|
5878| 1
|
[麦昆 V4.0] 遥控麦昆 |
任务说明设计程序,实现游戏手柄或红外遥控器控制麦昆运动。 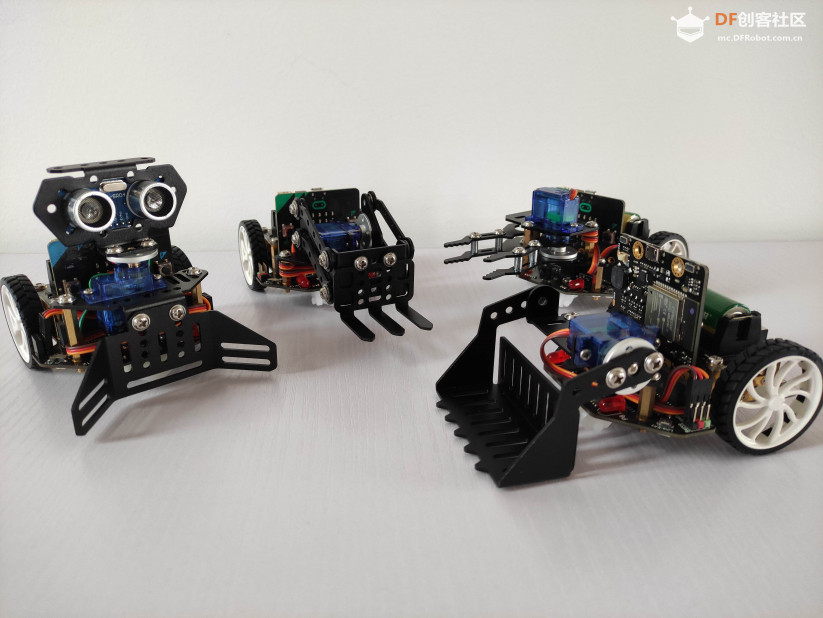 可选成员:
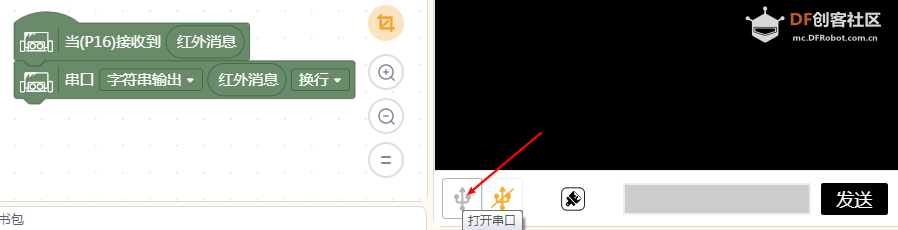
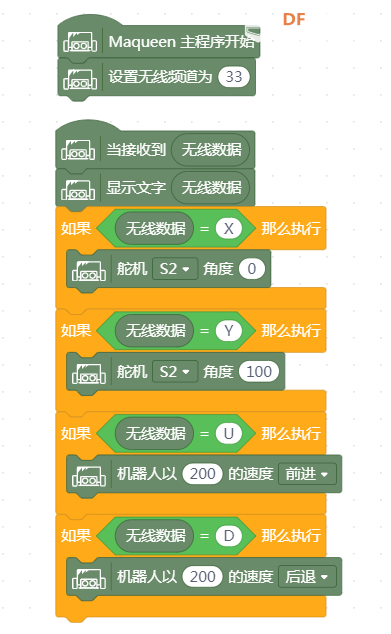
思路分析麦昆可以做很多运动,比如前进、后退、打开夹子、翻车斗等。一般情况下,我们在程序中让麦昆先后执行特定的动作,并不受我们控制。如果要实现遥控功能,我们需要用到红外遥控器或者游戏手柄。 遥控选型方案一:红外遥控器麦昆车头有红外接收模块,可以接收红外遥控器发送的信息。对接收到的红外信息解码后可以执行不同的动作。  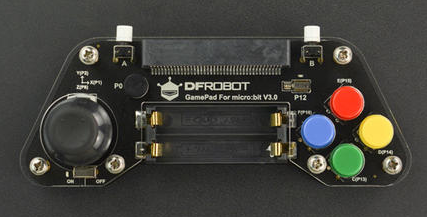
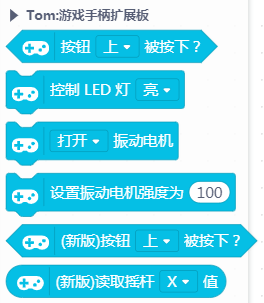
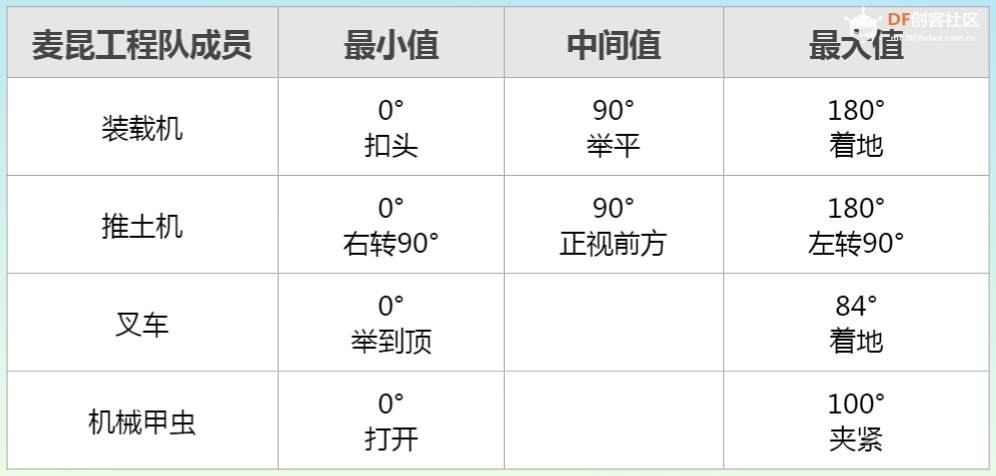
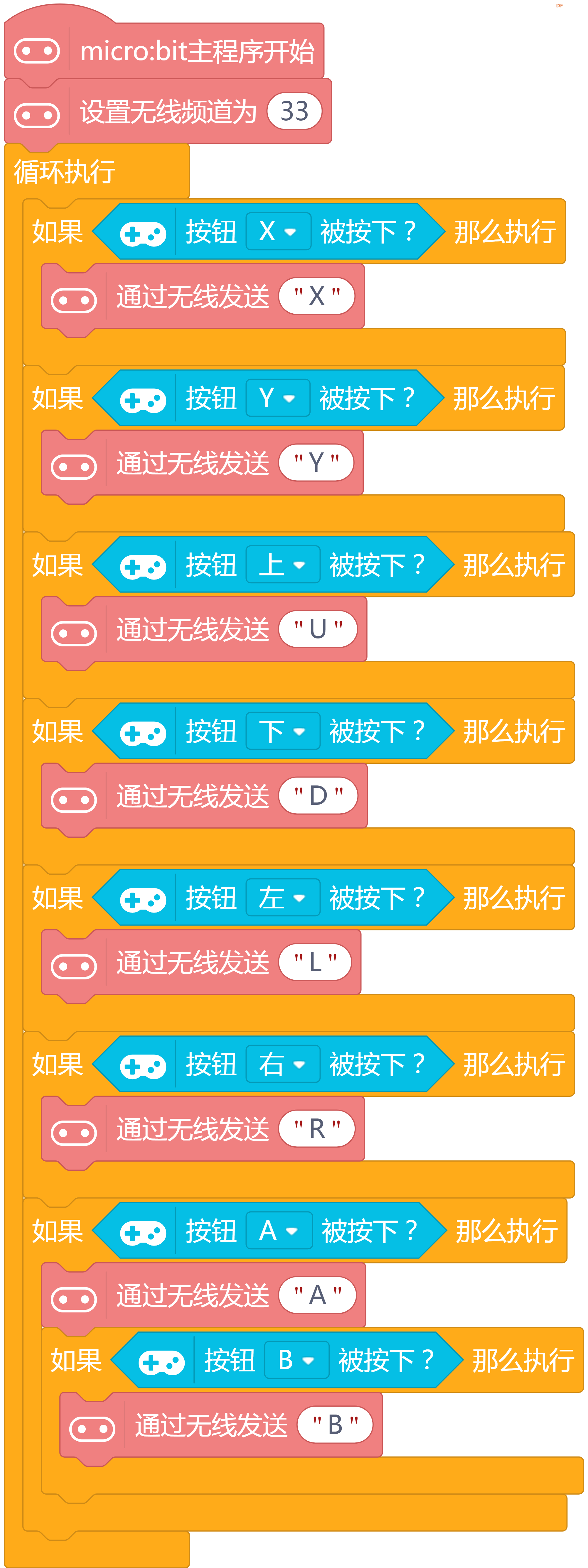
要点提示如何读取遥控器的红外编码?编写测试程序,通过串口观察并记录相应按钮的红外编码。 游戏手柄怎么用?可以直接读取不同按钮对应引脚的数据,也可以使用汤老师编写的用户库。 摇杆怎么用?同样编写测试程序,通过串口观察摇杆临界值(最上方、最下方、最左方、最右方),了解摇杆的控制范围。 舵机角度是否有限制?麦昆工程队采用的是 180 舵机,范围是 0 到 180。但不同工种由于结构和安装角度不同,存在不同的限制。以老师提供的这套麦昆工程队为例,具体角度范围如下: 操作指南1.选择合适的小车; 成果展示装载机+红外遥控
推土机+红外遥控
叉车+游戏手柄
机械甲虫+游戏手柄
提示:游戏手柄也可以使用掌控板的无线广播功能! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed








 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY






