|
16199| 14
|
[项目] "漫游走悬崖"的机器人 |

|
【标题|名称】 “漫游走悬崖”的机器人 【项目介绍】“机器人需要感知周围世界的信息,否则就只能在原地发呆且看起来无比愚蠢。”当你花费几天几夜辛辛苦苦制作的机器人和小伙伴们玩得尽兴,TA却不知不觉中已走到台阶边,毫无判断能力,直接跌个底朝天!或者从高高的桌面上摔落到地板上变成一堆破铜乱铁。这时你自然会想到应该给TA点更强的功能吧,比如防跌落等等。 【实现功能】自主漫游,当TA到达台阶处或桌面边缘,检测到前进方向或左右边缘有“悬崖”时,主动避开,自我保护,继续漫步去咯!【附避障和局部防撞功能】 【展示】 【制作过程】 Step 1 参照DF商城的移动机器人组装硬件 https://wiki.dfrobot.com.cn/index.php/(SKU:ROB0118)3PA%E5%9F%BA%E7%A1%80%E5%A5%97%E4%BB%B6 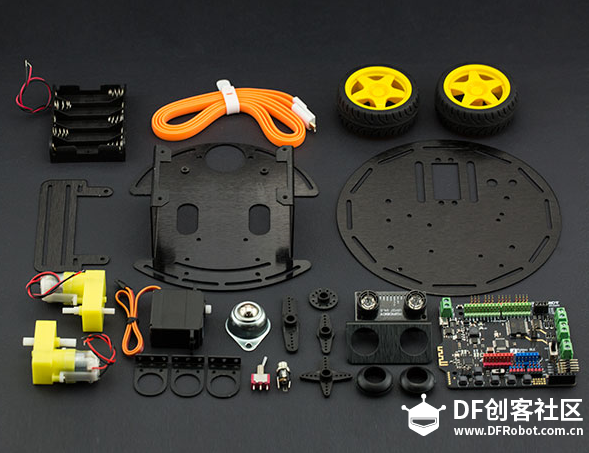 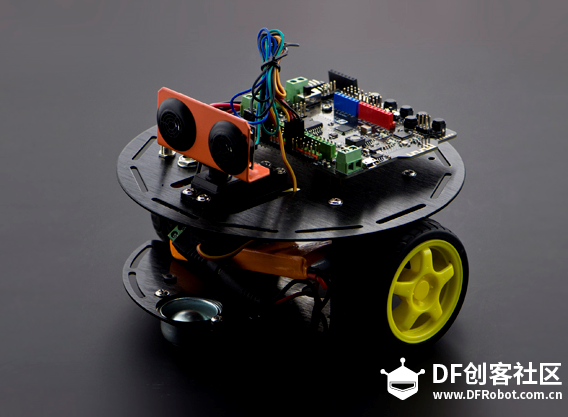 Step 2 加装三个防跌落传感器   人眼看不见的红外光通过手机镜头能看得清清楚楚!  (附带两个碰撞传感器用于局部防碰撞) 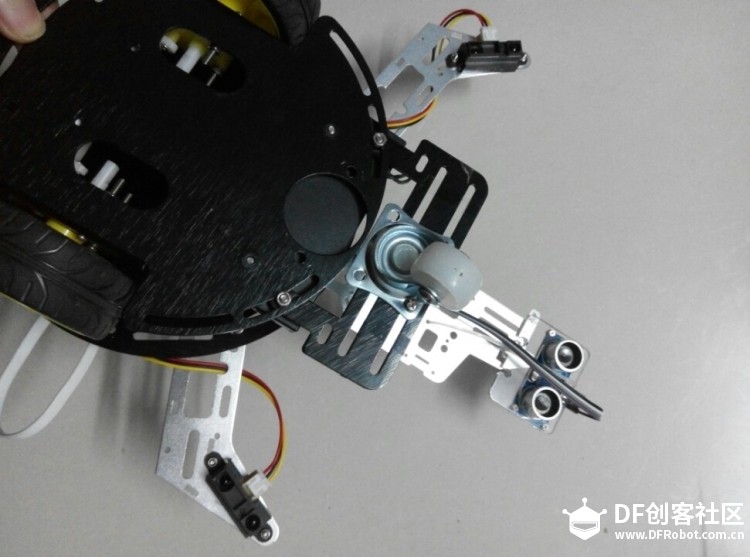 底面朝天(左右两个夏普红外测距传感器+前方超声波测距传感器,使用旧“直升机”上的超轻合金支架来固定。)  调整了支架偏向,这是最后形态,视频中是初始形态。上方舵机上橙色支架超声波模块用来避障,下方蓝色超声波用于前进方向防跌落,左右两旁加装碰撞传感器。 【代码】  DFROBOTAdd_5_SensorsOK.zip DFROBOTAdd_5_SensorsOK.zip |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 活跃会员
活跃会员






