|
30999| 26
|
Bluno Beetle免费试用 - 交作业 - 便携GPS |

|
在此之前, 制作过GPRS+GPS实时获取卫星坐标上传服务器, 显示轨迹的例子, 但很不幸地, 因未考虑车辆输出电流过大的问题, 测试几天后GPRS因电流过大烧(炸)了... 停滞了一段时间后, 正巧碰上DFRobot开展Bluno beetle免费试用被我申请试用成功!(在此感谢@Ashley), 于是把剩下的GPS ublox模块利用上, 主控换成Bluno beetle, 再加上一个普通的TF读卡模块开工!(这货适合于无手机, 或无手机信号时, 又需要记录GPS轨迹的地方)
使用场景介绍: 场景一: 室外,且无手机 场景二: 室外/室内, 有手机 最后通过WEB可以查看地图上的活动轨迹.
3D打印 - 设计 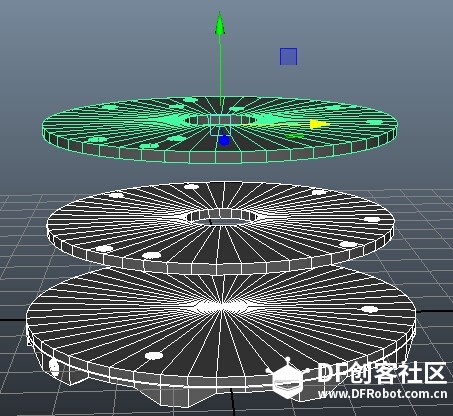 最初设计多层  第2版, 加高了底座 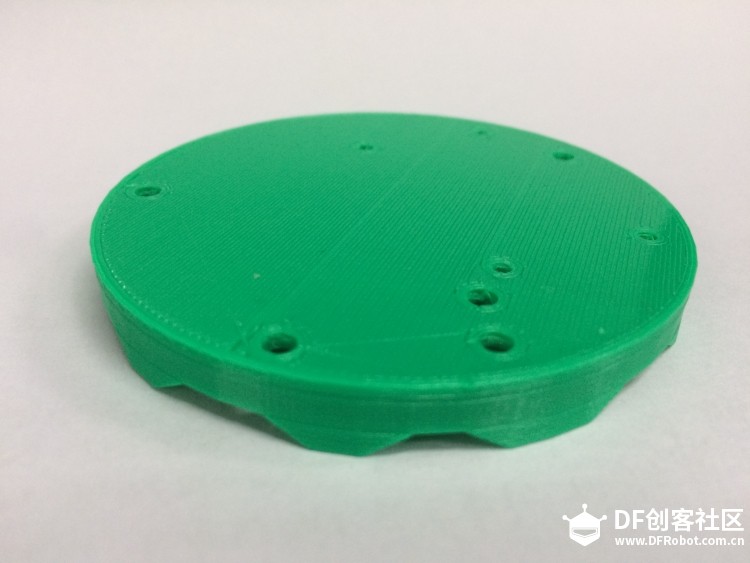 正面, GPS/TF模块螺丝孔 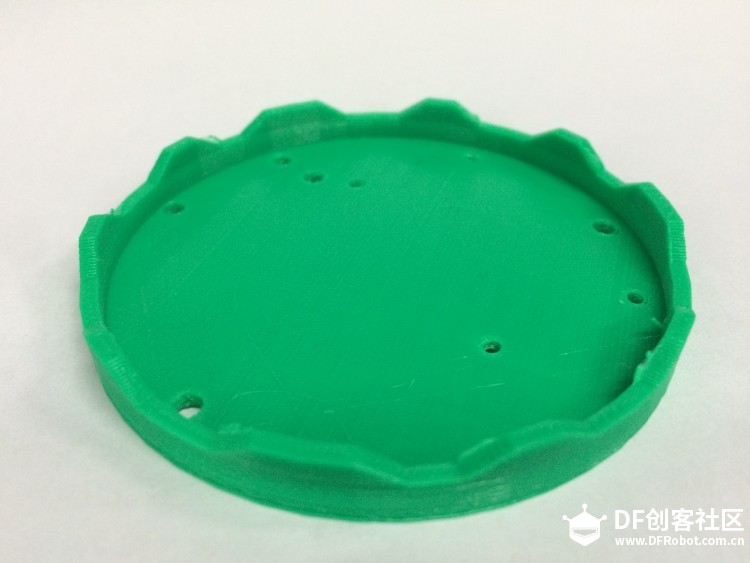 底面
接线设计:
Bluno Beetle TF模块(SPI) Bluno Beetle LED 附上Bluno Beetle的SPI接线图  此处焊点较小, 需小心处理  上一张焊接细节 程序: 这里主要讲几个细节, 有兴趣的小伙伴想要完整程序请在文后下载 1.在Setup里, 对TF卡模块需要检测有效性: 2.由于GPS接的是软串口, 考虑到串口监听的问题, 需要在调用GPS时先Listen一下: 3.GPS数据抓去以及模块的一些简单知识 从GPS模块中取数据代码如下(本例中只取$GPRMC数据): 4.蓝牙模块部分 4.1 手机App部分 4.2 便携GPS部分 - 蓝牙连接成功时, 开始上传TF卡中的数据, 上传成功的话自动清除本地数据. (...................代码上传多次,排版全乱,只好删除, 要看代码的请在文后下载)
 实物效果图 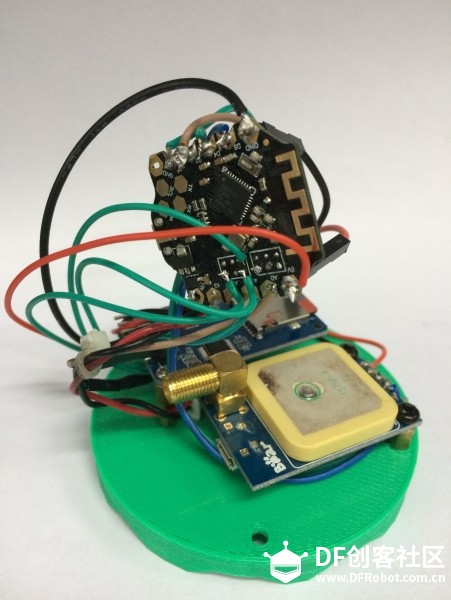 主控没螺丝孔, 暂时固定不了 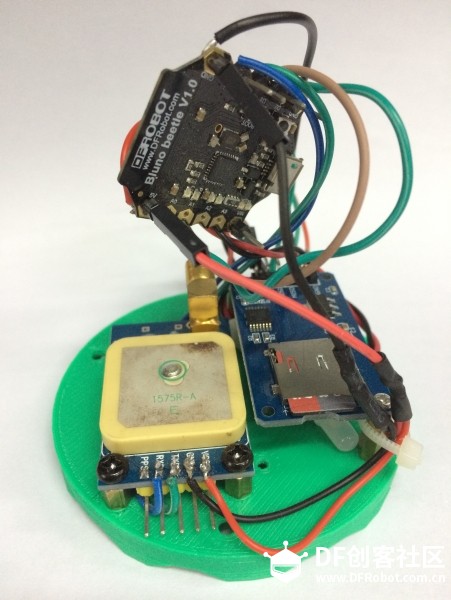 换个角度 最后展示一下周末收集的数据效果图  附上程序以及一些实用资料 |
李旭东 发表于 2017-11-16 09:43 是用了一个translateCallback的方法, 给你一个我用的样例代码 [mw_shl_code=applescript,true] translateCallback = function (data) { if (data.status === 0) { bm.clearOverlays(); bm.setCenter(data.points[0], 15); marker = new BMap.Marker(data.points[0]); bm.addOverlay(marker); marker.setAnimation(BMAP_ANIMATION_BOUNCE); //跳动的动画 var labelgg = new BMap.Label("i30现在的位置"+_center_time, {offset: new BMap.Size(20, -10)}); marker.setLabel(labelgg); } } var _center_lat = 0;var _center_lng=0; var _center_time=0; function loadGPS() { $.getJSON("/nj/iot/gps/tracert_realgps", function (data) { _center_lat = data.lat; _center_lng = data.lng; _center_time = data.record_time; //转换坐标为百度系 ggPoint = new BMap.Point(_center_lng, _center_lat); var arr = new Array(); var convertor = new BMap.Convertor(); arr.push(ggPoint); convertor.translate(arr, 1, 5, translateCallback); setTimeout("loadGPS()", 10000); }); } loadGPS();[/mw_shl_code] |
 创作达人
创作达人



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 还想请问一下楼主,传递数据的速度快吗? 你一共传了多少数据呢?
还想请问一下楼主,传递数据的速度快吗? 你一共传了多少数据呢?






