|
37573| 26
|
[教程] 红外遥控——长毛甲虫!(教程已完成,欢迎批评!) |

 样子有点丑!  本作品功能:可通过红外遥控执行两个模式。 1、手动模式:能向前、后退、右转和跳动; 2、自动巡行模式就是随意行走遇到障碍就拐弯继续走。至于其他的功能就有待各位开发了。 前期要求: 本教程的实施条件,能动手焊接电子元件,能识别电路的连接方式,会用米思齐进行编程,动手能力要求稍高。 一、材料: NANO 328主控板X1 舵机X3, 红外遥控模块X1, SEN0001 超声波测距模块X1, 六脚开关X1, 充电模块X1, 3.7V300Mah的聚合物电池X2, 全彩共阴LED灯珠X2, 30mm铜柱X6, 导光纤维若干, 杜邦线若干, 热缩管若干, 螺丝若干, 甲虫切割板件一套。 工具:电烙铁、热熔枪、螺丝刀、剪刀等 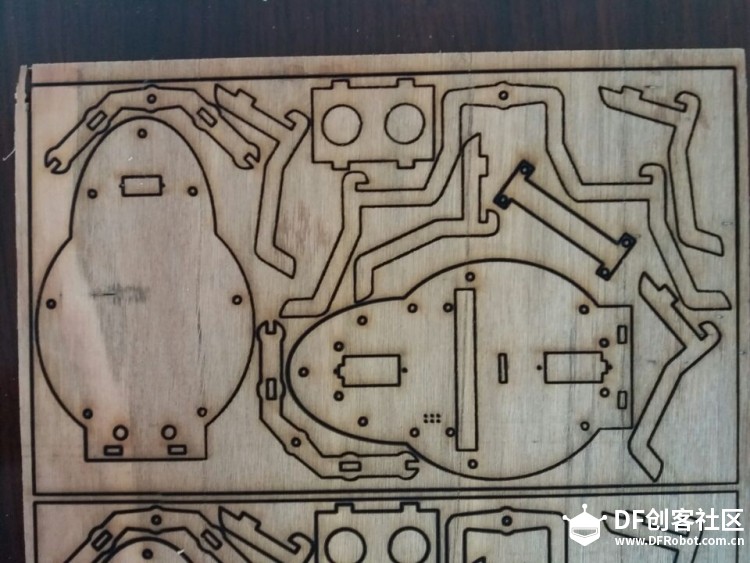 用市场上买的三合板切的,没椴木板漂亮。 二、前期加工: 1、电源开关部分接线:  材料状态。 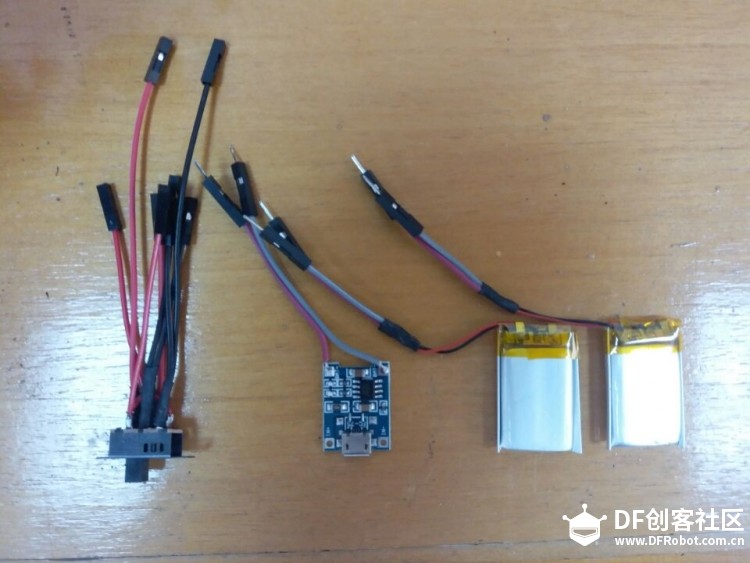 焊接完工状态。 2、杜邦线改造:因为去掉扩展板的原因,所以用改造杜邦线的方式增加控制板的供电插口。  线材原样,1分6的接法。  完工状态。 3、全彩LED灯珠的接线。 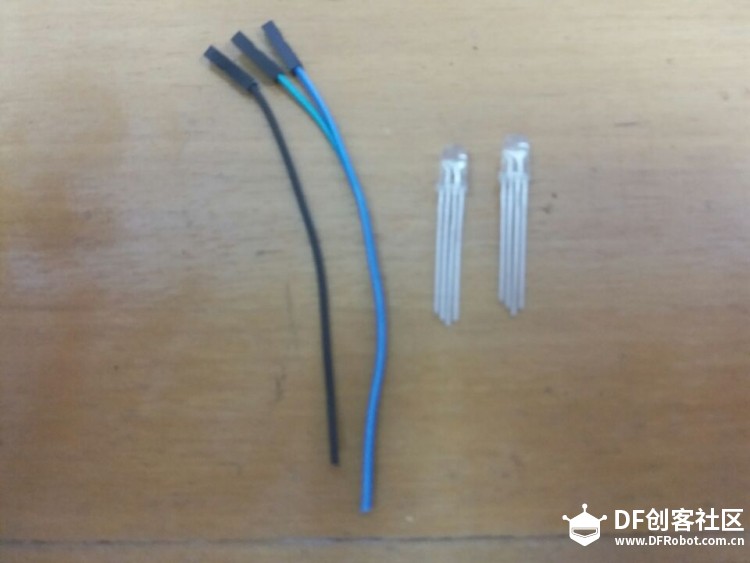 个人懒惰,只用了蓝灯和绿灯,所以只接三根线。  完成效果。 4、长毛的做法。  材料 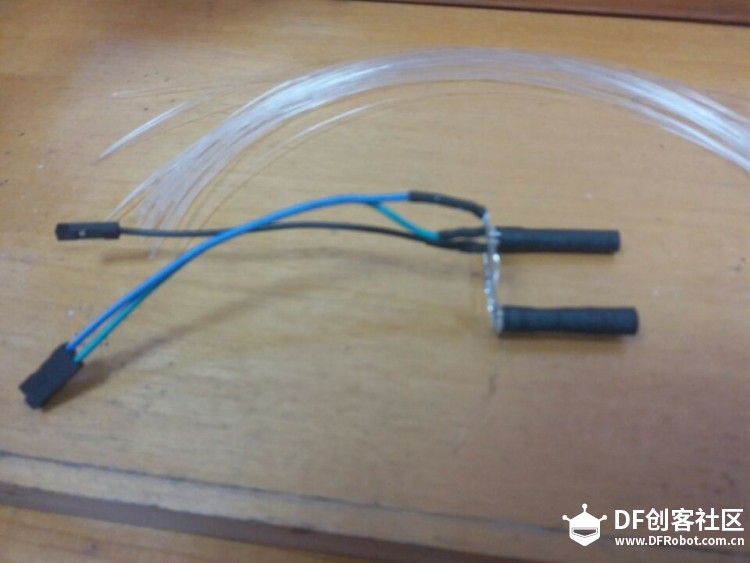 先把热缩管插到灯珠上。  再插上导光纤维,要注意毛的方向,再用电烙铁固定热缩管。 5、虫脚的加工。 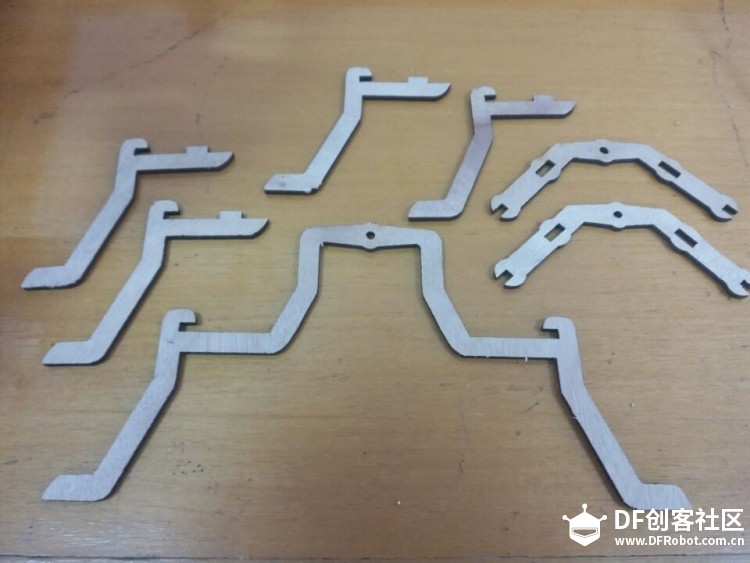 材料。  上螺丝。 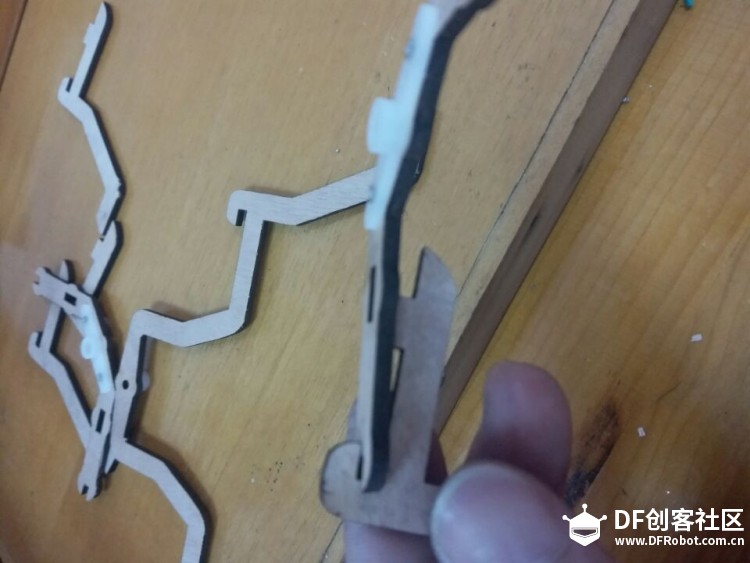 插接。  卡好状态。  完工后,用热熔胶加固。 6、红外遥控模块的加工。  其实就是把杜邦线套上热缩管,让线条好看点,硬点,让尾巴能竖起来! 7、前期加工完毕,整套材料效果如下:  三、组装连接: 1、电源部分,由于用到充电模块,充电时两块电池要在并联状态,而电池给主控板供电又要用到串联状态,再加上个人水平实在有限,所以这开关的连接花了我好长时间去思考,最终接法如下,如果各位有更好的方法请赐教! 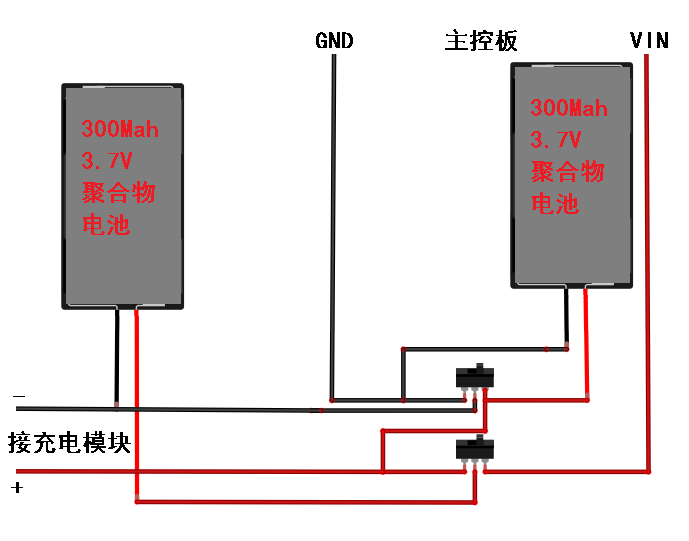 电源接线图。  实接效果图。 2、舵机安装:  底面效果。 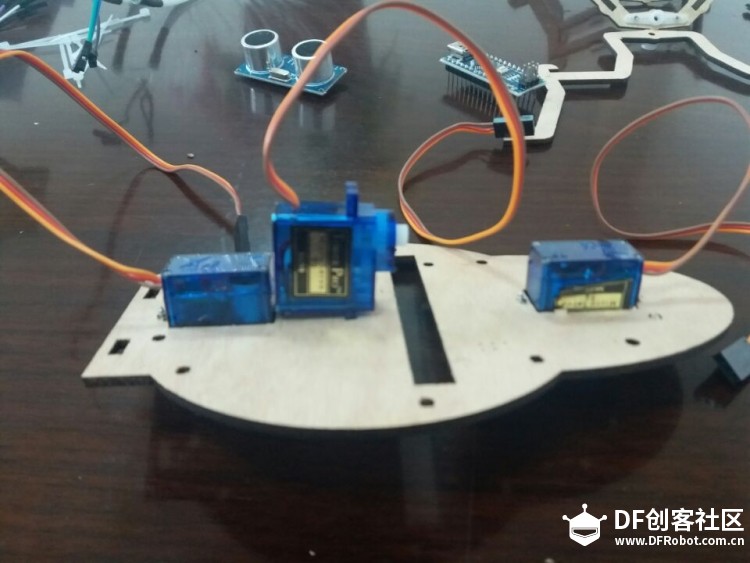 上面效果。 3、主控板安装:(底板铜柱已经拧上,这部就不做介绍了)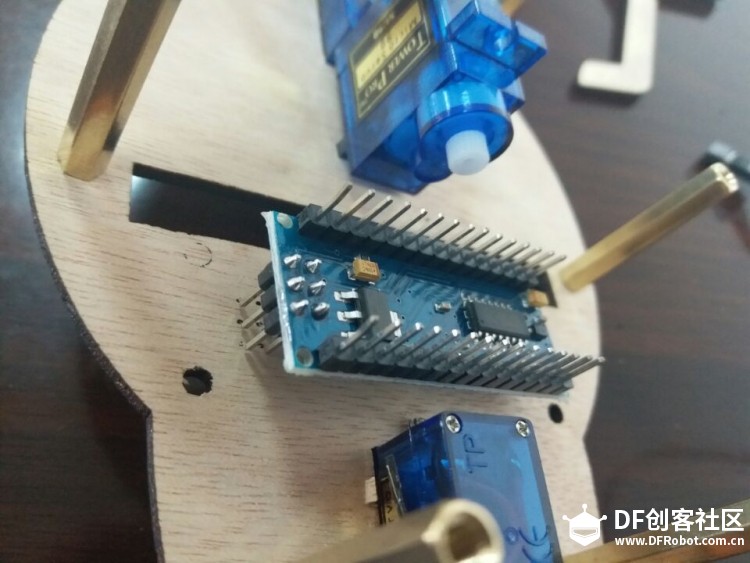 我利用主控板上的6针进行固定主控板,本来还想加上螺丝固定的,但后来觉得没必要就没加了。 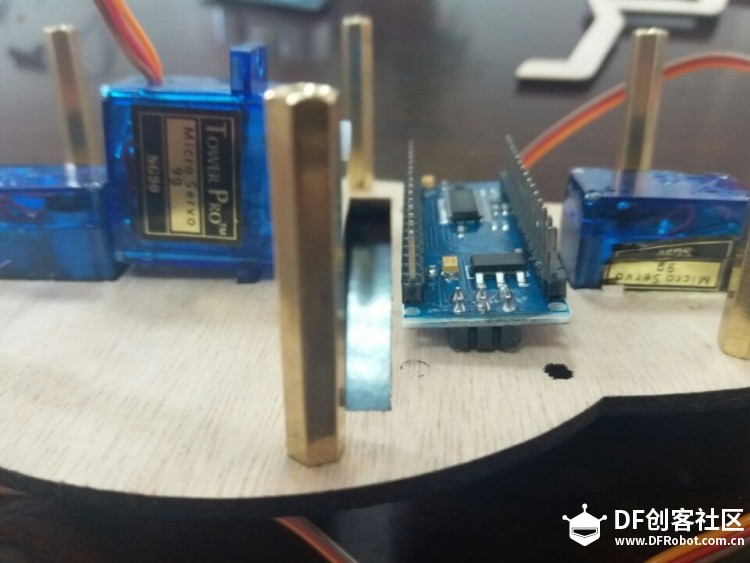 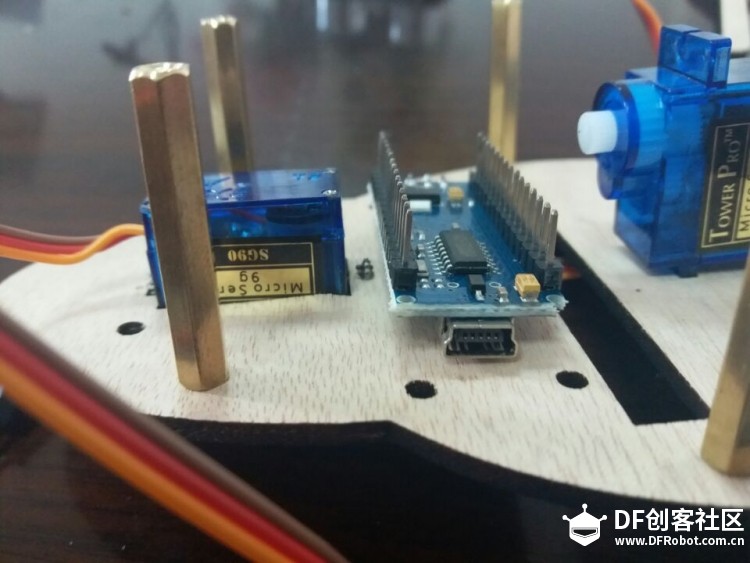 固定后的效果 4、各部件接线: 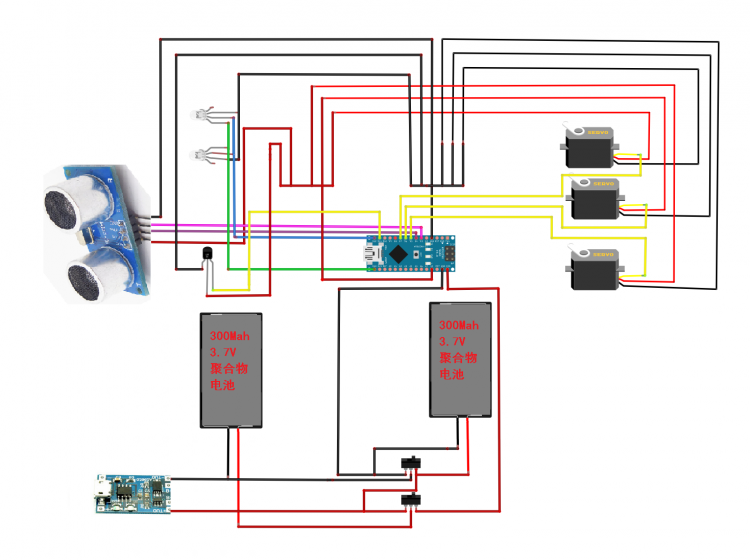 接线图 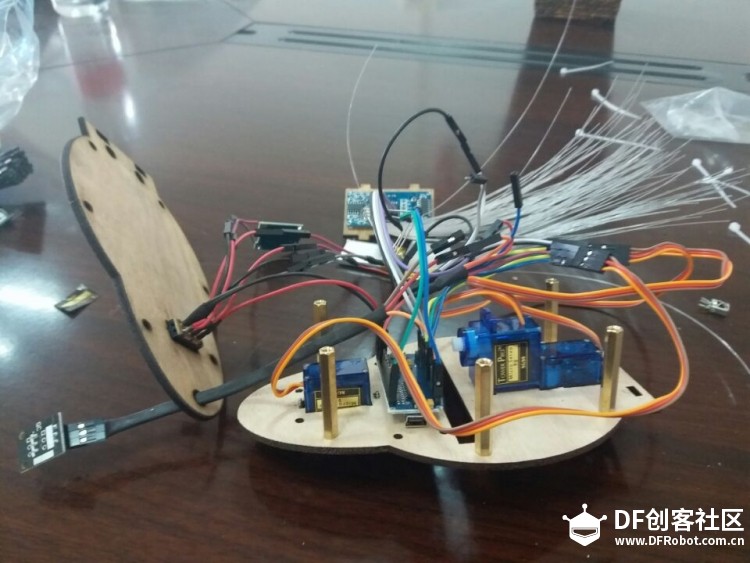 实接效果。 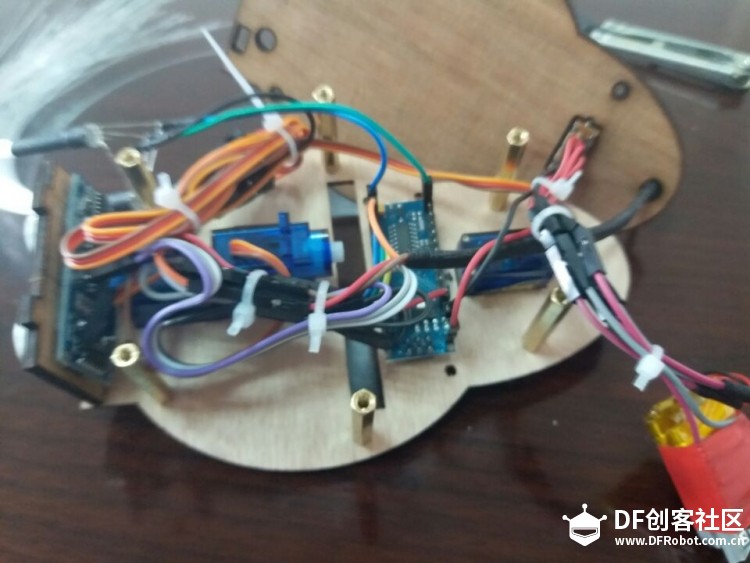 理线,电池和充电模块用电工胶布绑好。 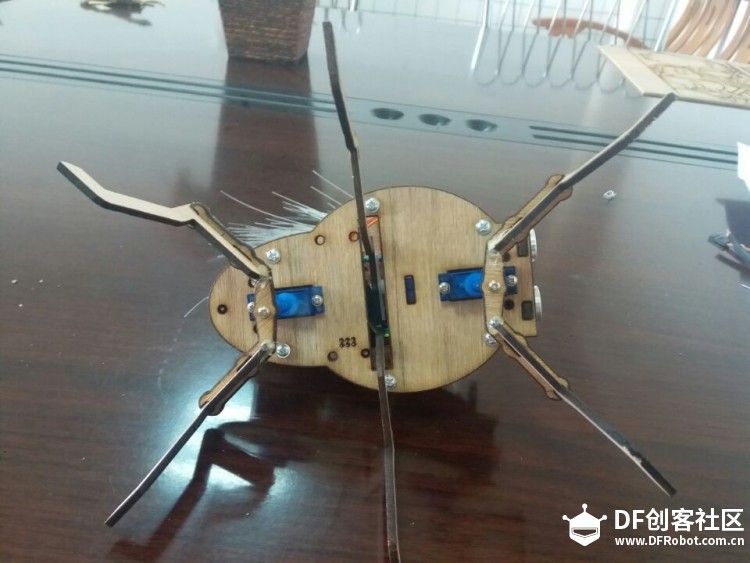 装上虫脚。 两束长毛从孔位穿上去灯珠直接就能固定在面板上了,固定电池在尾部位置,然后拧上几个螺丝就完工了。  插数据线的位置。 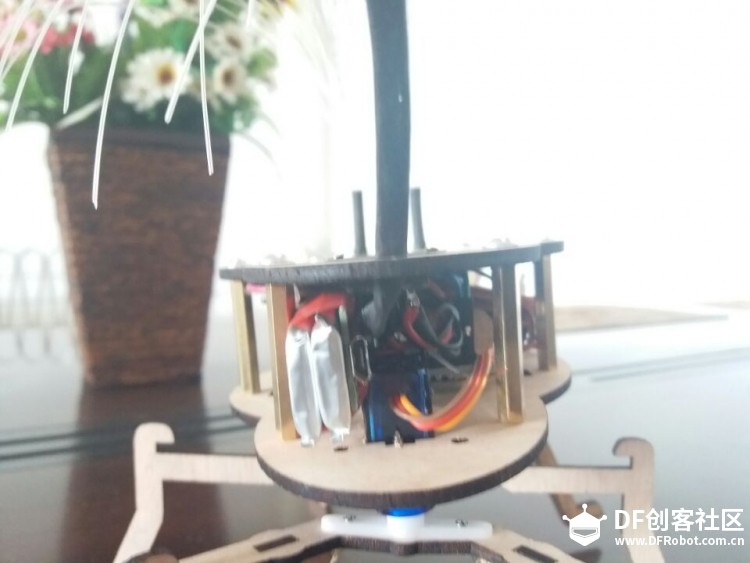 充电位置! 安装连接部分完工! 四、程序编写:(仅供参考) 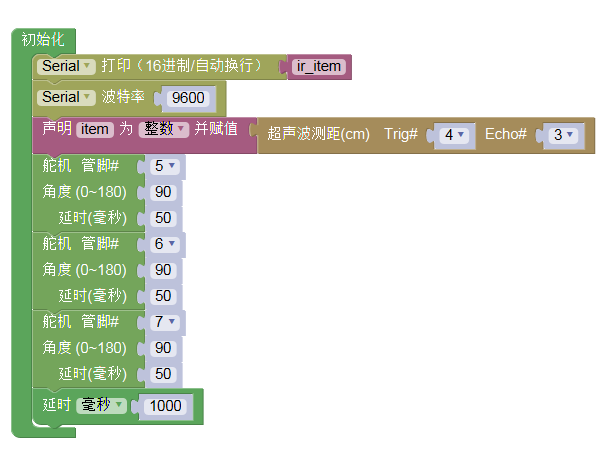 1、初始化。 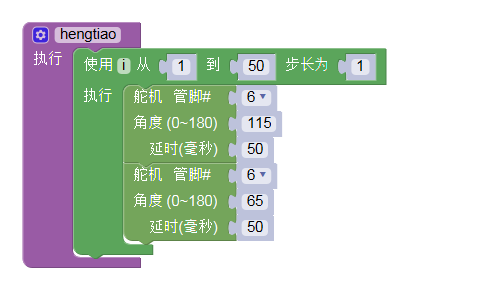 2、横跳函数模块。 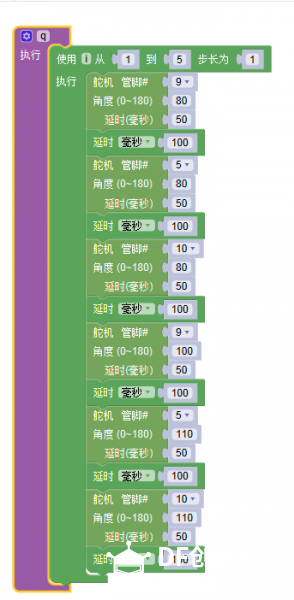 3、前走函数模块。  4、后退函数模块。  5、右转函数模块。 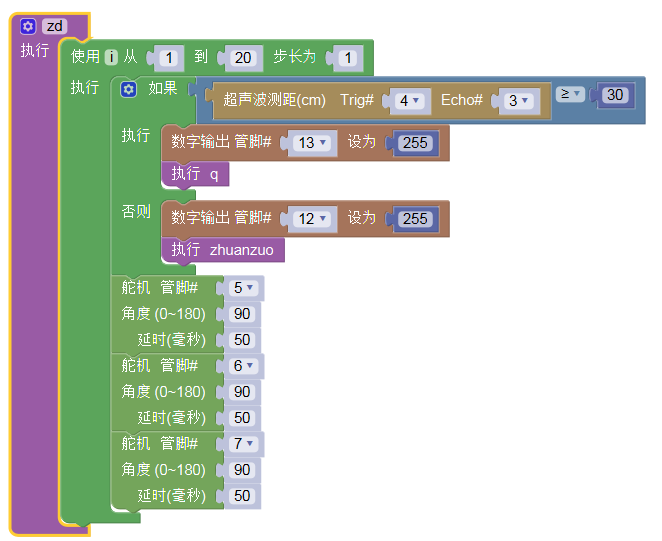 6、自动巡行模块。  7、主程序模块。 最后上个效果视频以上教程仅供参考!! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶