本帖最后由 Zer0 于 2015-3-3 16:42 编辑
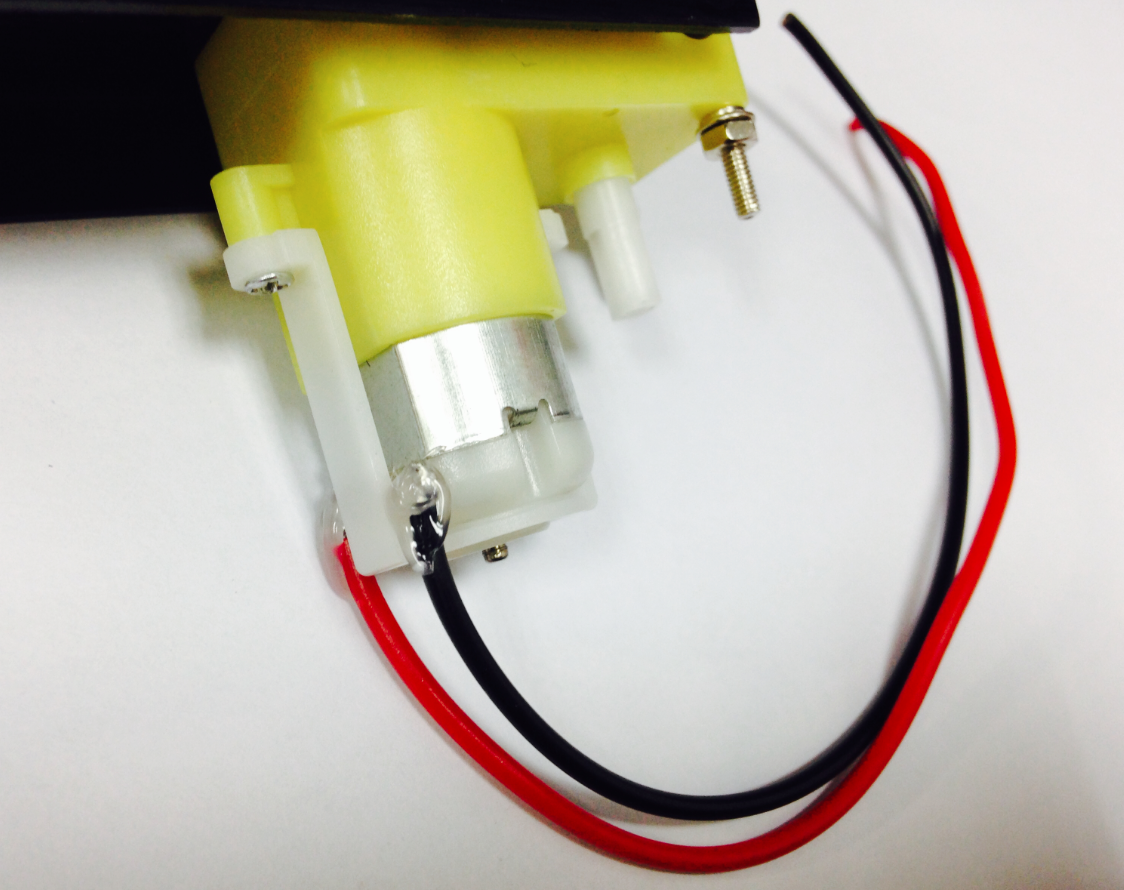
Devastator Tank Mobile Platform 履带 机器人是DFRobot 研制的机器人实验平台,该平台不但可以使用当前流行的 Arduino控制器,也可以使用Raspberry pi等其他控制器控制。 机身采用高强度铝合金材料,高速电机加优质塑料履带,运动灵活快速,性能卓越的悬挂系统能让机器人轻松的翻越障碍物,适应大部分不规则场地。 履带机器人平台机身设计多种安装孔,兼容各种传感器、舵机、云台和主控板控制器安装(例如Romeo控制器、Raspberry Pi控制器),非常适合机器人比赛以及其相关研究项目。 材料清单 平台搭建 硬件组装 步骤一: 电机线的焊接 焊接好后

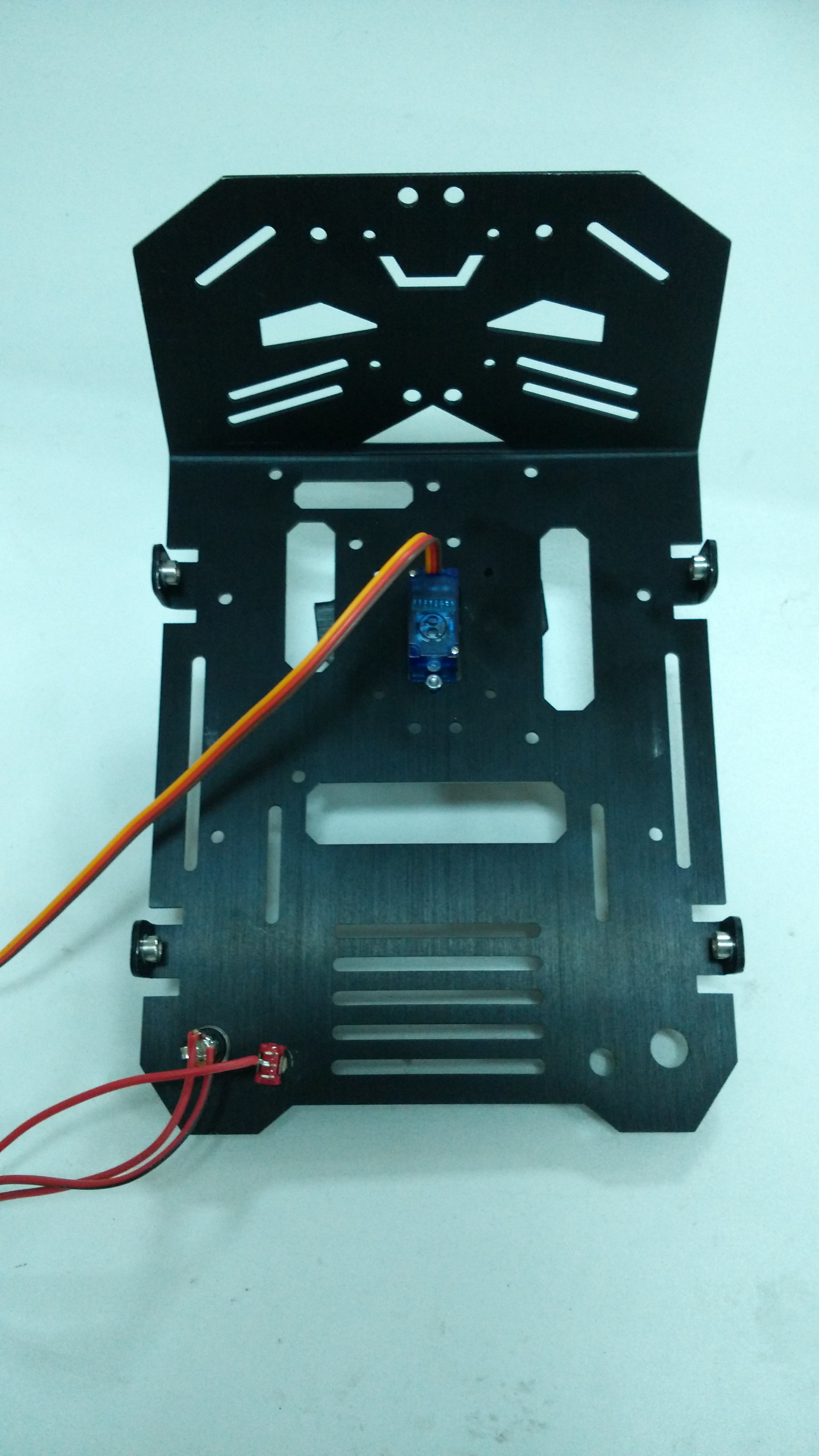
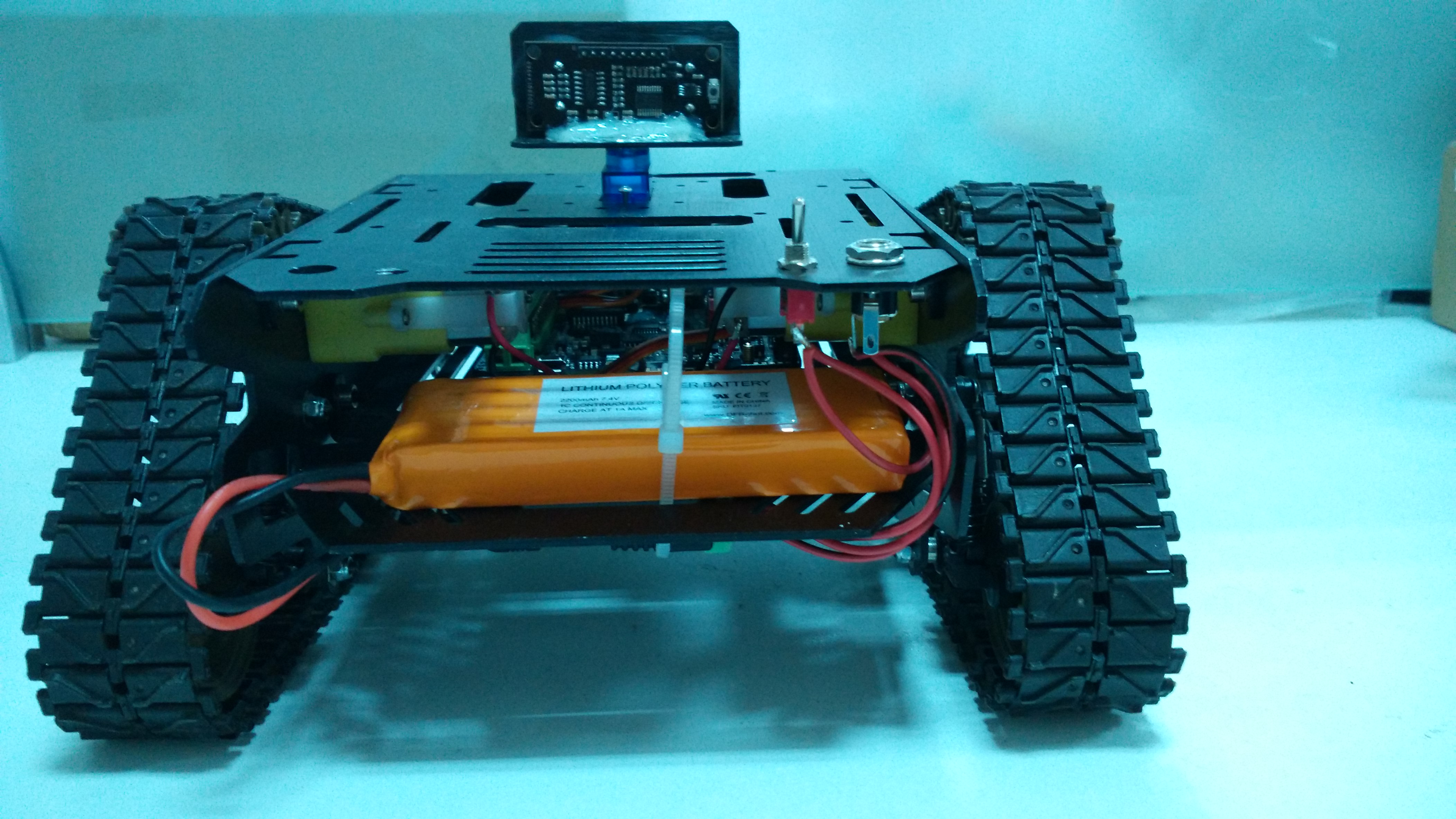
安装超声波传感器和舵机组成多方位障碍扫描
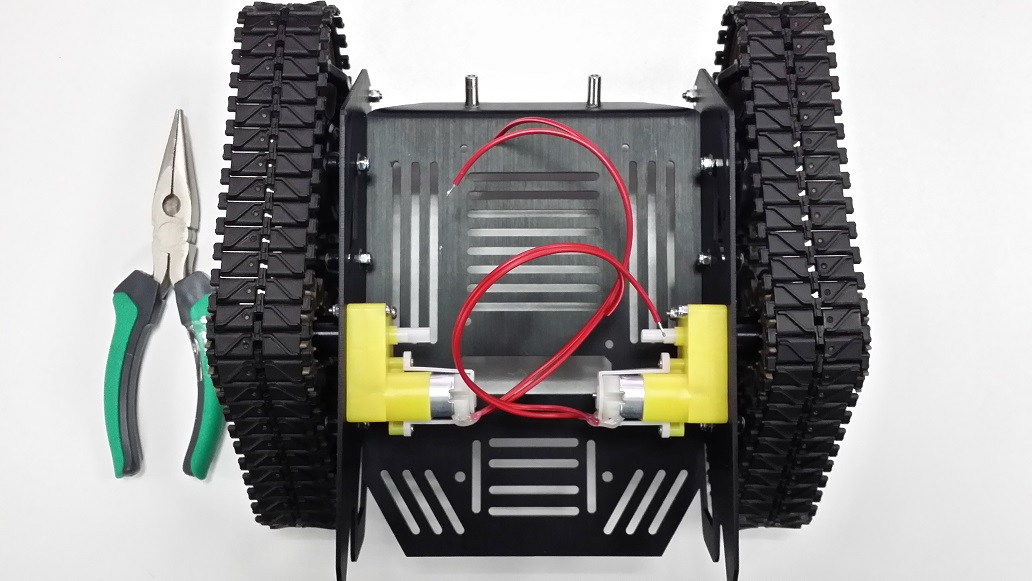
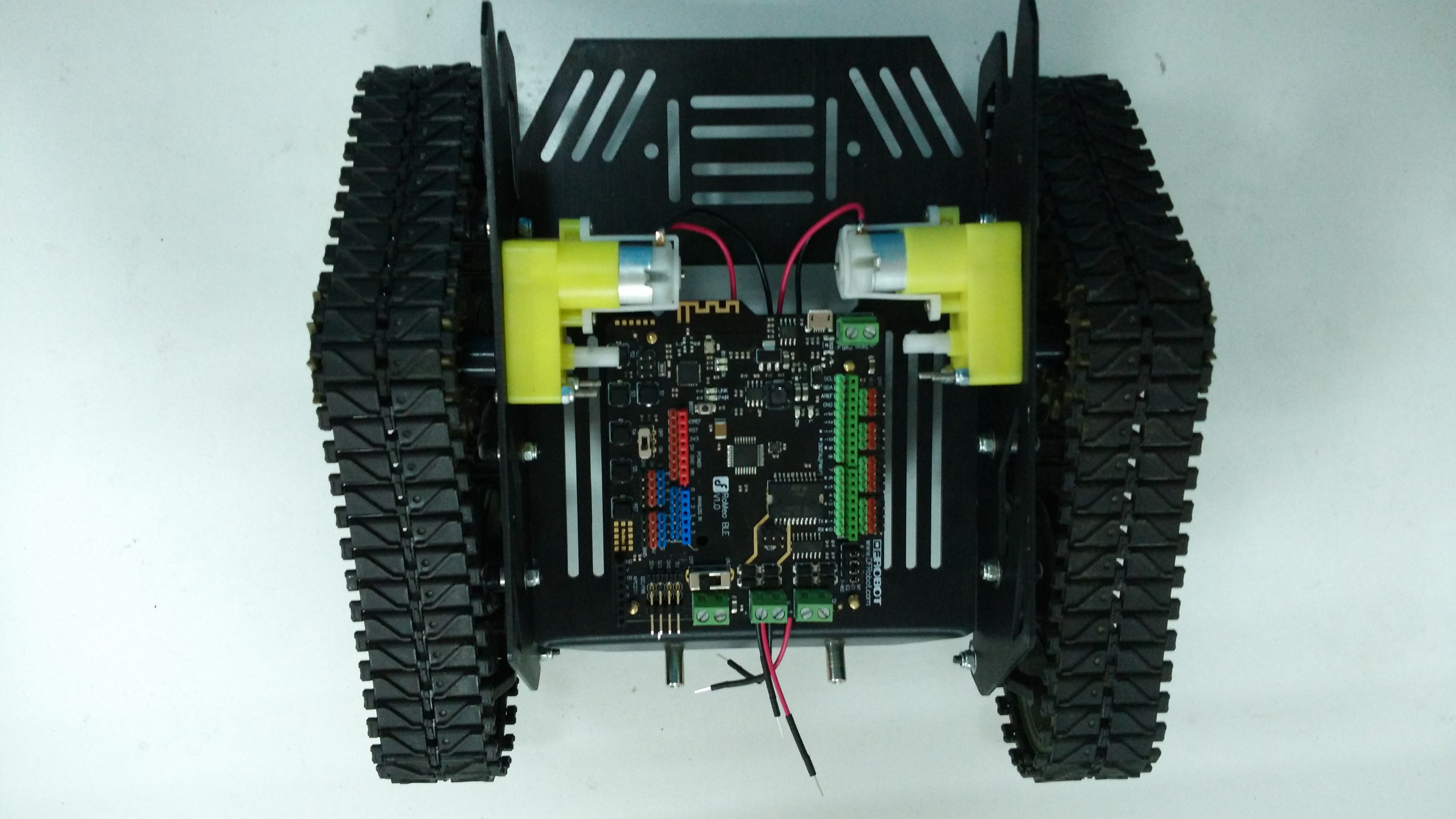
安装主控板及电机接线 全部安装好之后将上面面板合上,注意这里最好将电源线留长一些,方便取下上面板 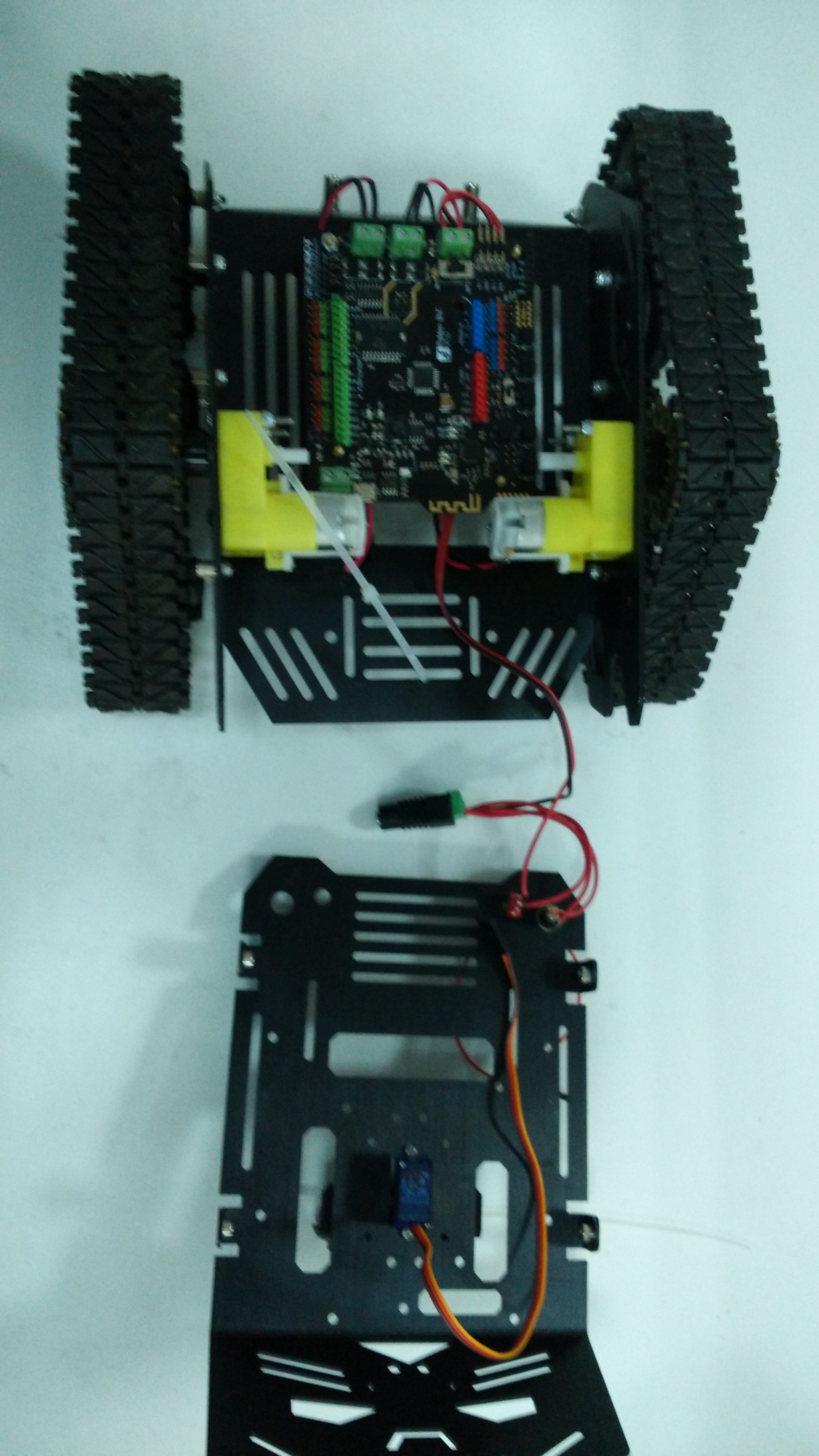
最后的效果图
蓝牙手柄控制示例代码
- int E1 = 5; //定义M1使能端
- int E2 = 6; //定义M2使能端
- int M1 = 4; //定义M1控制端
- int M2 = 7; //定义M1控制端
-
- int databuf[11]={};
-
- void Stop(void){ //停止
- digitalWrite(E1,LOW);
- digitalWrite(E2,LOW);
- }
-
- void Advance(char a,char b){ //前进
- analogWrite (E1,a); //PWM调速
- digitalWrite(M1,LOW);
- analogWrite (E2,b);
- digitalWrite(M2,LOW);
- }
- void Back_off (char a,char b) { //后退
- analogWrite (E1,a);
- digitalWrite(M1,HIGH);
- analogWrite (E2,b);
- digitalWrite(M2,HIGH);
- }
- void Turn_L (char a,char b) { //左转
- analogWrite (E1,a);
- digitalWrite(M1,LOW);
- analogWrite (E2,b);
- digitalWrite(M2,HIGH);
- }
- void Turn_R (char a,char b) { //右转
- analogWrite (E1,a);
- digitalWrite(M1,HIGH);
- analogWrite (E2,b);
- digitalWrite(M2,LOW);
- }
- void setup(void) {
- int i;
- for(i=4;i<=7;i++)
- pinMode(i, OUTPUT);
- Serial.begin(115200); //设置串口波特率
- }
- long previousMillis = 0; //用于存储先前的时间
- long interval = 300; //间隔时间300MS,如果1秒后还没有收到控制命令小车停车待命
- unsigned long currentMillis; //读取到的当前时间
- int i;
- void loop(void) {
- currentMillis = millis();
- if(currentMillis - previousMillis > interval) //大于0.3秒没有收到串口命令自动停止小车
- {
- previousMillis = currentMillis;
- for( i = 0; i < 11; i++)
- {
- databuf[i] = 0;
- }
- Stop();
- }
- if(Serial.available()>0){
- for( i = 0; i < 11; i++)
- {
- databuf[i] = Serial.read();
- delay(2);
- }
- if(databuf[5] == 0x04)
- Advance (255,255); //PWM调速1
- else if(databuf[5] == 0x05)
- Back_off (255,255);
- else if(databuf[5] == 0x06)
- Turn_L (255,255);
- else if(databuf[5] == 0x07)
- Turn_R (255,255);
- else Stop();
- previousMillis = millis();
- }
- }
超声波避障示例代码 怎么没代码呢,源代码让楼主给弄掉了,不过好在我们的工程师有相同的应用
当然我们可以用这个手柄对小车做更多的玩法,比如通过遥杆控制小车的速度,通过超声波避障或者跟踪,欢迎小伙伴继续补充,后续我也会继续更新应用!吐槽一下这个电机吧,速度有点慢,真期待我们的旗舰版面世啊!
|
|
|
|
|
|
|
|
|
|



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







