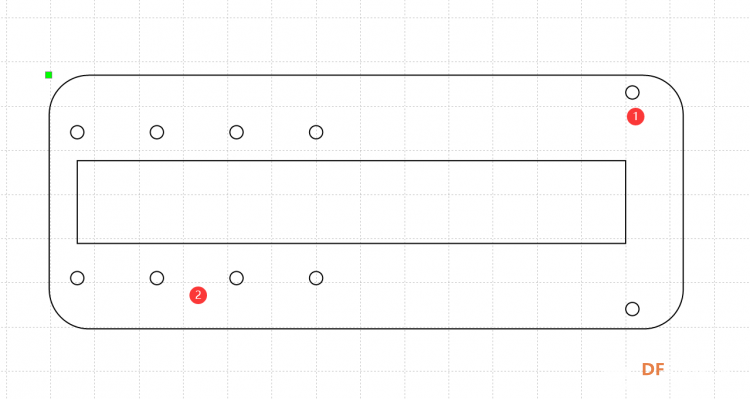 3.电路连线 系统电路连接如图所示,HuskyLens AI视觉识别传感器接I2C口,LED接D10口(识别指示灯),确认倾倒按钮接D9口,定义有害垃圾按钮接D7口,定义厨余垃圾按钮接D6口,定义可回收垃圾接D5口,分类投放舵机接D3口,推送垃圾的舵机接D12口。 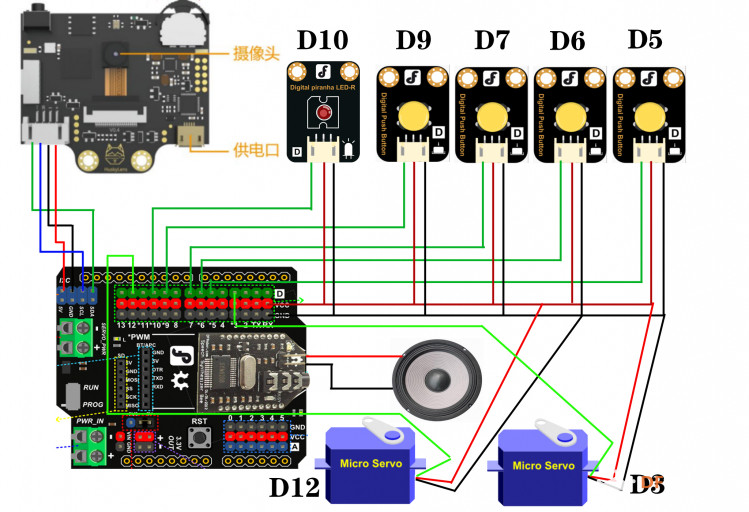 5.代码编写 代码编写如下所示分为系统主程序和有害垃圾、厨余垃圾、可回收垃圾、定义处理四段子程序。 [mw_shl_code=actionscript3,false]*! * MindPlus * uno * */ #include <DFRobot_Servo.h> #include <DFRobot_SYN6288.h> #include <DFRobot_HuskyLens.h> // 函数声明 void DF_YouHaiLaJi(); void DF_DingYiChuLi(); void DF_ChuYuLaJi(); void DF_KeHuiShouLaJi(); // 创建对象 Servo servo_3; Servo servo_12; DFRobot_HuskyLens huskylens; DFRobot_SYN6288 syn6288; // 主程序开始 void setup() { servo_3.attach(3); servo_12.attach(12); huskylens.beginI2CUntilSuccess(); huskylens.writeAlgorithm(ALGORITHM_OBJECT_CLASSIFICATION); syn6288.begin(&Serial, 0, 1, 4); syn6288.setVolume(true, 16); syn6288.playText("智能垃圾分类", 0); delay(3000); } void loop() { huskylens.request(); huskylens.clearOSD(); if (huskylens.isAppear(2,HUSKYLENSResultBlock)) { if ((digitalRead(9)==1)) { DF_YouHaiLaJi(); } else { DF_DingYiChuLi(); } } if (huskylens.isAppear(3,HUSKYLENSResultBlock)) { if ((digitalRead(9)==1)) { DF_KeHuiShouLaJi(); } else { DF_DingYiChuLi(); } } if (huskylens.isAppear(4,HUSKYLENSResultBlock)) { if ((digitalRead(9)==1)) { DF_ChuYuLaJi(); } else { DF_DingYiChuLi(); } } if (huskylens.isAppear(1,HUSKYLENSResultBlock)) { huskylens.clearOSD(); delay(1000); huskylens.writeOSD(String(" identification;"), 114, 35); } } // 自定义函数 void DF_YouHaiLaJi() { servo_3.angle(abs(45)); delay(1000); servo_12.angle(abs(0)); digitalWrite(10, HIGH); huskylens.writeOSD(String("Harmful waste"), 114, 35); syn6288.playText("有害垃圾", 0); delay(2000); digitalWrite(10, LOW); servo_3.angle(abs(90)); delay(1000); servo_12.angle(abs(90)); } void DF_DingYiChuLi() { if ((digitalRead(5)==1)) { huskylens.learnOnece(2); } if ((digitalRead(6)==1)) { huskylens.learnOnece(3); } if ((digitalRead(7)==1)) { huskylens.learnOnece(4); } } void DF_ChuYuLaJi() { servo_3.angle(abs(90)); delay(1000); servo_12.angle(abs(0)); digitalWrite(10, HIGH); huskylens.writeOSD(String(" kitchen waste"), 114, 35); syn6288.playText("厨余垃圾", 0); delay(2000); digitalWrite(10, LOW); servo_3.angle(abs(90)); delay(1000); servo_12.angle(abs(90)); } void DF_KeHuiShouLaJi() { servo_3.angle(abs(135)); delay(1000); servo_12.angle(abs(0)); digitalWrite(10, HIGH); huskylens.writeOSD(String("Recyclable waste"), 114, 35); syn6288.playText("可回收垃圾", 0); delay(2000); digitalWrite(10, LOW); servo_3.angle(abs(90)); delay(1000); servo_12.angle(abs(90)); } [/mw_shl_code] 6.设备组装 第1步:拿出识别指示LED用螺丝螺母固定如下图所示,将LED模块电路板垫高一断距离,避免电路板上的焊点与垃圾桶体直接接触。 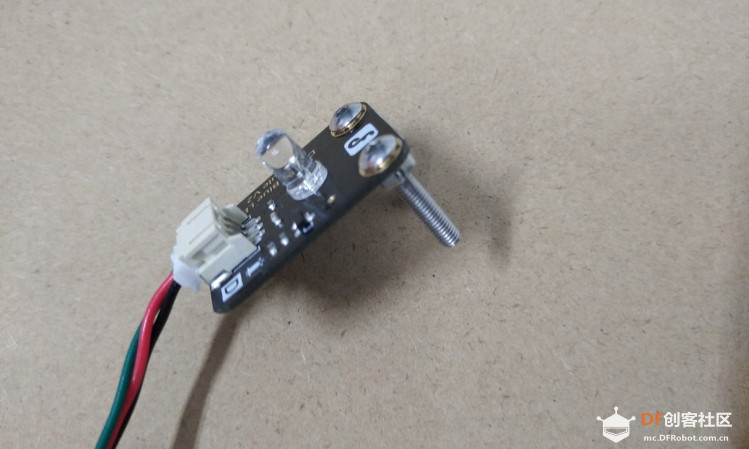 图20垫高模块电路板 第2步:将上步中的LED按垃圾桶前面板对应孔位装入,再拿出2个螺母将其固定。 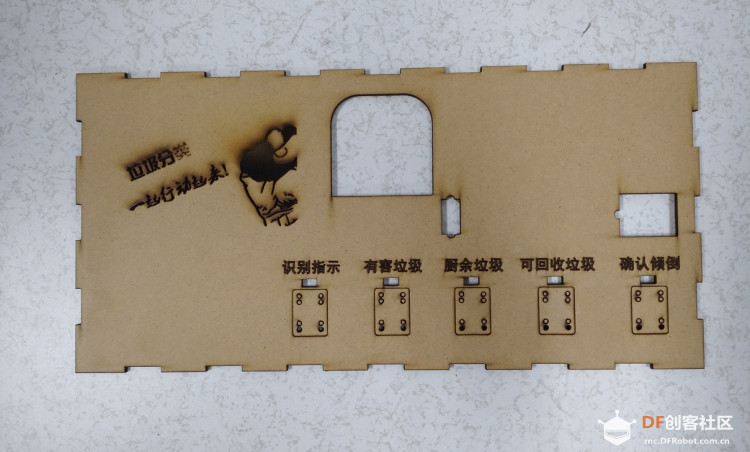  图21固定LED模块 第3步:依次对几个按钮按上述方法进行安装在前面板上。 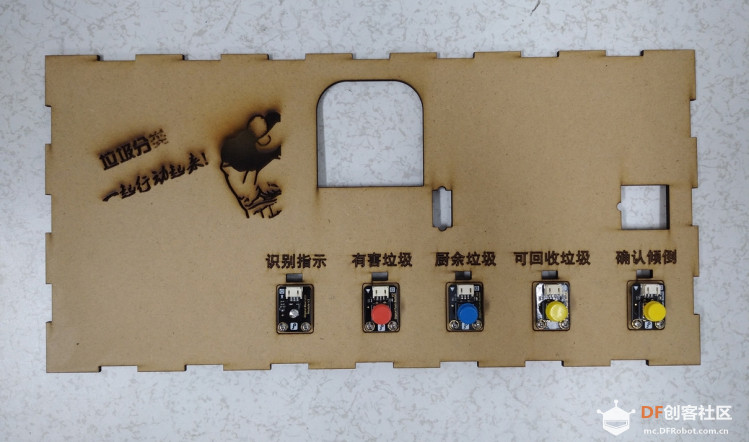 图22安装各按钮 第4步:将舵机和音箱安装到前面板上。 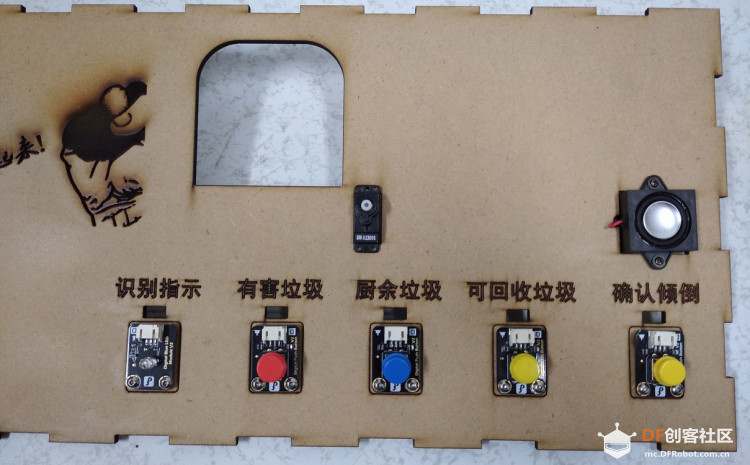 图23安装舵机和音箱 第5步:取出舵机舵棒,将其放入垃圾推送结构中,并用胶水粘贴增厚片如下图所示。  图24安装舵棒   图25胶水粘贴增厚片 第6步:将第5步中安装好的垃圾推送结构,安装到前面板舵机上。 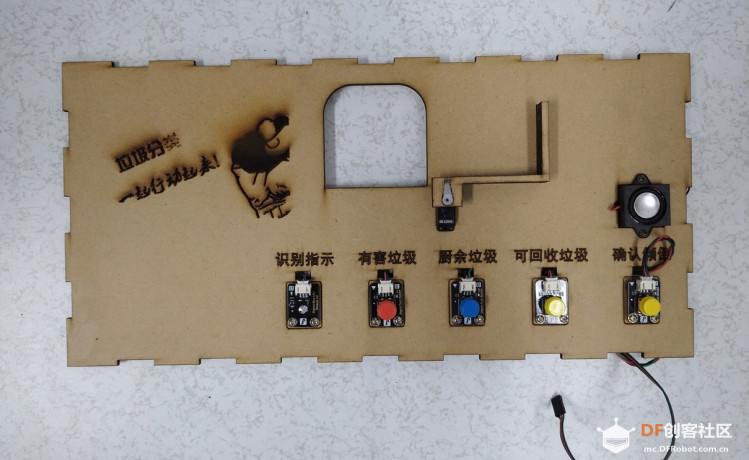 图26安装推送结构 第7步:取出后背板和Arduino Uno主控器,先在背板上对应Uno的孔位,固定铜柱。 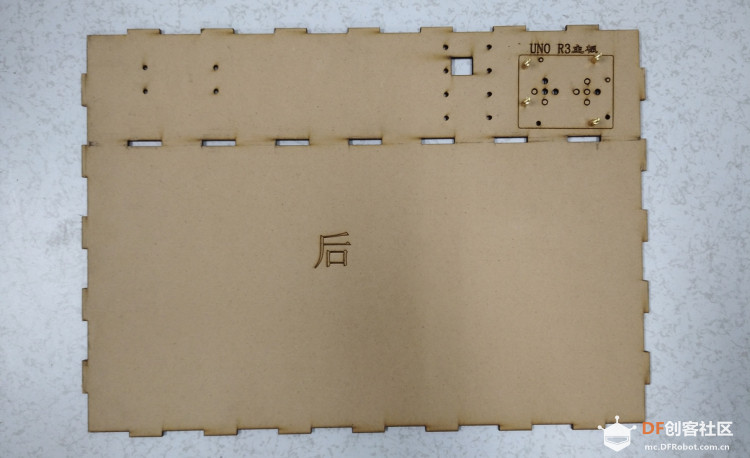 图27固定Uno的铜柱 第8步:将Uno主控对应卡在铜柱上,用螺丝固定。再拿出拓展板叠加到Arduino主控之上。 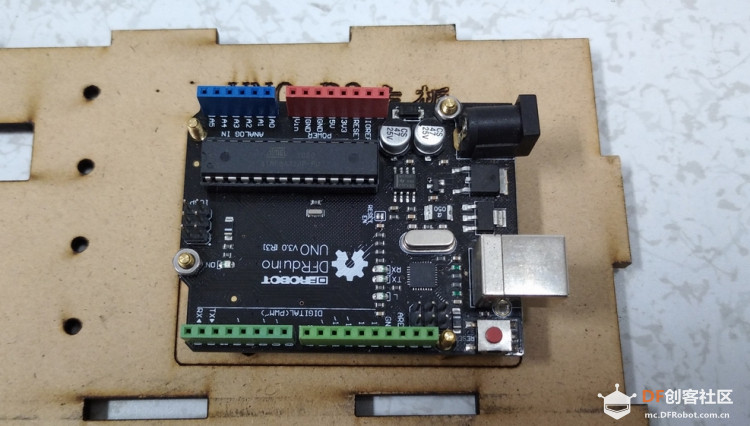 图28固定Arduino主控 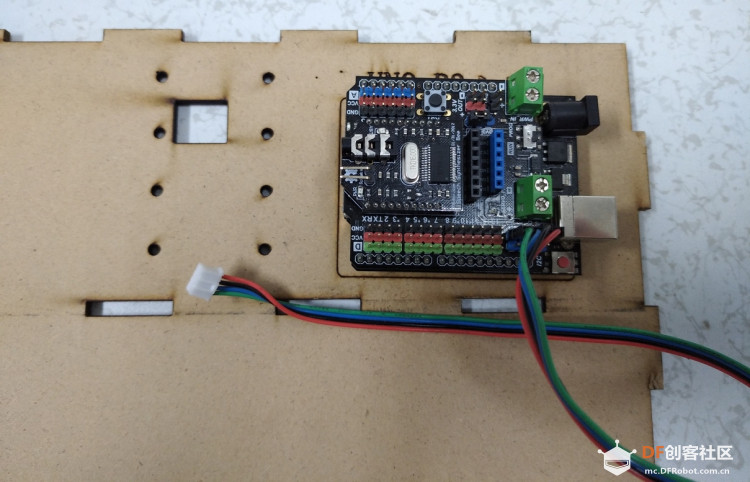 图29叠加拓展板 第9步:拿出HuskyLens AI 视觉传感器及支撑架、螺丝及调整支架  图30固定HuskyLens AI 视觉传感器 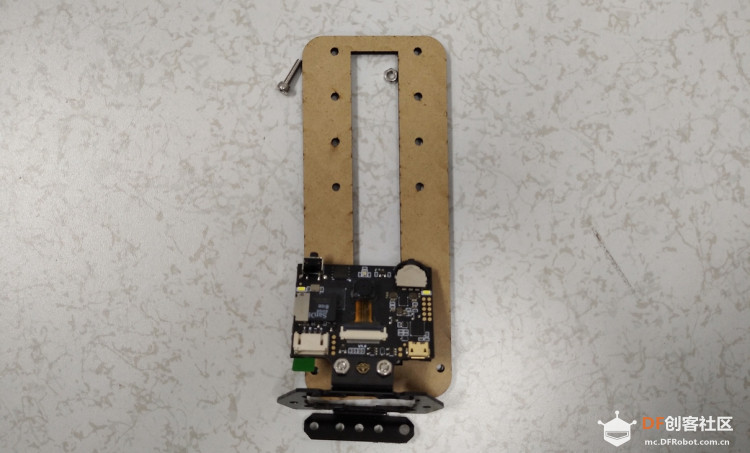 图31安装再调整支撑架上 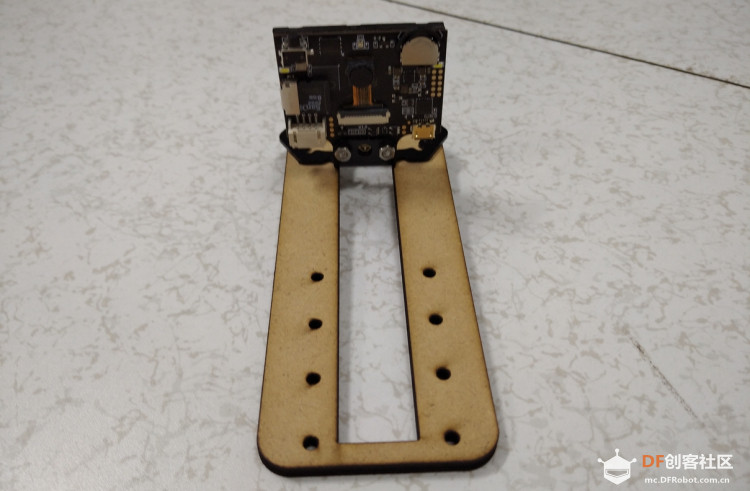 图32 第10步:将第9步中的HuskyLens AI 视觉传感器组合体与后背板选择合适的安装孔位进行安装。 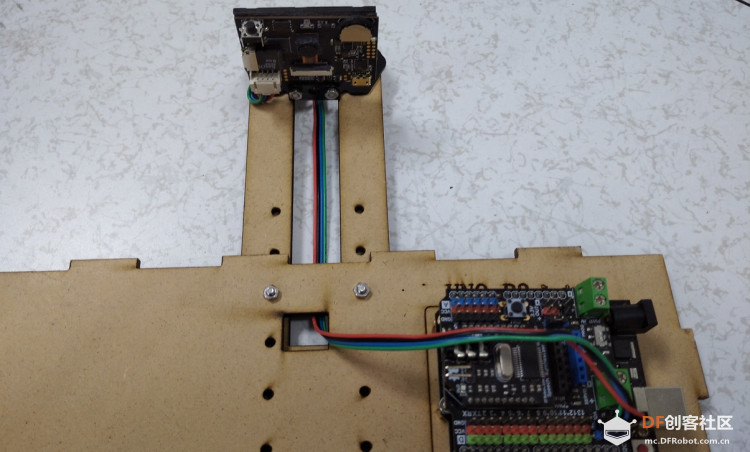 图33固定HuskyLens AI 视觉传感器 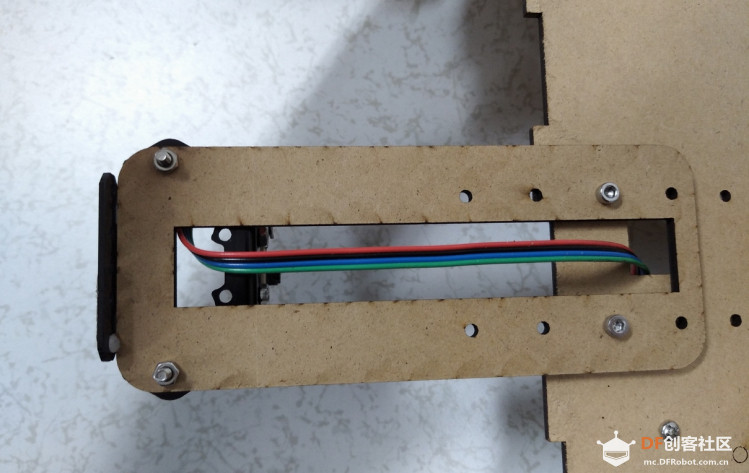 图34从垃圾桶背板走线孔穿线与传感器连接 第11步:拿出分类投放机构固定件安装在后背板上。 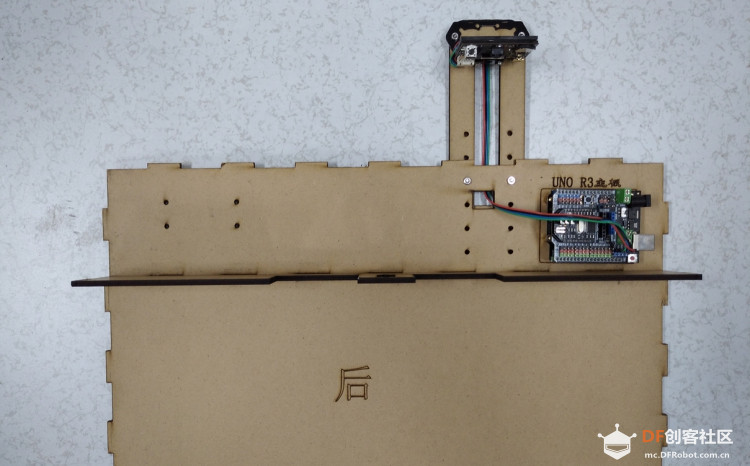 图35安装分类头饭机构固定件 第12步:组装垃圾分类投放结构,用热熔胶将垃圾分类投放结构件组合成导流槽。再将连接件与舵机导流槽粘合成一体。 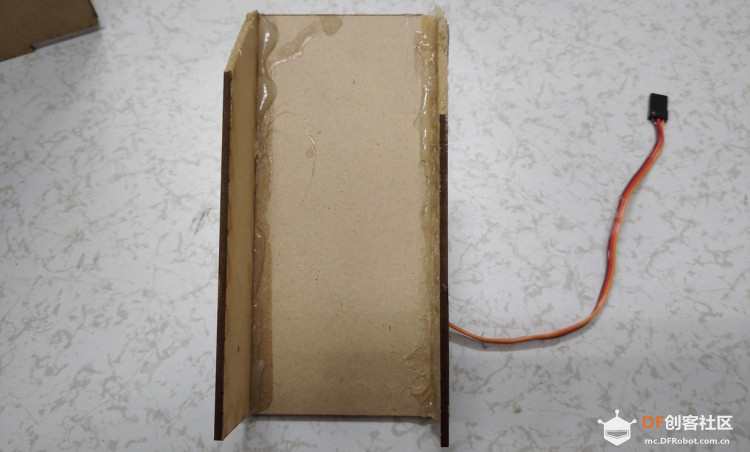 图36热熔胶粘和导流槽 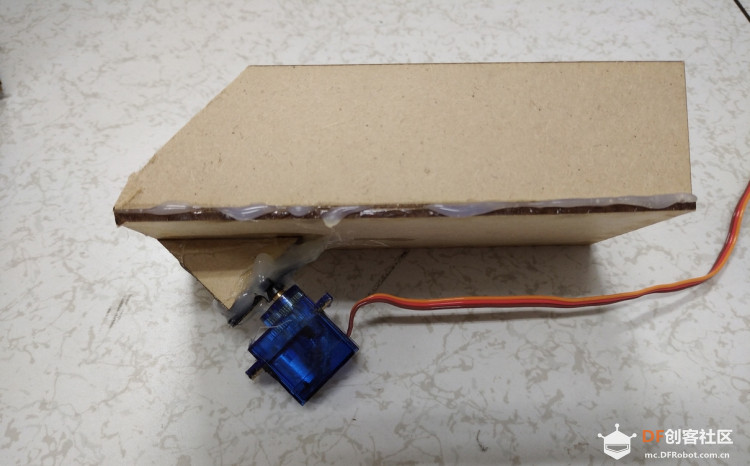 图37组装垃圾分类结构 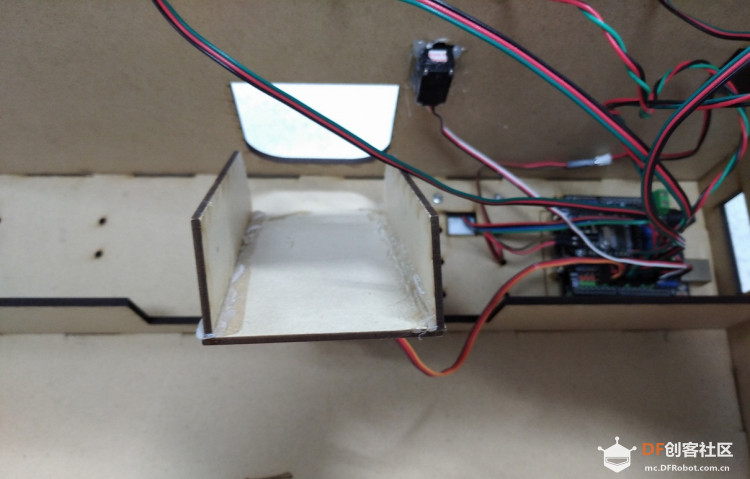 图38安装垃圾分类机构 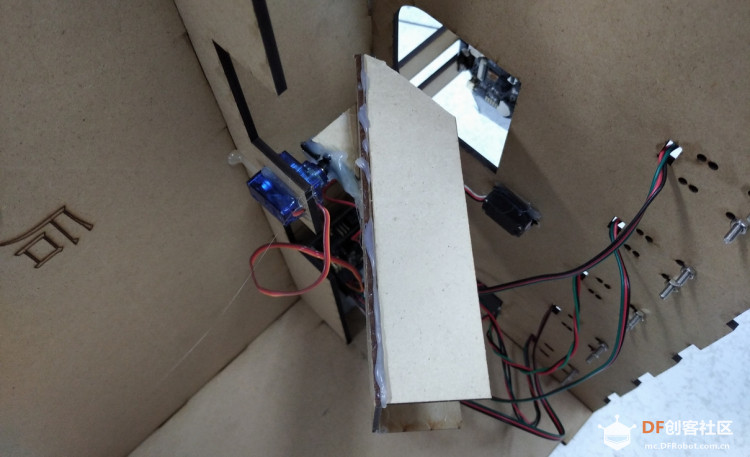 图39注意安装时,电路连线整理整齐。 第13步:安装垃圾桶前档板  图40安装垃圾桶前挡板 第14步:将切割好的垃圾桶结构件组装成不同的桶。 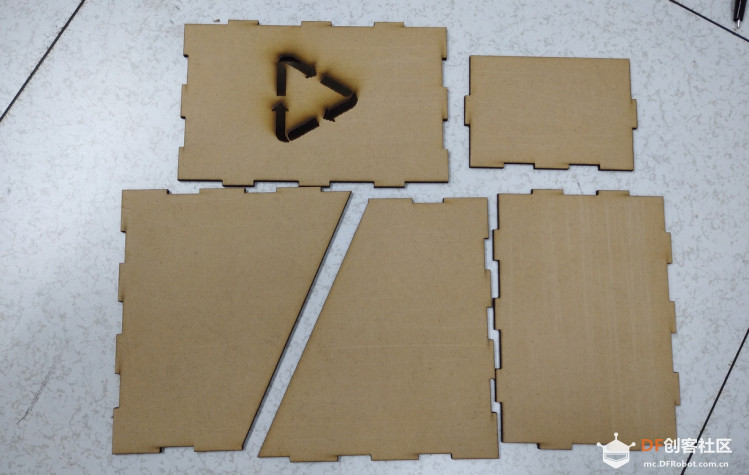  第15步:垃圾桶整体组装完成。  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






