|
6116| 4
|
[建造日志] 【建造日志】岳坛的机器人 |
|
本帖最后由 20171124 于 2018-3-12 13:31 编辑 晚上好,我是岳坛,拖了半个月的文章 最终还是不知道怎么下笔好 好吧,新人入坑 当在设计机器人时首先要记住一点的是“比例因子”, 如果你身体的各个维度都变成原来的两倍,你会变得2倍的高,8倍的重(因为你的体积会翻2?=8 倍)。然而,你的骨肉的横截面的面积却只翻了 2?=4 倍。由于横截面的面积(比如说房子的支柱)意味着防御力和载重能力,你会变得8倍重但只是4倍的强壮。结论:长得越大,力量/重量 越小。 为了补偿这些,你的骨头必须成比例的变粗变短,这样你才不会骨折或发软→_→这就是为什么和有着又粗又短的腿。反过来说,当你长得很小时,相反的效果就会发生,的大小是的人1/100?倍 ,然而他的力量是人的1/100?倍,as a result, 蚂蚁的搬运能力要比人类强100?/100?=100 倍。这一粗略的估计在现实中被验证了:一般人能搬运ta自己二分之一重量的东西,蚂蚁可以举起50倍自己重量的东西,比例因子不就是100啦。 你可能会想:这和格斗机器人有毛关系? Everything! 比如说你设计了一个爱好级(hobbyweight-12bl/5.44kg)的机器人,防御力等方面都挺不错的,你可以保持原有设计不变并参照它设计一个中量级(middleweight-120bl/54.43kg)的,只要你牢记“比例因子”。你要把重量乘10,那机器人三围就乘 三次根号10,比例因子就是2.15 右边是几个drumbots,middleweight Touro,hobbyweight Tourinho, beetleweight Mini-Touro,fleaweight和Pocket-Touro的模型. 12bl的Tourinho和120bl的Touro 比例因子是2(和理论上的2.15很近,但这说明了Tourinho还能再优化一下来达到2.15,因为外形和武器很相似)。这一规则在各个大小的机器人上都起作用,只要他们是相似的,Touro 40倍重于 mini-touro,测量出的比例因子是3.25,和3.42很接近(三次根号40)!  那么问题来了:根据“人和”推测,中量级(touro)确实是相对于爱好级(tourinho) 2.15?/2.15?=2.15倍 不强壮,灵活,有力,耐操吗? Yes and No. Touro可能会没那么强壮,灵活。假如tourinho用气缸作为动力(peneumatic cylinder),那么他的力量取决于活塞的面积,Touro2.15倍大的活塞只有2.15?倍的强壮,然而机器人2.15?倍重。取决于 /质量 的机器人驾驶系统的也得妥协。这就是为啥相对他们的size,级的机器人看起来更灵活。 然而,Touro不会2.15倍的弱,在使用气缸的情况下,能量来自于 内部容积(乘操作压力)。因此touro大小的气缸有2.15?倍的容积即能量,同时伴随着 2.153 倍增加的体积.同样的研究比如,在直流电机上,测试得出,高品质的直流电机 功率/重量 的数值与 “比例因子” 无关,除此之外,将一个大电机替换成几百个小电机也是值得的,功率产生能量,能量产生破坏,touro和tourinho有着同样的相对功率,因此有着同样的相对破坏力。 这个结论看起来不是很直观,尤其是当你想着touro和tourinho都能够弹飞同等级的对手3尺高,有人可能说tourinho破坏力更大,因为他弹飞对手的高度相对于自己的size更高。 但其实同样的高度没什么好惊讶的,这可以被武器势能证实 E(武器释放的能量)=m(机器人的质量)·g(重力)·h(机器人被弹的高度) ,E/m 对于touro和tourinho基本是相似的(前面说过他们俩气缸的能量),g是常量,那么h应该是一样的【惊了】。尽管小机器人相对于自己的size飞的很高,能量和防御力取决于 “比例因子?”,所以破坏力是相对一样的。【relatively】 那么为什么touro和tourinho防御力一样,轴的防御力取决于比例因子的平方而不是三次方?事实上,如果touro用某种细的轴,受压缩和屈曲力时,会2.15倍的低防御力相对于tourinho(依据“推理”并依照比例因子的平方)。但是好的机器人是紧凑且强大的,不应该有细件。最主要的负载对于紧凑的机身来说就是弯曲力和扭转力。但是弯曲和扭转抵抗力取决于“比例因子?”(就像是轴的直径d,弯曲和扭转抵抗力是d?,成比例),而不是屈曲的 平方。因此,touro和tourinho的 “弯曲和扭转抵抗力/质量” 是近似的。 “比例因子”的结论可以直接运用于整台机器,不会显著的降低: “功率/质量” 和 “防御力/质量”。举个栗子,机器人的size乘2,重量就是原来的8倍。“” 可以类比出:为了维持:“防御力/质量”,机器人某部位的轴的直径应该是 3次根号8≈2.83 倍粗。当你在建造一个用于抵抗屈曲的柱,这是应该考虑到的,但这不关机器人什么事,建造机器人时,直径乘2就已经足够维持“防御力/质量”不变了。1.这意味着你可以应用同样的“比例因子”到每一个机器人部件,2.得减重啊,轴直径乘2.83 导致2倍的质量 1×2would have twice the weight of the one multiplied by 2. 还应该考虑另一个因素:通常来说机器人里的轴都很短,承受着剪刀力。并且,强大的作用力/冲击力还会产生张力和挤压。抵抗这些牵引、压缩和剪切应力的轴的直径d是与d?成比例而不是d?,又可以类比到“”。在比赛中我们不可能预测哪种力会更突出,当轴作为关键部件时,不能有任何弯曲或断裂,那么轴应用一个更高的“因子:2的1.5次方=2.83”是理所应当的,就像之前的那个例子 总结:你应该用“比例因子”乘或除 机器人部件的三围,除了一些关键部件比如轴,这些应该提高到1.5. 别用大的“比例因子”到整个机器人上,否则将很容易超重(放大时)或强度不够(缩小时)。只用高的比例因子乘轴的直径或者其他关键部件的三围就好。 这些想法可不是在脑内yy出来的,都是经过实践的。作为格斗机器人建设者说,一个wedge-spinner-hammer游戏。wedges往往弹翻spinners,而spinners倾向于切断锤,而锤往往穿刺或损害wedge。但是他们只是“倾向”。 事实是,一个精心设计的机器人可以战胜任何类型的机器人,从大众中脱颖而出。在下面的图中有一个图表显示若干类型的机器人。图中,每个机器人有战胜箭头指向的机器人的倾向。但一个好的设计和良好的操作可以完全改变这一切。 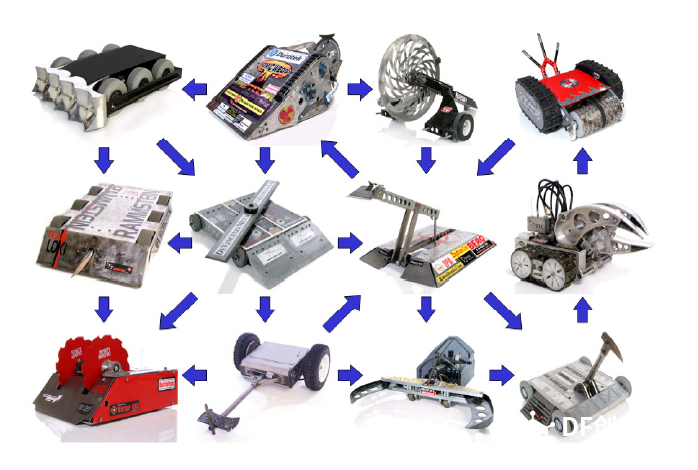 少量的配件就能使情况大有不同,例如安装一个防撞杆/缓冲器当你遇到spinner时,甚至有些针对性改装,比如一个长杆顶住Megabyte的竖杆,右图,并重复的把他推到墙角。但是,能够设计出快速更换的高效的模块化武器是很不容易的 这次先到这里,有点乱,请多多指教 |
|
本帖最后由 20171124 于 2018-3-22 12:09 编辑 估计机器人的重量。把电机,轮子,结构性部件,武器和电池加起来要比级别限制的重量低。这意味着有必要减小整个机器人的比例或用更轻的组件。为了更好的分配机器人的重量,一个很有用的技巧:30-30-25-15原则:30%的重量分配到驾驶系统(电机,传动,轮子) 30%武器(武器,电机,传动) 25%结构和护甲 15%电池和电子设备。 当然了这些比例可以根据机器人的类型变化,这代表着平均值。 当设计,起草机器人时,记住KISS原则:keep it simple, stupid! 20180322更新 铁甲旋风 有待继续分更新 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






