|
3766| 0
|
[黑科技] 机器人或许有个腿就够了, MIT发布视频用来嘲讽波士顿动力 |
 法律顾问:赵建英律师 麻省理工大学认为,机器人研究应该更注重实用化,机器人技术能得到快速发展在于其能用来解放和拯救生命。 Hermes,麻省理工大学研究人员开发的一款一种双足机器人,它可以模仿操作员的平衡,在跑步、行走和跳跃时保持直立。开发初衷是让ta能能从燃烧的建筑物、化学品泄漏或任何人类救援人员无法接近的灾难中营救遇难者。 研究人员定义认为这个双足机器人有朝一日可能是一项柔性化极强且适应性强的机器人模组。例如,更强力的救援机器人大块头可以下方都用上这个,然后双腿站起来推开重重障碍物,或者冲破一扇锁着的门,这或许比人形的机器人更给力。  视频源: Ramos and Kim, Sci. Robot. 4, eaav4282 (2019) 工程师们在四条腿机器人的设计以及它们的奔跑、跳跃甚至背部动作能力方面取得了长足的进步。但是让两条腿的仿人机器人在不摔倒的情况下对某物施加力或推动一直是一个重要的障碍。 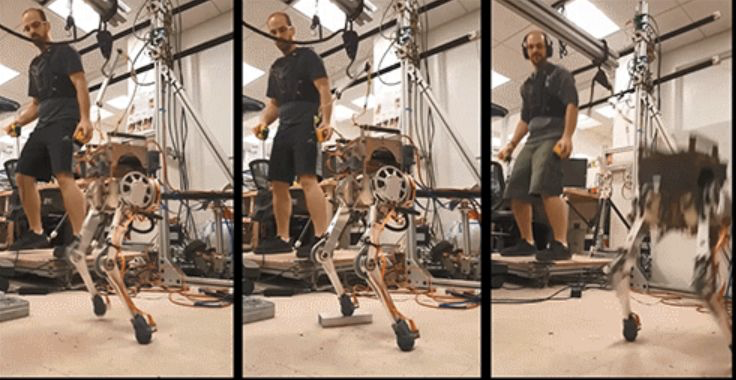 Joao Ramos遥控操作Hermes 图:Joao Ramos和Sangbae Kim 现在,麻省理工学院和伊利诺伊大学香槟分校的工程师们已经开发出一种在两腿遥控机器人中控制平衡的方法,这是使仿人机器人能够在具有挑战性的环境中执行高冲击力任务的重要一步。 这个团队制作的机器人,外形都酷似一个机械躯干和两条腿,由一个穿着背心的人类操作员远程控制,这个背心将人类的运动和地面反作用力的信息传送给机器人。通过背心,人类操作员既可以指挥机器人的运动,也可以感受机器人的运动。如果机器人开始翻倒,人类会感觉到背心上有一个相应的拉力,并且可以通过调整来重新平衡自己和机器人。在测试这种新的“平衡反馈”方法的机器人实验中,研究人员能够远程保持机器人跳跃时的平衡,并与人类操作者同步行走。  原地踏步遥操作视频 作为麻省理工学院博士后,joao ramos开发了这种方法,他说:“这就像背着一个沉重的背包跑步,你可以感觉到背包的动力是如何在你周围移动的,你可以适当地补偿。”现在,如果你想打开一扇沉重的门,人类可以命令机器人把身体扔到门前,推开门,而不会失去平衡。”Joao ramos现在是伊利诺伊大学香槟分校的助理教授,他在一项发表在《Science Robotics》上的研究中详细阐述了这一方法。这项研究的合著者是麻省理工学院机械工程副教授sangbae kim。 不仅仅是运动 此前,Kim和Joao ramos建造了两腿机器人Mechanisms (用于高效的机器人机构和机电系统),并开发了通过远程操作模拟操作者动作的方法,研究人员说,这种方法具有一定的人文优势。Joao ramos说:“因为你有一个可以在飞行中学习和适应的人,机器人可以执行以前从未练习过的动作(通过遥控操作)。” 在实例中,赫尔墨斯把咖啡倒进杯子,用斧头砍木头,用灭火器灭火。所有这些任务都涉及到机器人的上身和算法,以使机器人的肢体定位与操作者的肢体定位相匹配。赫尔墨斯能够进行高冲击运动,因为机器人是植根于原地的。在这些情况下,保持平衡要简单得多。然而,如果机器人被要求采取任何步骤,它很可能在试图模仿操作者的动作时翻倒。 “我们意识到,为了产生强大的力量或移动重物,仅仅模仿动作是不够的,因为机器人很容易坠落,”金说。我们需要复制操作员的动态平衡。”  连续跳跃遥操作视频 进入小爱马仕,这是一种爱马仕的微型版本,它大约是第三个成年人的大小,团队将机器人简单地设计为一个扭矩和两个腿,并专门设计系统以测试下体任务,如机车和秤。作为一个完整的身体对抗部分,小爱马仕是为远程操作而设计的,一个操作员在一件控制机器人动作的夹克中下落。 对于机器人复制操作员的平衡比他们的动议更大,团队必须首先找到一种简单的方式来表示平衡。Joao ramos意识到,平衡可以从两个主要成分中分离出来:一个人的“质量中心”和他们的压力-基本中心,一个点在地面上,在地面上,一种力量等同于所有支持力量的力量都被锻炼。 在与压力中心有关的质量中心的位置,Joao ramos发现,直接关系到一个人在任何时候的平衡。他还认为,这两种成分的位置可以作为一个倒置的吊坠的物理代表。想象一下,在同一个地方坐着的时候,从一边到另一边。该效应类似于垂直上下垂直的滑动,顶端代表了一个“质量中心”(通常在扭转中)和底部代表其地面压力中心。 重型起重 为了确定重心与压力中心的关系,拉莫斯收集了人体运动数据,包括在实验室里的测量数据,在那里他来回摆动,走到位,跳上测力板,测量他在地面上施加的力,同时记录了他的脚和躯干的位置。然后,他将这些数据压缩成质量中心和压力中心的测量值,并建立了一个模型,将它们相互关系表示为一个倒立摆。 然后,他开发了第二个模型,类似于人体平衡模型,但缩放到更小、更轻的机器人的尺寸,他还开发了一个控制算法,将两个模型连接起来并实现反馈。 研究人员测试了这个平衡反馈模型,首先是在实验室里建立的一个简单的倒立摆上,它是一个和小爱马仕差不多高的横梁。他们把光束连接到远程操作系统上,然后光束在轨道上来回摆动,以响应操作者的动作。当操作员向一侧摇晃时,横梁也会这样做——操作员也可以通过背心感觉到这种移动。如果光束摆动过大,操作者感觉到拉力,可以用另一种方式倾斜来补偿,并保持光束平衡。 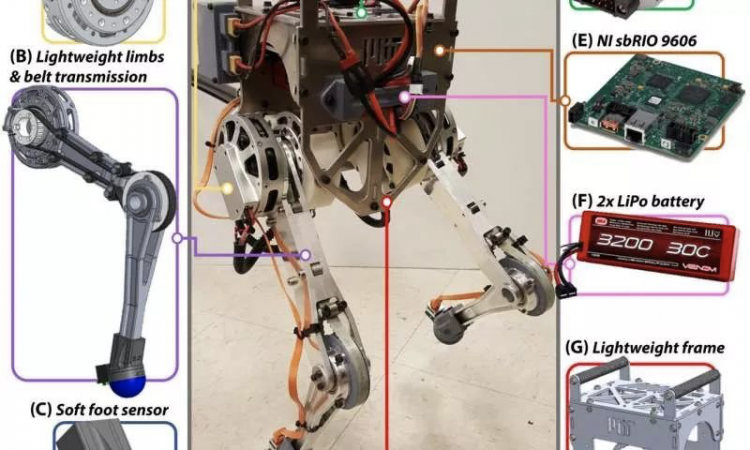 两足机器人小爱马仕 实验表明,新的反馈模型可以维持梁上的平衡,因此研究人员随后在小爱马仕身上试用了该模型。他们还为机器人开发了一种算法,将简单的平衡模型自动转换为每只脚必须产生的力,以复制操作者的脚。 在实验室里,Joao ramos发现,当他穿上背心时,他不仅可以控制机器人的运动和平衡,而且还能感觉到机器人的运动。当机器人被来自不同方向的锤子击中时,拉莫斯感到背心朝着机器人移动的方向猛拉。Joao ramos本能地抵制了拖拽,机器人发现拖拽是重心相对于压力中心的微妙移动,然后它模仿了这个移动。结果是机器人能够避免翻倒,即使是在身体不断受到打击的情况下。 小爱马仕在其他运动中也模仿Joao ramos,包括跑跳到位,在不平的地面上行走,所有这些动作都是在没有绳索或支撑的情况下保持平衡。“平衡反馈很难定义,因为这是我们不假思索的事情,”Kim说。这是第一次为动态动作正确定义平衡反馈。这将改变我们控制遥控仿人机器人的方式。” 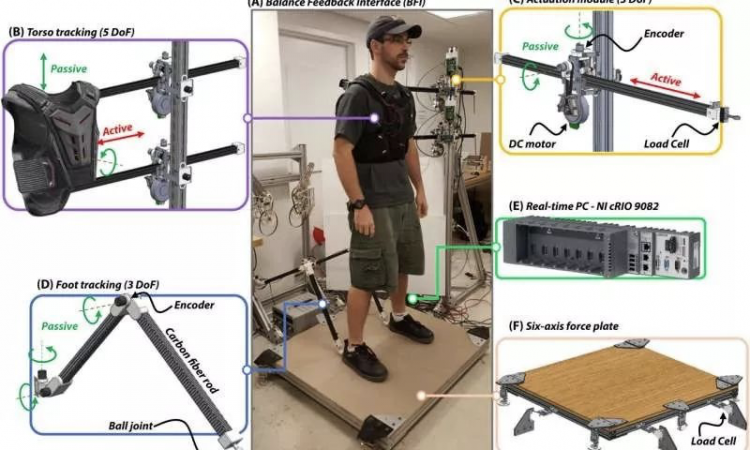 操作人员的远程操作界面 Kim和Joao ramos将继续致力于研发一种具有类似平衡控制的全身人形机器人,直到有一天能够在灾区驰骋,并在救援或救助任务中奋起推开障碍物。Kim说:“现在我们可以通过适当的平衡交流,打开沉重的门,举起或投掷重物。”这或许比单纯的制造一个人形机器人来的更加便宜和让人安心。 End 来源:中国机器人网、Massachusetts Institute of Technology 转自:直观学机械 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






