|
5258| 2
|
[教程] M.A.R.K|排雷巡检车 |
|
本帖最后由 汤果 于 2020-6-28 07:32 编辑 项目介绍 我们用 M.A.R.K 来做一辆排雷巡检车。小车沿着既定的路线行驶(地图上的黑线),当检测到炸弹时停止运行,车头灯亮红色并闪烁若干次。  思路分析 这个项目分为两个部分:沿着地图巡线和检测识别炸弹。因为 M.A.R.K 板载 RAM 限制,无法同时运行多个人工神经网络模型。也就是说我们不能完全依靠摄像头视觉传感器来执行巡线和物体检测功能。其实两个功能合用也不太现实。视觉巡线需要将摄像头朝着地面,检测地图上的线条,而物体检测需要摄像头朝前看,观察周围的物体。因此这两部分我们这样设计:巡线功能利用小车底盘上的巡线传感器,炸弹识别利用摄像头视觉传感器。 程序实现 程序启动后循环检测前方是否有炸弹。如果检测到炸弹则停止小车,闪烁车灯。否则执行地图巡线。地图巡线部分用的是巡线传感器,可以参考《M.A.R.K|用巡线传感器实现小车巡线》。物体检测用到了“模型预测”分类下的<普通物体 识别结果为(人)概率>(50)%>这个积木块。这个语句用来检测摄像头视野范围内是否有某个物体,以及是该物体的概率。  最终的程序如下所示: 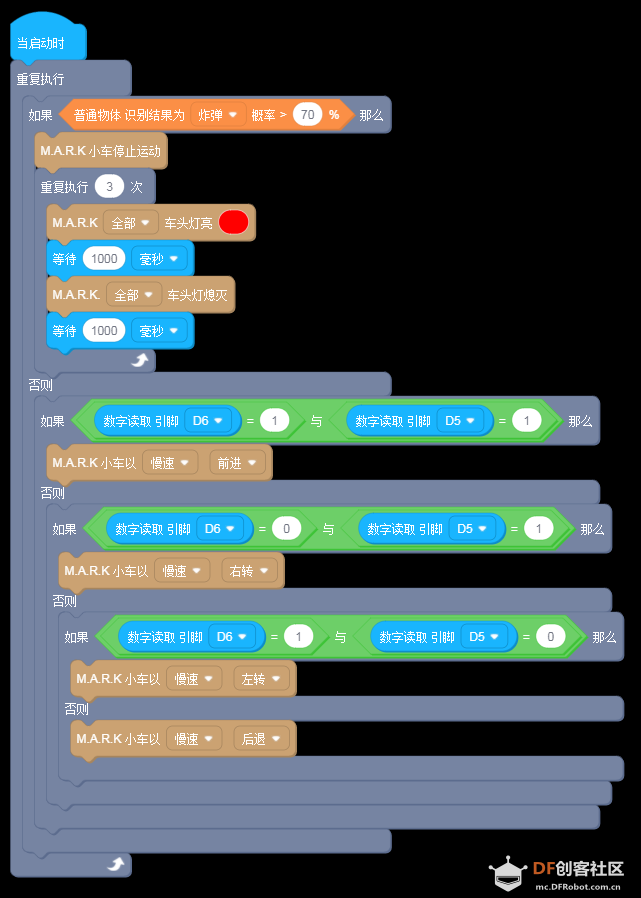 我们可以看到,代码还是挺简洁的。前半部分检测物体,识别到炸弹就停车,闪车灯。后半部分巡线。 温馨提示:如果实现效果不佳,可以修改识别结果的概率。例如我房间里的窗帘就有一定几率被识别成炸弹(可能颜色接近),所以我就提高了识别概率。当然光线也要明亮适宜。 效果演示 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY






