|
158964| 0
|
[项目] Touch Cam - 树莓派相机 |

|
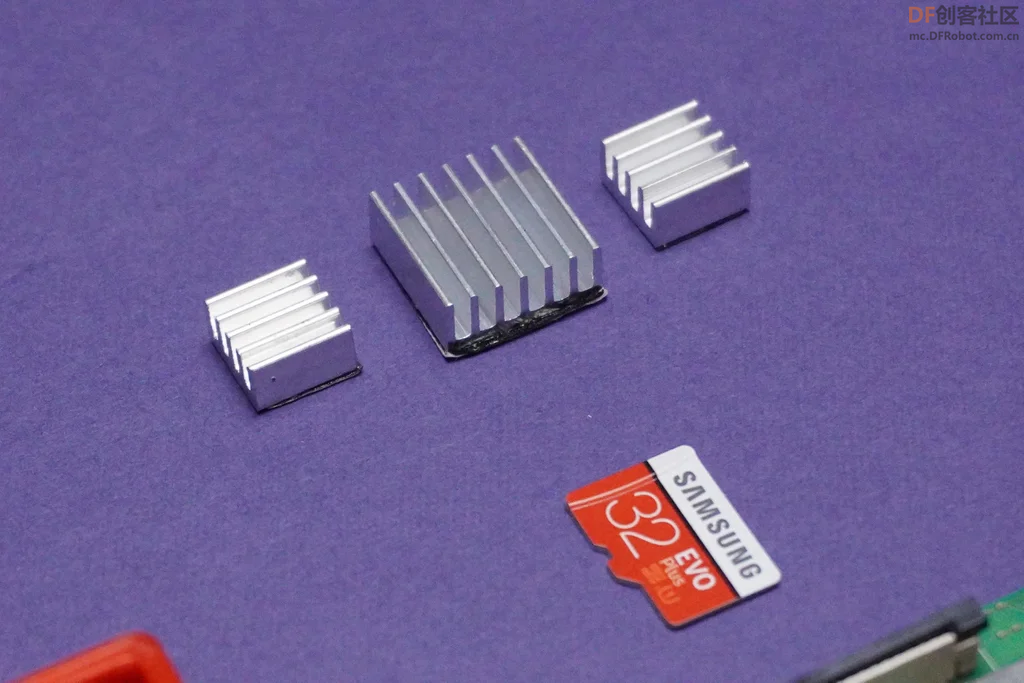
本帖最后由 -YAYA- 于 2023-8-28 15:59 编辑 Touch Cam - 树莓派相机  【项目简介】 Touch Cam是对Pi Cam进行了重新设计和增强的版本,它是一个树莓派桌面相机服务器,集成了触摸显示屏和触摸传感器,为用户提供直观和交互式的使用体验。该项目将树莓派的强大功能,与自定义的CAD再设计和创新的触摸界面相结合,使用户能够更加方便地捕捉照片、视频和延时序列。 【主要功能】 1.触摸显示屏:Touch Cam采用高分辨率触摸显示屏,为相机控制、图像预览和视频播放提供视觉界面。使用触摸显示屏,用户可以轻松浏览菜单,并查看实时图像和视频。 2.触摸传感器:设计中加入了触摸传感器,实现了拍摄照片和启动延时序列的无缝操作。只要轻轻点击触摸传感器,用户就可以启动相机功能,无论是拍摄一张照片还是启动延时序列。 3.树莓派桌面相机服务器:该项目充分发挥了树莓派的计算能力,将其用作多功能相机服务器。Touch Cam提供了一个基于网络的界面,可以从连接到相同网络的任何设备上访问,使用户能够远程控制和访问相机的功能,包括捕捉照片、录制视频和创建延时序列。 4.冷却系统:Touch Cam配备了5V冷却风扇和散热器,以确保有效的温度调节。冷却系统可防止树莓派在长时间使用过程中过热,即使在要求苛刻的情况下也能维持稳定。 5.自定义CAD再设计:自定义CAD的再设计不仅增强了功能,还使用了时尚实用的设计,将触摸显示屏、触摸传感器、冷却风扇、散热器、Raspberry Pi HQ相机模块和Raspberrry Pi容纳在一个紧凑的相机外壳中。 6.简单的设置和配置:设置触摸摄像头非常简单,只需要最基本的专业知识。通过清晰的文档和分步说明,用户可以快速组装硬件组件,安装必要的软,然后开始拍摄令人惊叹的照片,创建延时序列。 在本教程中,我将为Touch Cam项目提供使用Fusion 360的设计过程的详细解释。Fusion 360是一款功能强大的CAD(计算机辅助设计)软件,帮助用户创建复杂的3D模型和设计。跟着这些步骤,你将能够充分发挥Fusion 360的潜力来设计和可视化自己的项目。 注意:你可以进一步自定义和扩展项目描述。 【硬件清单】 组件:
工具:
  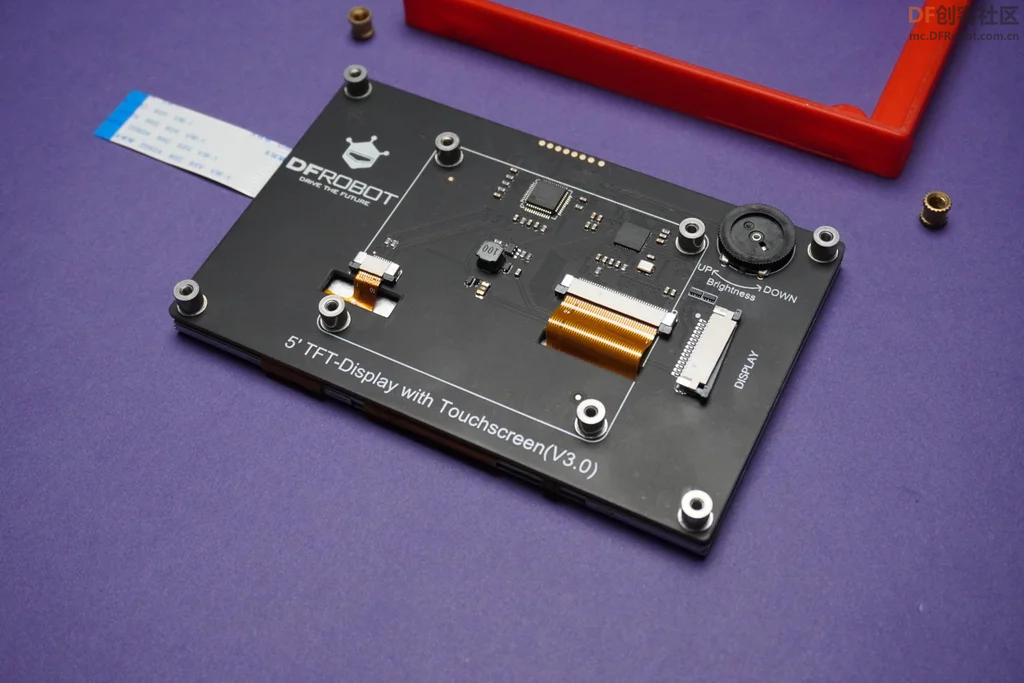 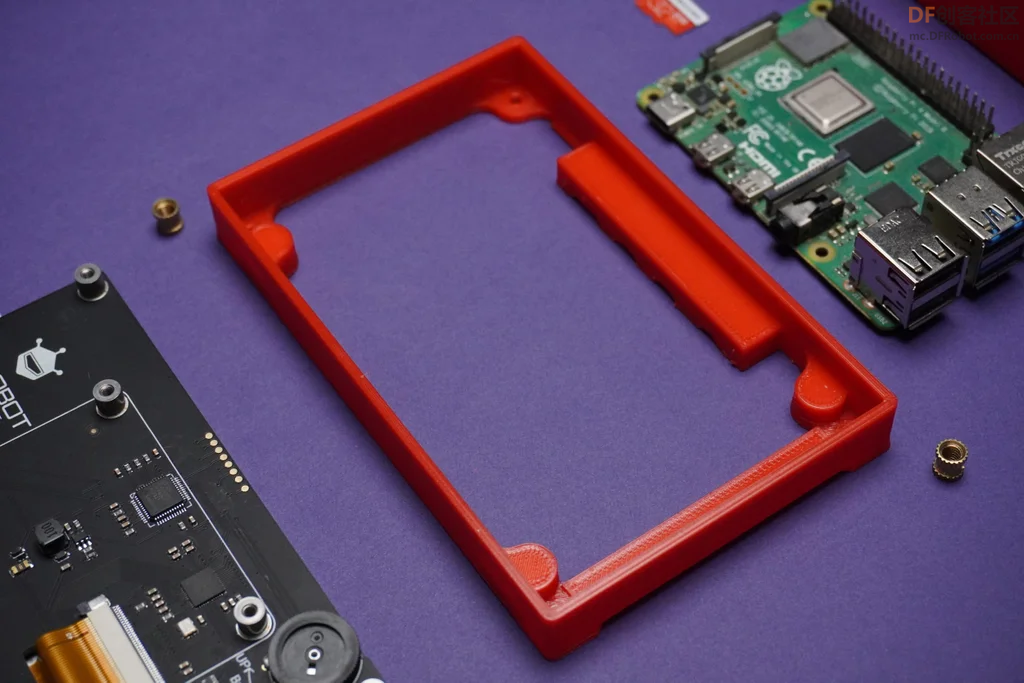 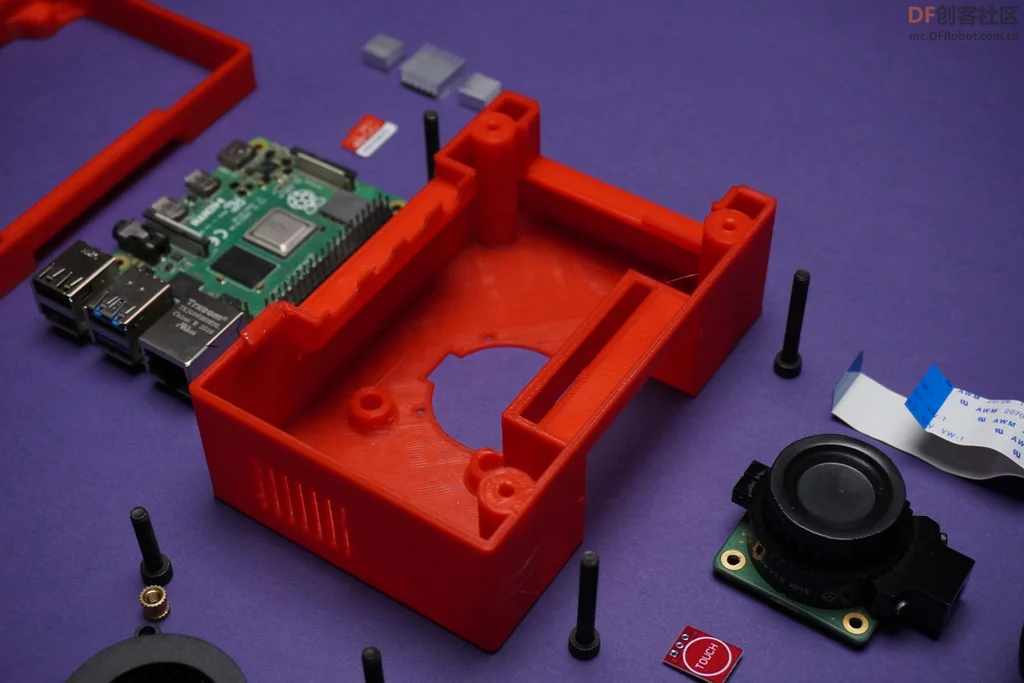 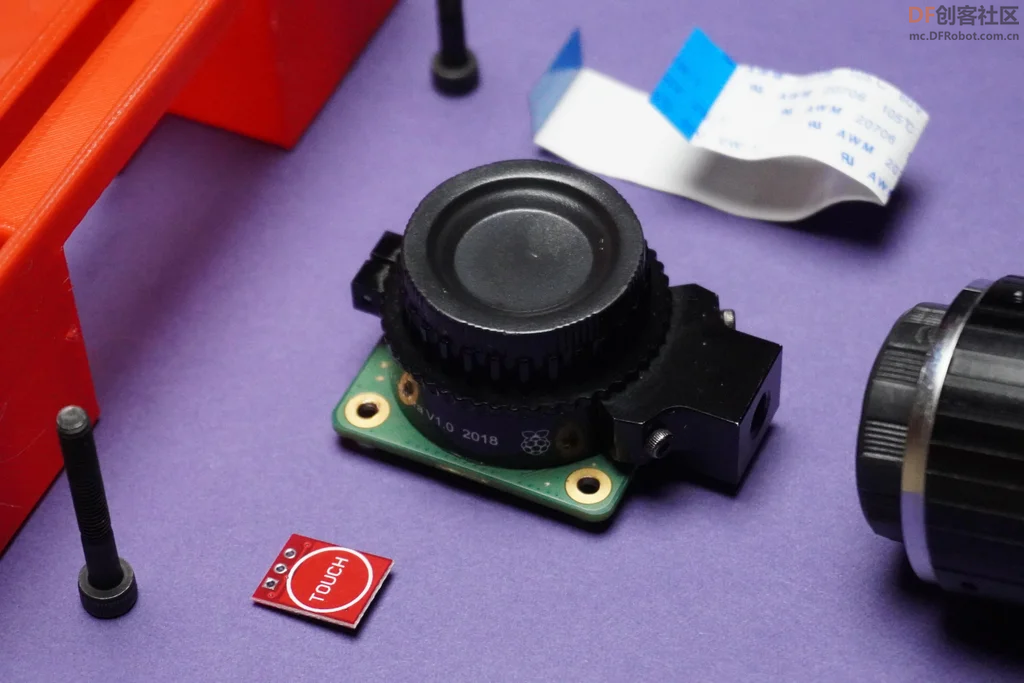  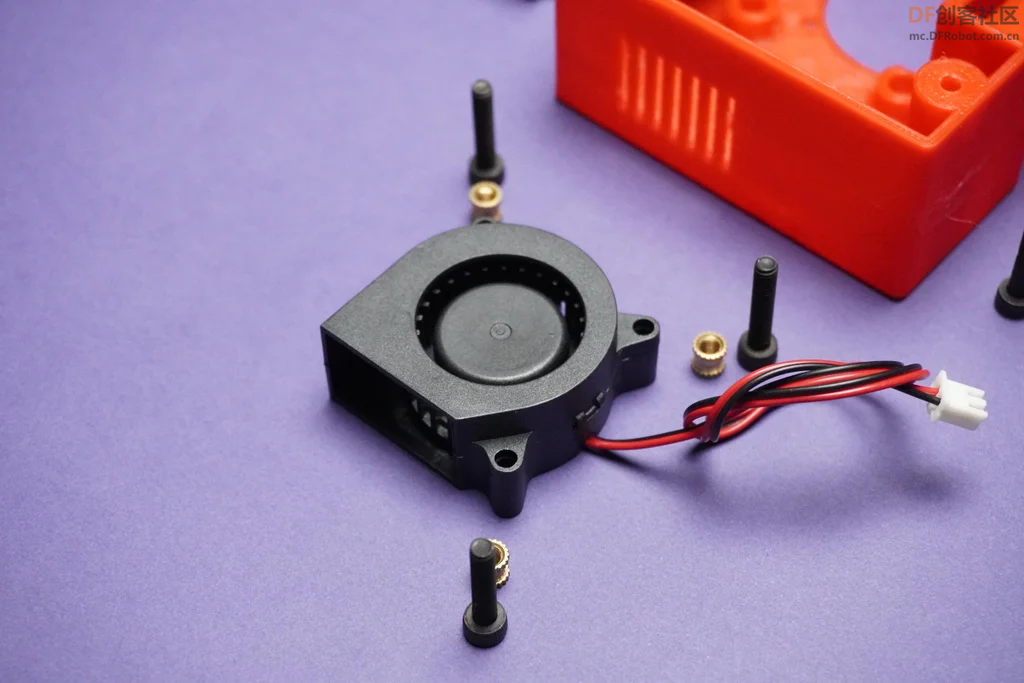    【步骤】 步骤1:3D打印 *下载以下stl文件并进行3D打印 1.前面板.stl 2.基础面板.stl 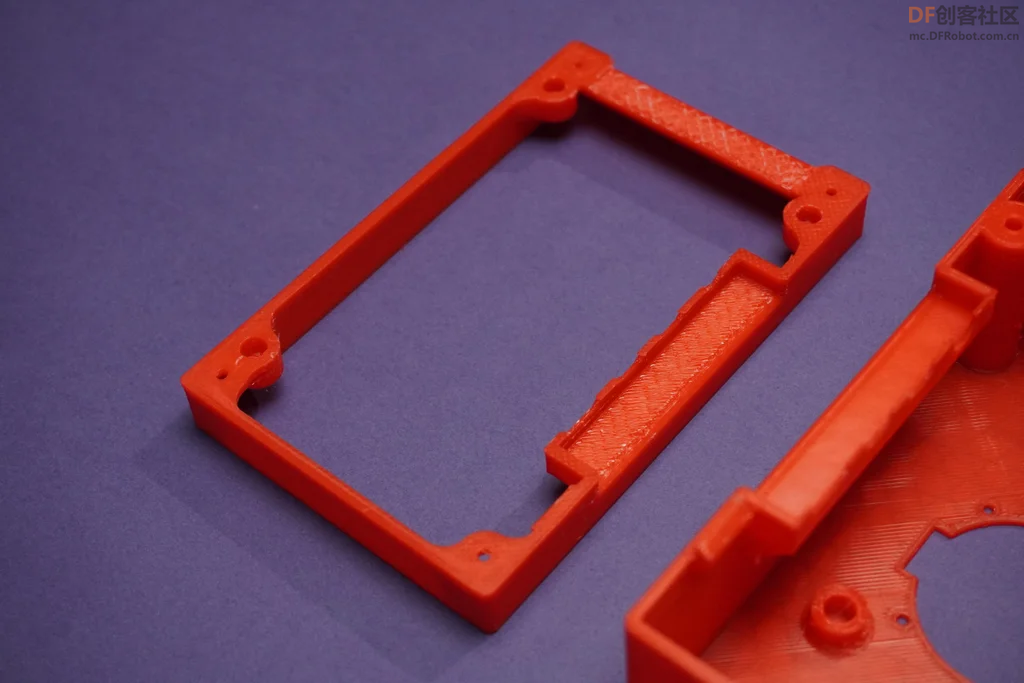 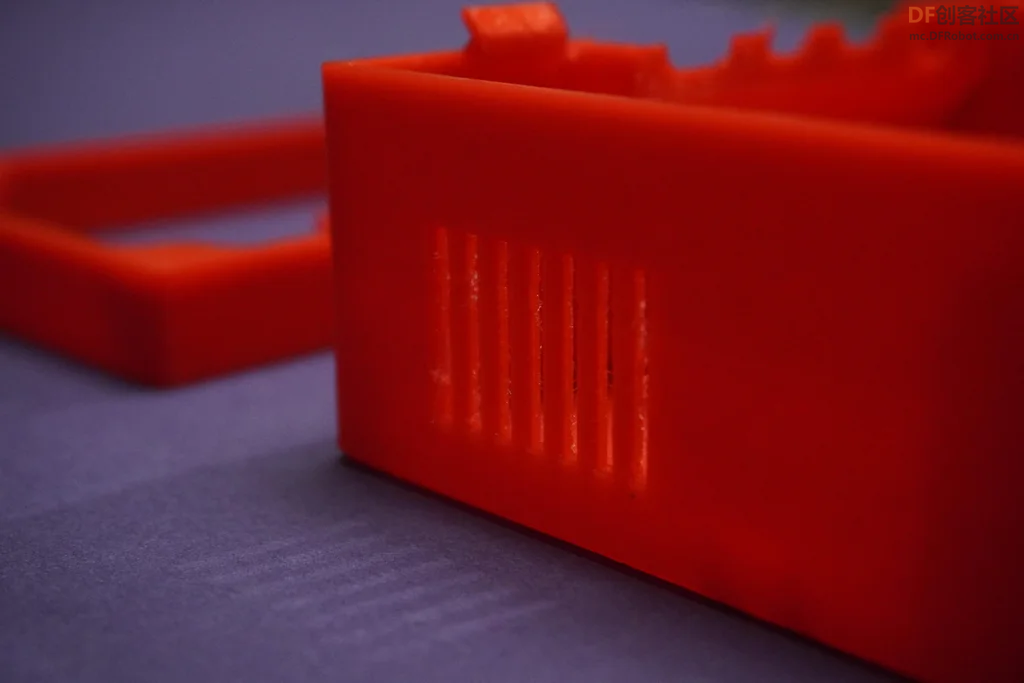 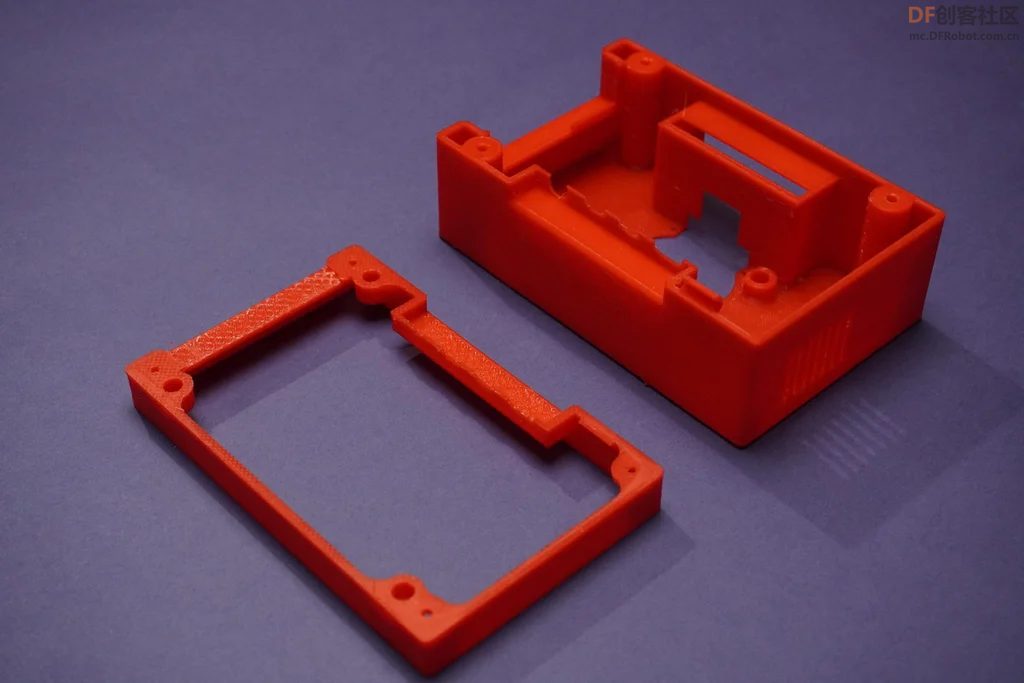 步骤2:组装第1部分 *用M2.5螺钉将显示屏放入前面板。 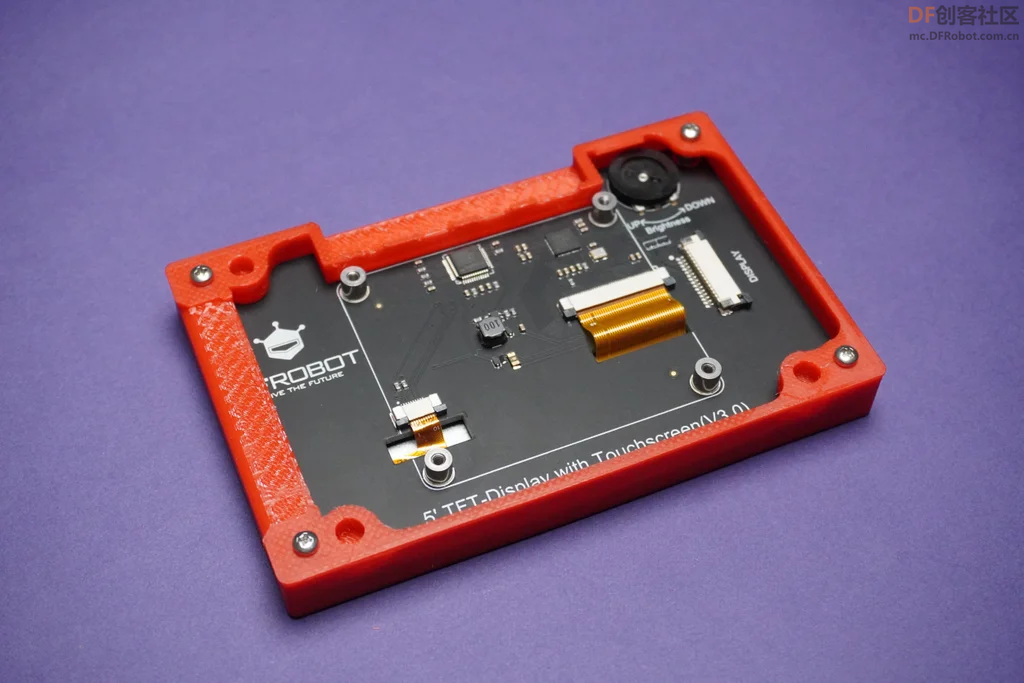 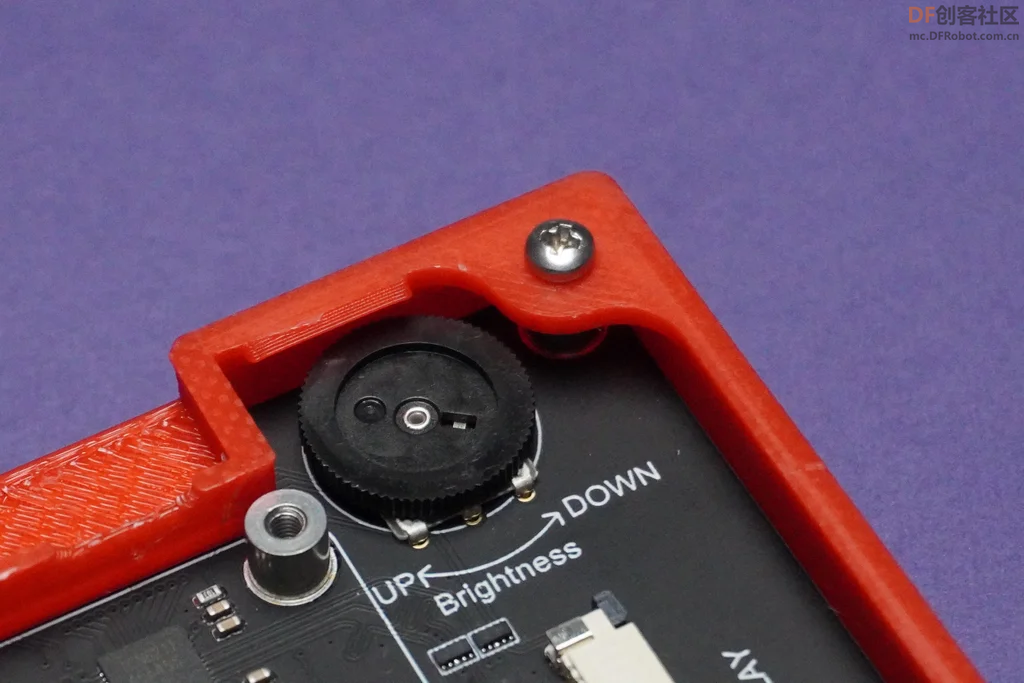 *使用树莓派成像软件将树莓派操作系统安装到SD卡上,并将其插入树莓派。 *我使用的是Raspberry Pi操作系统(32位)推荐的软件。 *然后用螺丝把树莓派放在屏幕上,连接盒子里的显示屏数据线。 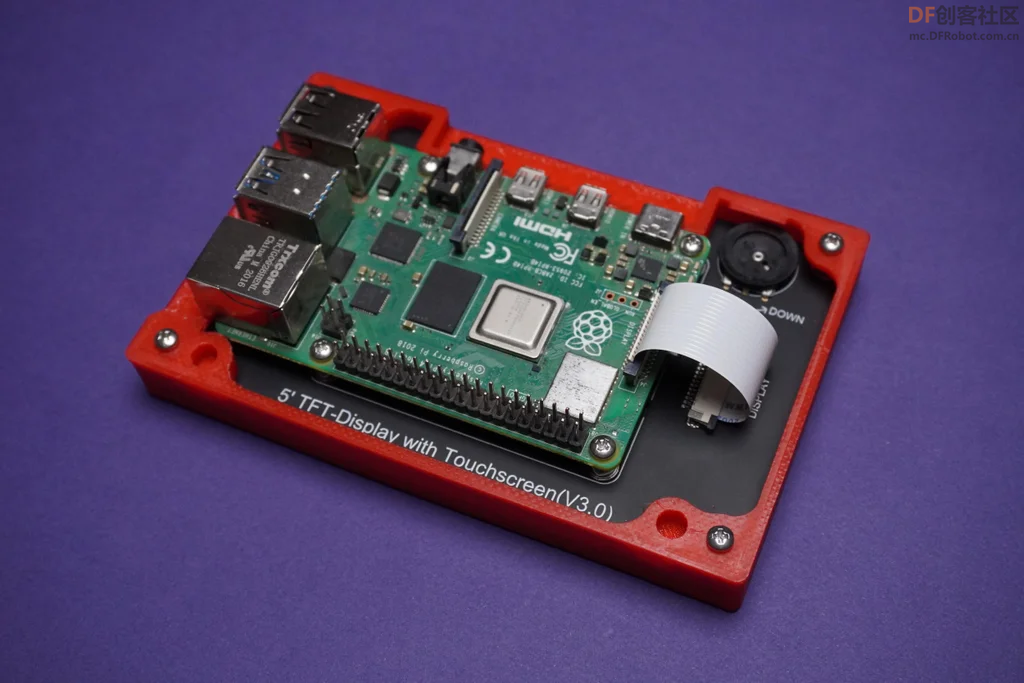 步骤3:如何在3D打印零件中使用金属插件 *这个步骤应该在我们安装display和树莓pi之前完成(步骤20)。 *用烙铁加热金属插件,并将它们插入我的3D打印中。  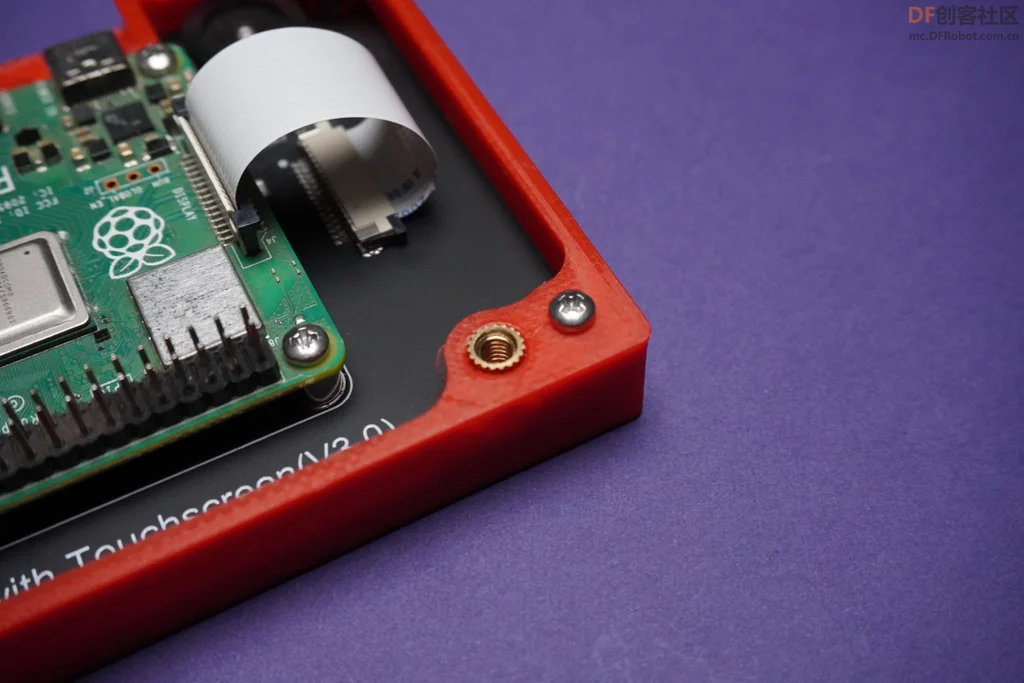 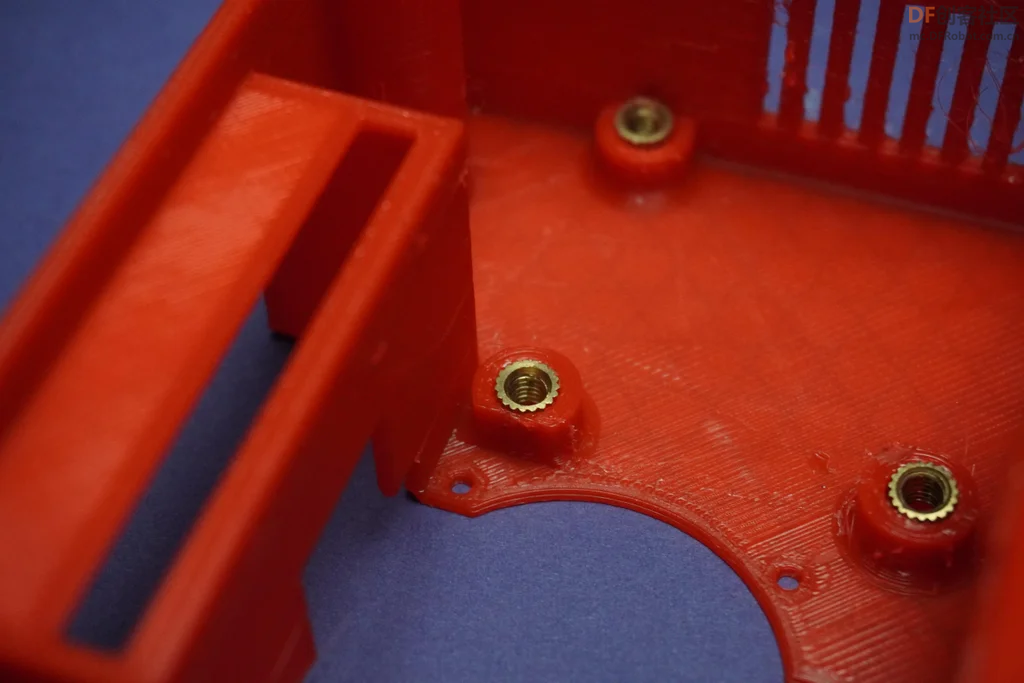 步骤4:组装第2部分 *使用M2.5螺钉和M3螺钉将摄像头模块和风扇固定到位。  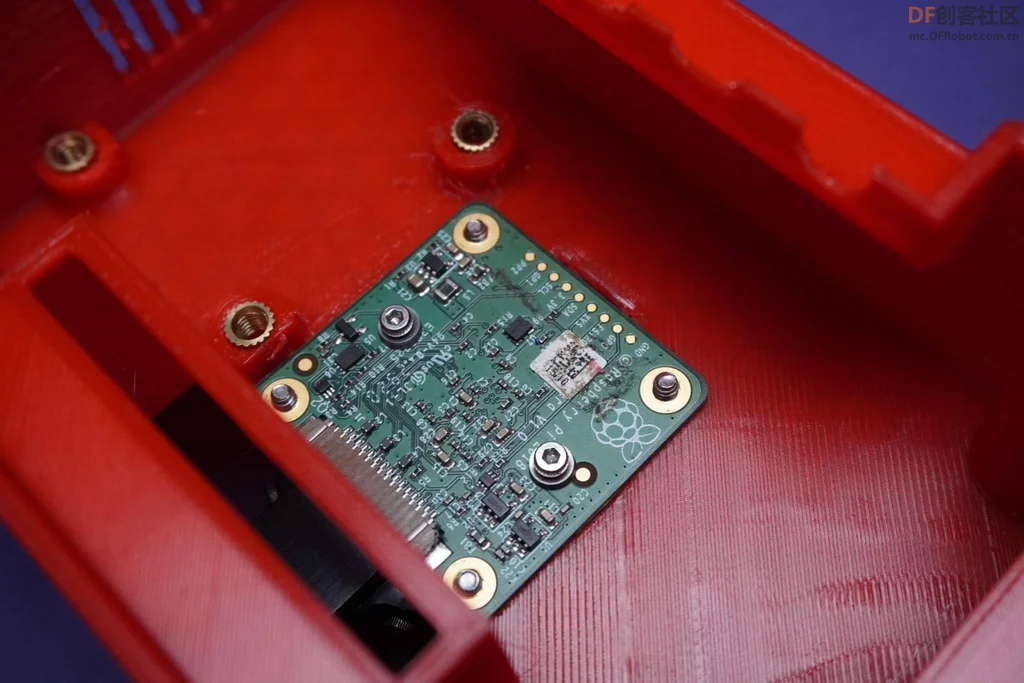  *从外部连接摄像头数据线,然后将其插入内部。   步骤5:电路连接 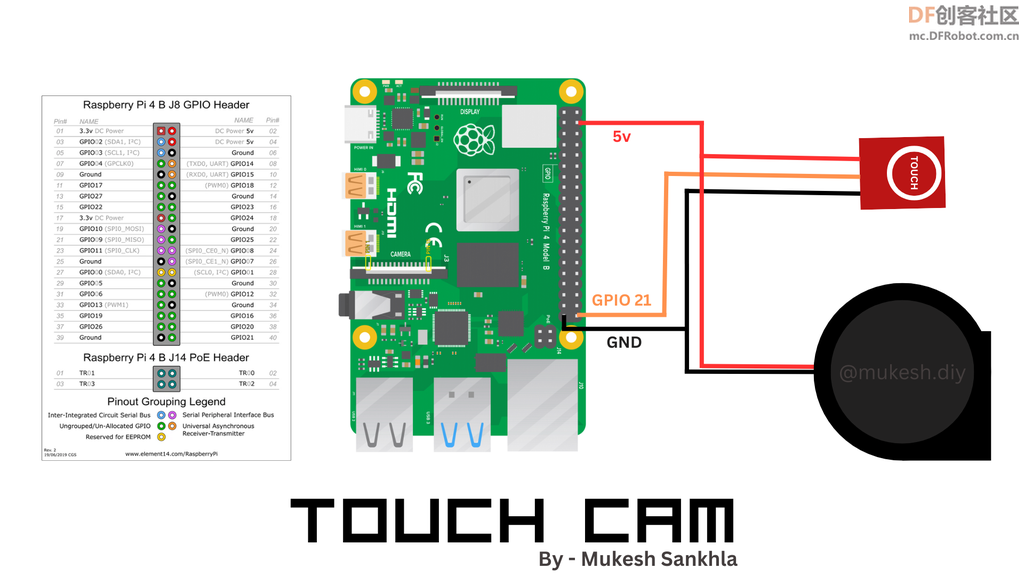 *如图所示,连接触摸传感器输入并为风扇供电。 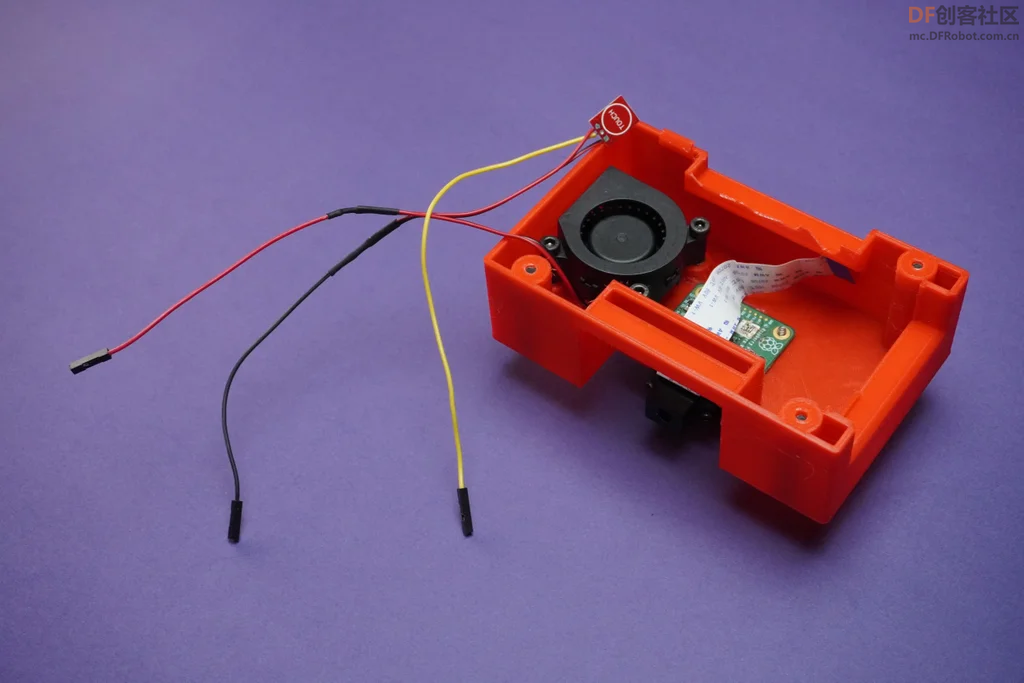 步骤6:组装第3部分 *我没有用遮蔽胶带来固定传感器。 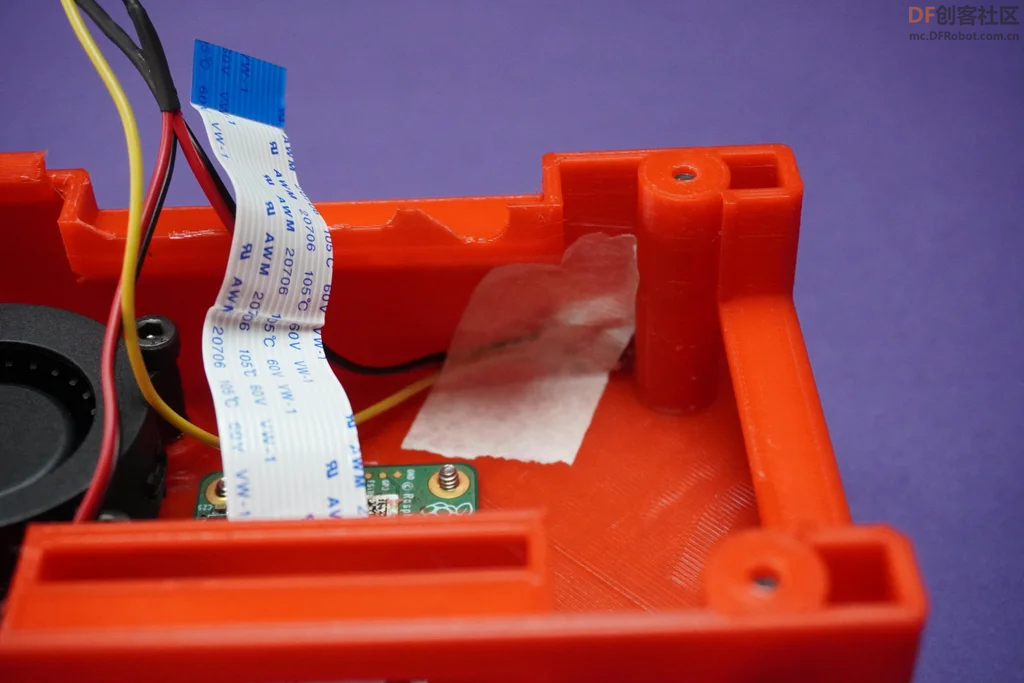 *现在使用M3螺钉将所有部件组装在一起,并连接导线。 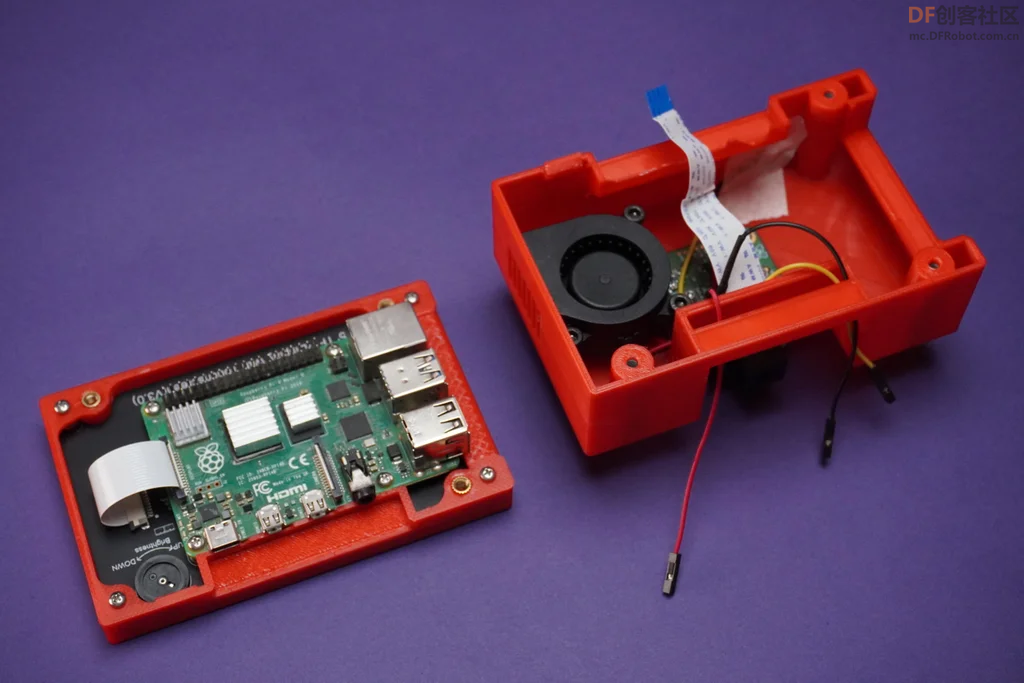 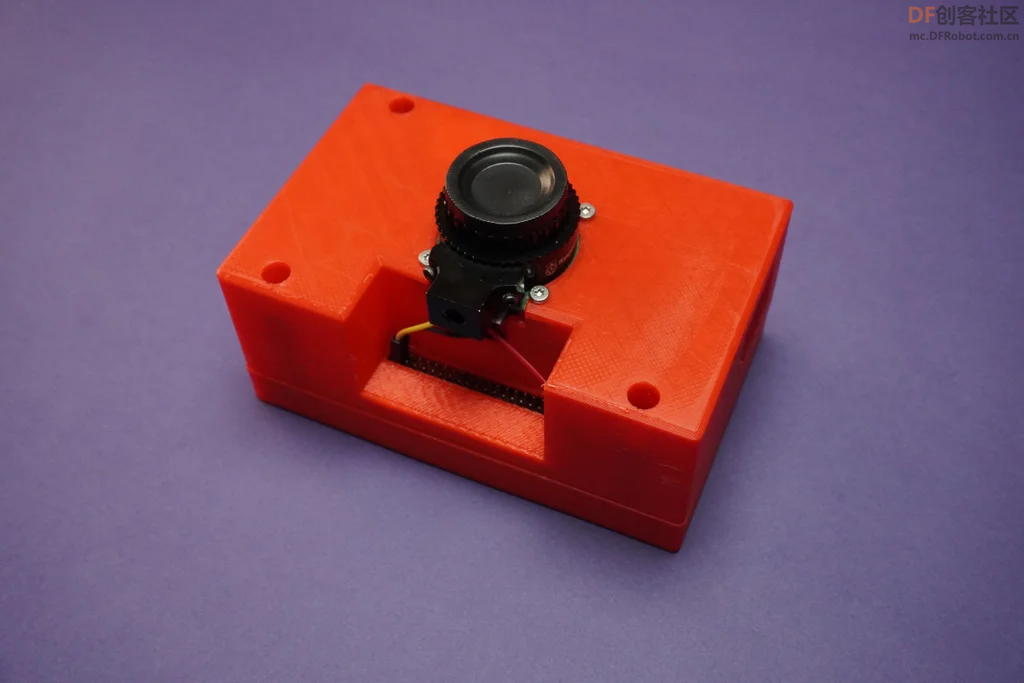  *设计中有一个2mm的错误,因为我不得不通过修剪塑料来调整端口的开口。但别担心,我已经修复了从第19步下载的stl文件中的这个错误。    步骤7:软件设置 *将以下代码复制到Raspberry Pi中,并将其保存为Any_File_Name.py或单击下载 *现在你可以成功运行该代码。*该代码的功能是,当我们运行时,它将启动相机预览,当我们触摸传感器时,它会捕获照片并将其保存到与python代码相同的目录中。 *我个人建议你使用我以前的Pi Cam中的软件-https://www.instructables.com/Pi ... esktopCameraServer/ *按照Pi Cam第8步的说明,在树莓派上设置remote.it平台以进行远程访问。 *有了这个软件设置,你就可以从任何桌面和手持设备远程访问你的树莓派及其相机,你也可以直接从bowser访问相机接口,照片、视频、延时直接到你的设备,这让一切都变得简单无忧,无需代码,也无需进一步的命令。 *在Raspberry Pi的浏览器中设置软件书签localhost:80后,单击右上角的3dots以全屏模式运行浏览器。      如果你想知道我是如何设计这个3D模型的,你可以按照这个完整的教程《Touch Cam - 树莓派相机》来操作。 非常感谢!下一个项目见! 原文作者:Mukesh Sankhla 原文链接:https://community.dfrobot.com/makelog-313385.html 转载请注明来源信息 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






