本帖最后由 5oliuLt0 于 2024-4-12 18:30 编辑
FireBeetle 2 ESP32 C6 拿到手也有一段时间了, 手上有一块带BMI160 的扩展板子,可以验证相关参数;
硬件扩展板子为Infineon CY8CKIT-028-TFT; 板载资源还是比较丰富,包括
1、2.4寸 240*320 8080 接口的LCD 屏;
2、BMI160 三轴加速度+三轴陀螺仪;
3、PDM 接口的PDM MIC
4、I2S 接口的Audio CODEC
本次验证BMI160 ;
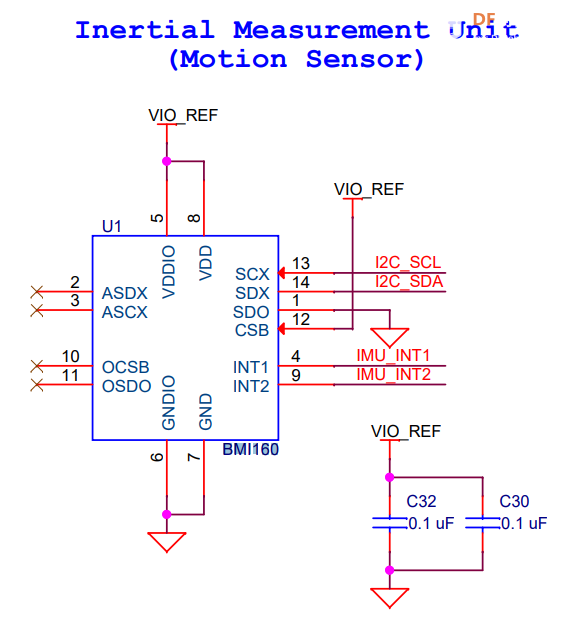
扩展包为I2C 接口模式;
直接采用BMI160 库文件;
- #include <BMI160Gen.h>
-
- const int select_pin = 10;
- const int i2c_addr = 0x68;
-
-
- void setup() {
- Serial1.begin(115200); // initialize Serial communication
-
- // initialize device
- Serial1.println("Initializing IMU device...");
- //BMI160.begin(BMI160GenClass::SPI_MODE, /* SS pin# = */10);
- BMI160.begin(BMI160GenClass::I2C_MODE);
- uint8_t dev_id = BMI160.getDeviceID();
- Serial1.print("DEVICE ID: ");
- Serial1.println(dev_id, HEX);
-
- // Set the accelerometer range to 250 degrees/second
- BMI160.setGyroRange(250);
- Serial1.println("Initializing IMU device...done.");
- }
-
- void loop() {
- int gxRaw, gyRaw, gzRaw; // raw gyro values
- float gx, gy, gz;
-
- // read raw gyro measurements from device
- BMI160.readGyro(gxRaw, gyRaw, gzRaw);
-
- // convert the raw gyro data to degrees/second
- gx = convertRawGyro(gxRaw);
- gy = convertRawGyro(gyRaw);
- gz = convertRawGyro(gzRaw);
-
- // display tab-separated gyro x/y/z values
- Serial1.print("g:\t");
- Serial1.print(gx);
- Serial1.print("\t");
- Serial1.print(gy);
- Serial1.print("\t");
- Serial1.print(gz);
- Serial1.println();
-
- delay(500);
- }
-
-
- float convertRawGyro(int gRaw) {
- // since we are using 250 degrees/seconds range
- // -250 maps to a raw value of -32768
- // +250 maps to a raw value of 32767
-
- float g = (gRaw * 250.0) / 32768.0;
-
- return g;
- }
-
-
-
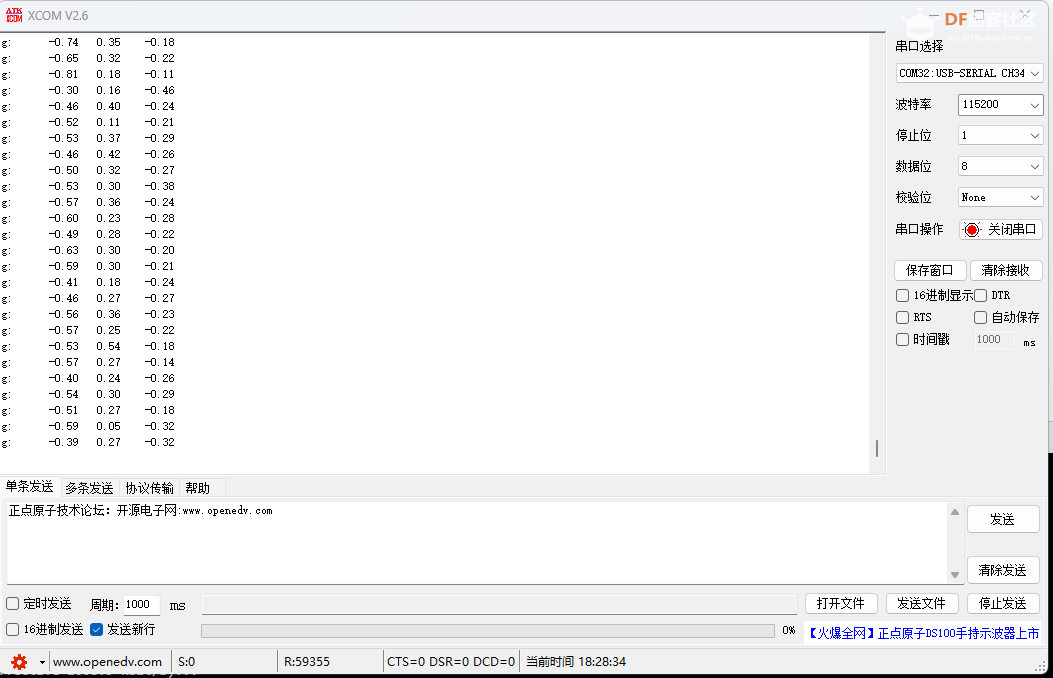
添加代码,编译,下载输出;
| 


 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






