|
4139| 2
|
[知识点] 基于人脸检测的喊话机器人 |
|
本帖最后由 qmqm 于 2021-4-7 16:14 编辑 1. 概述 通过语音录制功能进行声音录制,保存到内存卡再根据人脸识别功能,当检测到人脸时,调取刚才存储的语音进行播放。  硬件及耗材
软件及服务
制作工具
为了配合小区的疫情宣传工作,我打算制作一个转动镜头巡视且识别到人脸后播放预先录制好的音频的机器人,同时还会挥手吸引人们注意。 4. 制作步骤步骤一:功能分析首先分析下喊话机器人应该有的功能,以及可以怎样实现对应功能。 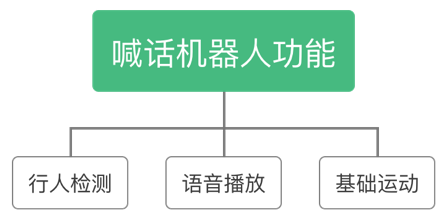 左右舵机分别接在S1和S2接口(注意颜色线序);电机接在M1接口;KOI接在Armourbit的Port2(需要电池盒供电)。 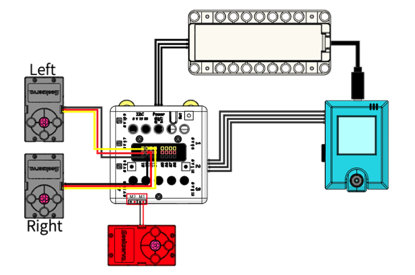 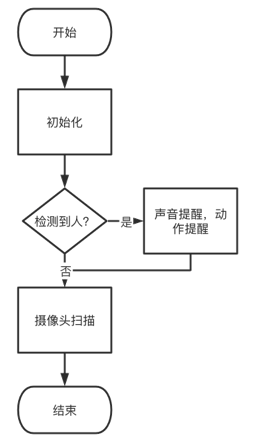 步骤四:程序展示初始化) 步骤四:程序展示初始化)通过人脸识别来判断是否有人经过,以变量state记录结果,state为0则代表没人,state为1则代表有人。  录音程序和检测程序,编写完成后,上传,按下A录下想要说的话 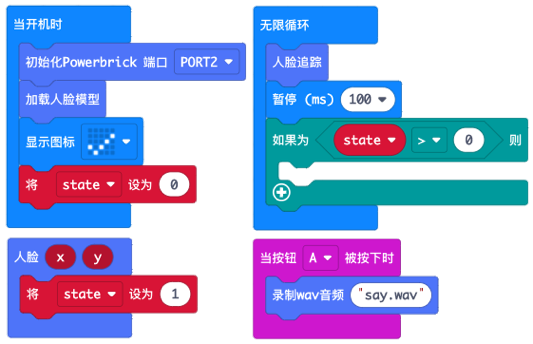 有人时播放提醒的声音并控制舵机做出动作,引起人们的注意 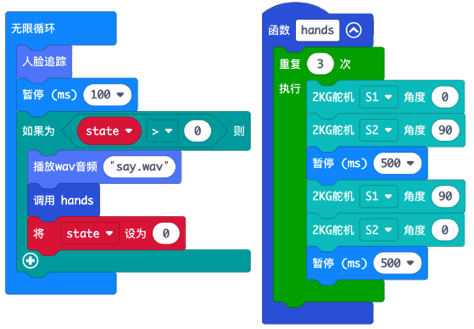 通过电机控制机器人摄像头左右转动,因为连接线的限制,转动角度的范围在-30°到30°,具体对应的电机转速和转动时间需要后面实际实验测试得到  根据图纸进行组装,或根据自己想法做相应设计调整。 第14课 机器人喊话 组装图.pdf5. 后记 除了使用人脸追踪,我们还可以试一试使用特征分类进行检测。 注:文章转载与kzone喵星球,未经作者许可,任何人不得摘编、转载文章。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






