|
6935| 8
|
[建造日志] 【建造日志】岳坛的机器人 持续更新 |
|
本帖最后由 20171124 于 2018-3-12 13:34 编辑 20180312 机器最后成品图 机甲旋风 出来战斗把!!!! 20180302元宵节更新一下图片 电机还在不断的测试当中 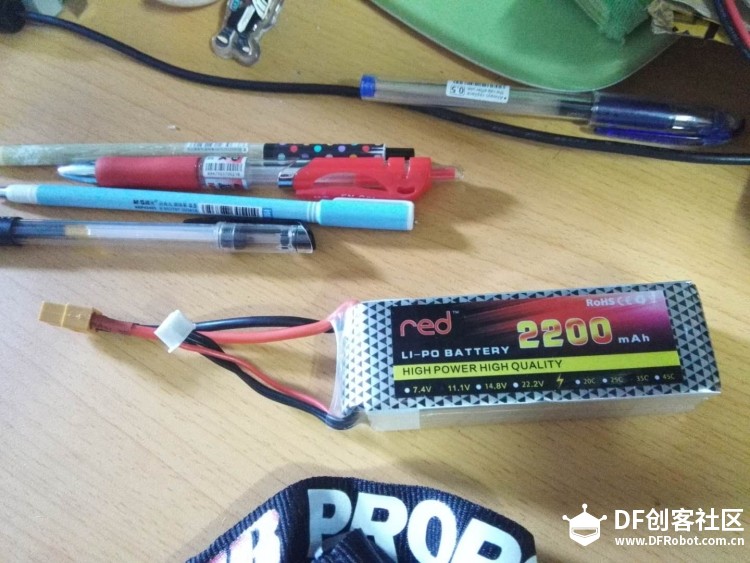  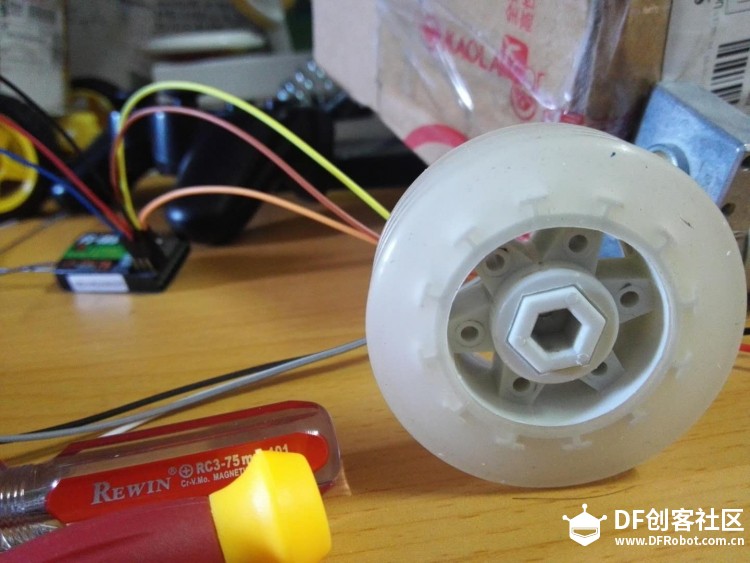  电池用的是7.4V 电池容量:2200mAh 放电倍率:35C 成品重量:168g 插头类型:2S平衡充插头,XT60插头 FLYSKY富斯FS-i6X航模遥控器可DIY6通道 固定翼滑翔机多轴无人机用 富斯I6+IA6接收王大师的DF板子和电机贼好用 因为之前的电调出了点问题 ,打算换一个 所以最近几天都在等快递 东西也在不断地测试当中 之前开的帖子被删了,重开一篇 认真写点mini格斗机器人的建造过程。小白一位,在大师的论坛上多看多问,希望少走冤枉路少花冤枉钱! 1.我想把重量全部留给武器系统,但是我很不喜欢塑料的东西 2.网上有很多模型可以下载 thingiverse或者grabcad 3.用的配件,电机都不同,一般还是要自己做 4.强度件用钛合金有优势 轻很多 而且强度高不少 虽然这种级别可能用不上这么高的需求 不过轻就是王道 5. 玻纤板或者碳纤板  20180206  估计的重量。把电机,轮子,结构性部件,武器和电池加起来要比级别限制的重量低。这意味着有必要减小整个机器人的比例或用更轻的组件。为了更好的分配机器人的重量,一个很有用的技巧:30-30-25-15原则:30%的重量分配到驾驶系统(电机,传动,轮子) 30%武器(武器,电机,传动) 25%结构和护甲 15%电池和电子设备。 当然了这些比例可以根据机器人的类型变化,这代表着平均值。 分割线20180212更新  希望混个全尸烧高香,估计比赛完剩残骸了。借鉴一下自制转鼓格斗机器人(仿minotaur牛头人),气动弹射和滚筒 终于收到王大师的电机和轮子了,观摩了最顶尖级别的水准,尼龙布加环氧树脂成型后碳化,碳纤维生产工艺。 轮子35g,spin doctor,淘宝上逛了一些店,红色把手的T型内六角扳手,the man‘s paradise ,今天才刚刚开始画草图, 车身刚性不行,必须换铝合金的,太软武器带动,皮带容易滑槽;D轴+几米,主机体五毫米,防御护甲12毫米,美国旋转博士的原装防弹玻璃,急需CNC做铝合金的主梁 供电是12V,五百转,400转 电机经过测试 看前面建造的分分钟被秒的节奏 估计人民币玩家很快会占上风 想买三个天蝎星电机电调定制,钛合金3D打印分分秒秒上万,人民币玩家通通用轻量化高强度的特殊材料,cnc整体钎,听说群里几个冠军就是用很便宜的材料做的机器人 搞点汽车车皮,自己钻孔,点焊,希望加工厂早点开门工作,等快递恢复东西到齐就开工,做个方形机,5毫米PC,加12毫米PC 新手保守点 攻击不用太强 能多撑会要紧 (防弹玻璃的材料PC)做护甲 made in China 混控设置 V位混控器 混合控制,将接收端两个通道或三个通道绑定在一起,接收发射端一个通道控制。进行联动,一般控制的每个操作控制都是一个通道,比如遥控器左手,前后管油门,左右管方向舵,右手前后管升降舵,左右是副翼,有时候需要一个操作控制同时管两个或两个以上的通道,这个就是混合控制,简称混控,比如右手左右同时控制副翼和方向舵。 天地飞刚到,一头雾水 酷玩的视频:一分钟小知识——三角翼混控的设置 双摇杆的控都叫板控,枪控就是长的像一把枪一样 买了个凤凰模拟器,用天地飞开飞机 广板正美就是板控 四个通道 megabye 里面好像就是COLson轮子 15通道2.4G自动对频遥控接收器套装 350/550 遥控挖掘机原厂配件 x12s x9d 高仿不如colson ,colson不如台湾 内孔开键槽 抓地力不错 vulcan轮子做的相当漂亮 威卡的轮子好贵 研究一下荷兰人的无刷行走 只能说太会玩 1806 无刷做行走让我想起电动滑板 DYSbe1806 2300KV 因为hobbyking上只有一款DYS是红色的 老毛子制作成本低就直接用扭扭车的轮子加控制板做 行星减速箱 太追求极致 荷兰equinox准备把电调放武器里面 追求极致的紧凑 前框架 hardox450 武器 hardox 电机是HOBBYKING的 哈达豹和大马鸟 大马士铬钢 魔鬼鱼的图纸 专业的机械工程师 :有钱人的世界我们不懂 重度解析一下土豪是怎么玩格斗机器人的 科学地设计机器人 直角波箱 工艺品 数控加工中心必须得标配 伞齿 加工精度 专心发展羽量级 5轴加工中心 Catharsis的Tim是在一个汽车部件承包商工作 专门做结构优化的 200A熔断器 汽车用配件 防止烧电池 无刷电调 如果损坏的话熔断器起到作用 防止烧机器 直接POM轮毂 灌轮胎 然后pom同时相当于轴承 套在轴上 工程塑料有自润滑作用 怎么优化 怎么设计 Neon不太稳定 行走的皮带轮 spektrum Ellis不错 Magnetar之前是Pulsar Supernova 转盘是林奇直连的 设计一个用舵机控制的换向系统 大扭矩的舵机 固定一个微动开关 一个离合器 或者齿轮系统 棘轮 塑料膜包上的降压模块坏了 结构精密 最重要的还是稳定 外部机构 内部电器链接和程序不可抄 逆向工程 达到性能 两公斤 弹射钢瓶 基于PIC单片机控制格斗机器人的研究 小型格斗机器人的研究与开发电机 驱动放大器 相扑 双通道 H桥 铅酸电池 mega byte robot 复位杆 钛合金焊接 5200mah 150c 6s电池 usd玩家 电调主动散热 锅盖做成铲刀壮 spinner 指尖陀螺 外面用软塑料 里面嵌个轴承 发射机 小白EF 70-200MM F2.8L USM 1995/03,1,310G 航模毁一生单反穷一代 现在又来个格斗机器 油管 天地飞六 A6 v- tail 横传类武器 D10混控开发主控程序 自动化 esp abs 主攻辅助控制 一键暴击 乐高格斗 电机内置 滚筒 画图 软件找重心 线切割加工 12.9级螺丝 滑轨 uairror 多试机 陀螺效应 = sys【WC_Paypass_] 碳刷 pwm调速 94123 d4 rwd 全OD 的SD hsp 罗技G27 鸿诺 tt01 座椅 换挡 油门 方向 swtich 长期围观精品贴 ETEK 0709无刷电机3200A单向有刷 ricky 打不过 跑得起 软胎的软度还可以降低 新手建议做四驱车非常稳定 低速 五毫米PC热弯没强度非常高 N20电机驱动的小锤 热熔胶 同归于尽打法 气动驱动行走 撞击对方 电机内置给一个 铝shaft加热 robot market、 键槽 iges文件直接加工 简单的零件cad图纸 二维图纸学习一下标注图纸 风骚走位 简单横向 灵活度 控制力 相对平衡 20180214擒人节 更新 材料准备 天地飞ET07 10通道航模 无人机遥控器 供电和充电:ACE 格氏 格式 3S 11.1V 1800 MAH 锂电池 武器电机:Sunnysky 朗宇 郎宇 电机马达 X2216 2400KV(平轴) 武器电调:FMS 捕食者系列 40A 无刷电调带BEC 涵道航模飞机配件 因为淘宝停运了所以有些东西要等到年后才能继续开动了 |
20171124 发表于 2018-3-2 21:01 本帖最后由 swanglei 于 2018-2-1 00:06 编辑 晚上好,我是岳坛,拖了半个月的文章 最终还是不知道怎么下笔好 好吧,新人入坑 当在设计机器人时首先要记住一点的是“比例因子”, 如果你身体的各个维度都变成原来的两倍,你会变得2倍的高,8倍的重(因为你的体积会翻2?=8 倍)。然而,你的骨肉的横截面的面积却只翻了 2?=4 倍。由于横截面的面积(比如说房子的支柱)意味着防御力和载重能力,你会变得8倍重但只是4倍的强壮。结论:长得越大,力量/重量 越小。 为了补偿这些,你的骨头必须成比例的变粗变短,这样你才不会骨折或发软→_→这就是为什么 犀牛 和 大象 有着又粗又短的腿。反过来说,当你长得很小时,相反的效果就会发生, 蚂蚁 的大小是的人1/100?倍 ,然而他的力量是人的1/100?倍,as a result, 蚂蚁的搬运能力要比人类强100?/100?=100 倍。这一粗略的估计在现实中被验证了:一般人能搬运ta自己二分之一重量的东西,蚂蚁可以举起50倍自己重量的东西,比例因子不就是100啦。 你可能会想:这和格斗机器人有毛关系? Everything! 比如说你设计了一个爱好级(hobbyweight-12bl/5.44kg)的机器人,防御力等方面都挺不错的,你可以保持原有设计不变并参照它设计一个中量级(middleweight-120bl/54.43kg)的,只要你牢记“比例因子”。你要把重量乘10,那机器人三围就乘 三次根号10,比例因子就是2.15 右边是几个drumbots,middleweight Touro,hobbyweight Tourinho, beetleweight Mini-Touro,fleaweight和Pocket-Touro的模型. 12bl的Tourinho和120bl的Touro 比例因子是2(和理论上的2.15很近,但这说明了Tourinho还能再优化一下来达到2.15,因为外形和武器很相似)。这一规则在各个大小的机器人上都起作用,只要他们是相似的,Touro 40倍重于 mini-touro,测量出的比例因子是3.25,和3.42很接近(三次根号40)! 那么问题来了:根据“人和 蚂蚁 ”推测,中量级(touro)确实是相对于爱好级(tourinho) 2.15?/2.15?=2.15倍 不强壮,灵活,有力,耐操吗? Yes and No. Touro可能会没那么强壮,灵活。假如tourinho用气缸作为动力(peneumatic cylinder),那么他的力量取决于活塞的面积,Touro2.15倍大的活塞只有2.15?倍的强壮,然而机器人2.15?倍重。取决于 牵引力 /质量 的机器人驾驶系统的 加速度 也得妥协。这就是为啥相对他们的size, 昆虫 级的机器人看起来更灵活。 然而,Touro不会2.15倍的弱,在使用气缸的情况下,能量来自于 内部容积(乘操作压力)。因此touro大小的气缸有2.15?倍的容积即能量,同时伴随着 2.153 倍增加的体积.同样的研究比如,在直流电机上,测试得出,高品质的直流电机 功率/重量 的数值与 “比例因子” 无关,除此之外,将一个大电机替换成几百个小电机也是值得的,功率产生能量,能量产生破坏,touro和tourinho有着同样的相对功率,因此有着同样的相对破坏力。 这个结论看起来不是很直观,尤其是当你想着touro和tourinho都能够弹飞同等级的对手3尺高,有人可能说tourinho破坏力更大,因为他弹飞对手的高度相对于自己的size更高。 但其实同样的高度没什么好惊讶的,这可以被武器势能证实 E(武器释放的能量)=m(机器人的质量)·g(重力 加速度 )·h(机器人被弹的高度) ,E/m 对于touro和tourinho基本是相似的(前面说过他们俩气缸的能量),g是常量,那么h应该是一样的【惊了】。尽管小机器人相对于自己的size飞的很高,能量和防御力取决于 “比例因子?”,所以破坏力是相对一样的。【relatively】 那么为什么touro和tourinho防御力一样,轴的防御力取决于比例因子的平方而不是三次方?事实上,如果touro用某种细的轴,受压缩和屈曲力时,会2.15倍的低防御力相对于tourinho(依据“ 蚂蚁 推理”并依照比例因子的平方)。但是好的机器人是紧凑且强大的,不应该有细件。最主要的负载对于紧凑的机身来说就是弯曲力和扭转力。但是弯曲和扭转抵抗力取决于“比例因子?”(就像是轴的直径d,弯曲和扭转抵抗力是d?,成比例),而不是屈曲的 平方。因此,touro和tourinho的 “弯曲和扭转抵抗力/质量” 是近似的。 “比例因子”的结论可以直接运用于整台机器,不会显著的降低: “功率/质量” 和 “防御力/质量”。举个栗子,机器人的size乘2,重量就是原来的8倍。“ 蚂蚁 ” 可以类比出:为了维持:“防御力/质量”,机器人某部位的轴的直径应该是 3次根号8≈2.83 倍粗。当你在建造一个用于抵抗屈曲的柱,这是应该考虑到的,但这不关机器人什么事,建造机器人时,直径乘2就已经足够维持“防御力/质量”不变了。1.这意味着你可以应用同样的“比例因子”到每一个机器人部件,2.得减重啊,轴直径乘2.83 导致2倍的质量 1×2would have twice the weight of the one multiplied by 2. 还应该考虑另一个因素:通常来说机器人里的轴都很短,承受着剪刀力。并且,强大的作用力/冲击力还会产生张力和挤压。抵抗这些牵引、压缩和剪切应力的轴的直径d是与d?成比例而不是d?,又可以类比到“ 蚂蚁 ”。在比赛中我们不可能预测哪种力会更突出,当轴作为关键部件时,不能有任何弯曲或断裂,那么轴应用一个更高的“因子:2的1.5次方=2.83”是理所应当的,就像之前的那个例子 总结:你应该用“比例因子”乘或除 机器人部件的三围,除了一些关键部件比如轴,这些应该提高到1.5. 别用大的“比例因子”到整个机器人上,否则将很容易超重(放大时)或强度不够(缩小时)。只用高的比例因子乘轴的直径或者其他关键部件的三围就好。 这些想法可不是在脑内yy出来的,都是经过实践的。作为格斗机器人建设者说,一个wedge-spinner-hammer游戏。wedges往往弹翻spinners,而spinners倾向于切断锤,而锤往往穿刺或损害wedge。但是他们只是“倾向”。 事实是,一个精心设计的机器人可以战胜任何类型的机器人,从大众中脱颖而出。在下面的图中有一个图表显示若干类型的机器人。图中,每个机器人有战胜箭头指向的机器人的倾向。但一个好的设计和良好的操作可以完全改变这一切。 少量的配件就能使情况大有不同,例如安装一个防撞杆/缓冲器当你遇到spinner时,甚至有些针对性改装,比如一个长杆顶住Megabyte的竖杆,右图,并重复的把他推到墙角。但是,能够设计出快速更换的高效的模块化武器是很不容易的 这次先到这里,有点乱,请多多指教 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







