|
30961| 13
|
Arduino小白教程第五弹 -- 舵机控制 |
|
原作者:Jane 授权转载 这次要接触到舵机。舵机是一种电机,它使用一个反馈系统来控制电机的位置。可以很好掌握角度。 找到以下材料
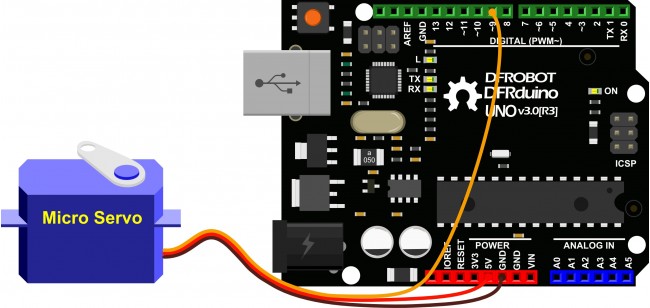 这个项目的连线很简单,只需按图10-1所示连接舵机三根线就可以了,连的时候注意线序,舵机引出三根线。一根是红色,连到+5V上。一根棕色(有些是黑的),连到GND。还有一根是黄色或者橘色,也有可能是白色的,连到数字引脚9。 输入代码 打开Arduino IDE,输入代码。 程序中还涉及了库中以下两个函数 设置引脚: myservo.attach(pin); 选用任意的数字引脚作为attach(pin)函数中的pin脚。 读取角度: myservo.write(pos); 该函数可以很方便的读到舵机当前角度值。 |
|
无畏青春 发表于 2014-5-23 14:46 你可以淘宝搜arduino入门套件之类的,不过我推荐https://www.dfrobot.com.cn/goods-149.html 都有配套的文字和视频教程,碰到问题也可以到论坛里请教 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 ARD DAY
ARD DAY






