|
61821| 31
|
[项目] Arduino高级应用 | 高精度自动导航的越野平衡小车 |

|
翻译、编辑:Sophie 资料来源:http://makezine.com 作品基本介绍 ======================================  项目名称:高精度自动导航平衡小车 制作时长:3-8小时 制作成本:$400-$500 难度等级:较难 ArduRoller 是一款自平衡、防摔倒、能够快速识别障碍并进行自主导航的机器人,它超越了以往的传统小车,在多方向识别、不平坦地形以及斜坡场景下均可使用。 自平衡小车的核心是惯性测量单元(IMU,inertial measurement unit),一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。这9个传感器以每秒高于1000次的取样频率,再结合一种叫DCM的数学滤波器,水平相对较高的编码将能够通过DCM获取角度和旋转速率等数据以实现平衡。 为了让小车实现导航,必须精确地知道小车的位置以及它将要去的地方。但是GPS只能精确到几米,而小车需要更高的精确性,车轮编码器允许到厘米级的精度,是GPS很好的补充。 作者选用了3D Robotics的APM 2.5自动驾驶仪,因为它集成了所有需要的传感器,所有的软件都是免费和开源的,制作起来也很方便。基于DIY 无人机社区开发的ArduPilot系统,能够快速完成自动导航的小车机器人。 图文教程专区 ====================================== 1. 材料搜集:电机和车轮 选用带有编码器单元的有刷直流电机( brushed DC motors),34-1齿轮减速机能够有效增加扭矩。另外,越野车轮能够帮助小车适应各种不平坦的地形。 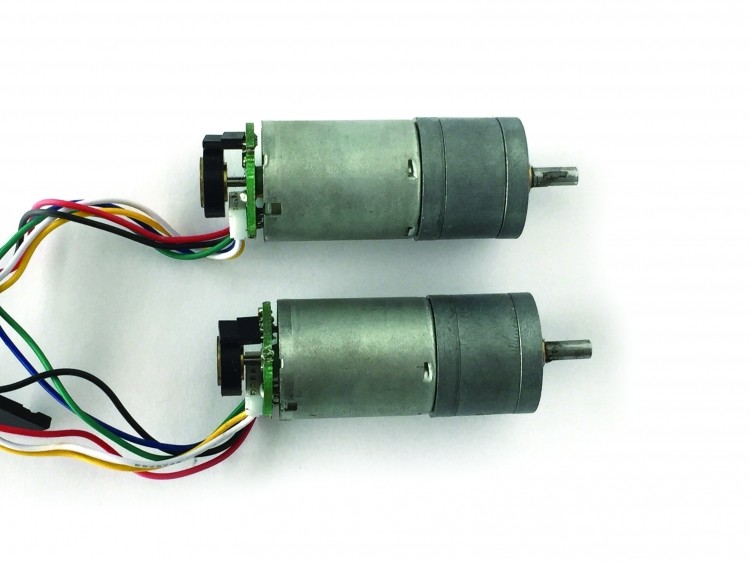  2. 3D打印车体部件 车体部件的3D模型文件可在Thingiverse网站上下载。
3.组装电机 在3D打印基座中安装电机,为了防止电机松动可以使用热熔胶。 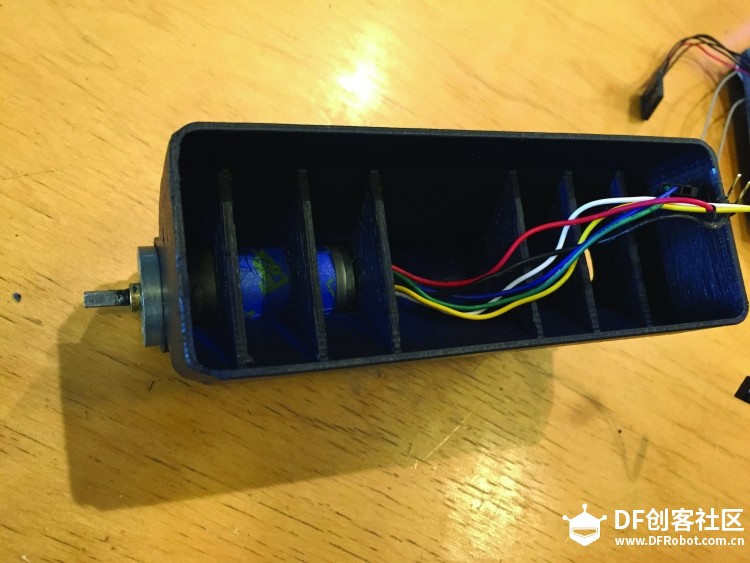 4.电路连接 如图所示,电子部件包括APM开源自动驾驶仪、电机、逻辑电平转换器、Arduino迷你板等;将GPS模块和遥控无线电模块连接以实现自动运行;为了实现对小车的手动控制,需要增加R/C接收器,再将APM模块的跳线与PPM模块相连。 (注:电路图中的部分元器件来源SparkFun,用户可根据情况自行选择类似的硬件替换。) 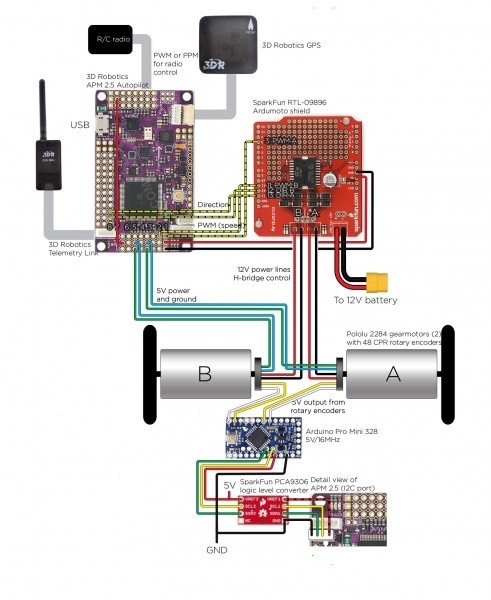 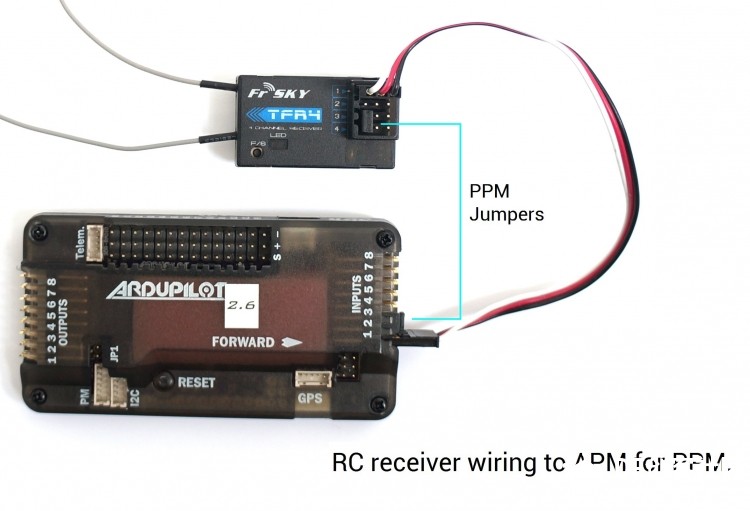 将电子部件固定在泡沫板上;将主板与电机相连;整块泡沫板放入车体中部;要确保自动驾驶仪的“正面”箭头直立放置。 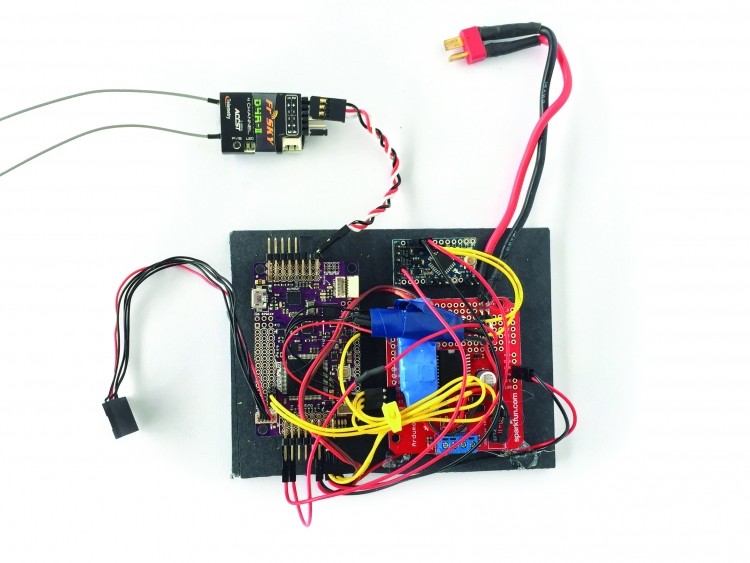 5.车体组装 整个车体分为三个部分,将其各自组合起来;电池隐藏在最上面的圆拱形装饰底部;可以在小车的侧面增加一个开关;安装越野车轮;车体内部的LED亮的时候可以透过有机玻璃看到里面的电路;安装遥控无线电模块,可用于接收远程任务或者直接控制小车。   6.编程(点击阅读原文查看完整下载路径) 点此下载源文件(APM 2.5 or 2.6)并且上载到APM模块,使用修改过的Arduino IDE—点此下载ArduPilot-Arduino (Windows or Mac); 点此下载车轮编码源文件(Arduino Pro Mini),然后使用正常的Arduino IDE上载至Arduino Pro Mini板; 如果要实现自主任务,可以使用Mission Planner( PC版,只适用于Windows )或者DroidPlanner 2(安卓版)。 7.使用 整个小车制作完成后可以使用无线遥控器进行控制,或者通过GPS给定一个自主任务。 Mission Planner 软件能够帮助你使用谷歌地图追踪小车的路径、速度和方向,运行你自己的Python文件,下载和分析任务日记等等。 可以给小车增加一个视频发射模块,或者用GoPro录制高清视频,甚至增加声呐这样小车就能完全实现避障功能!  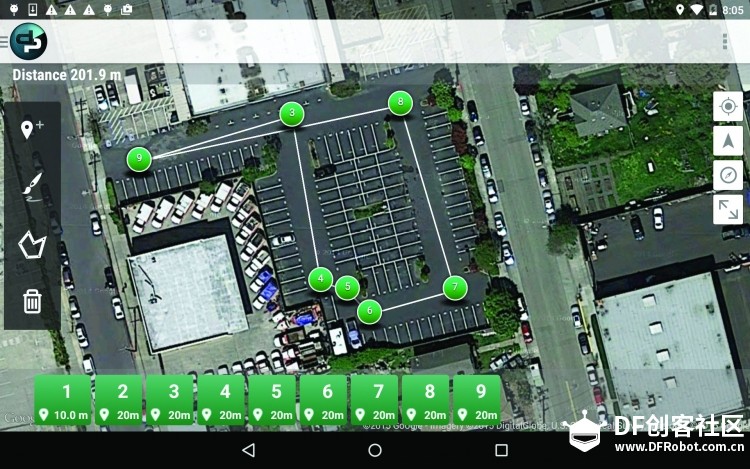 关于作者 Jason Short 是3D机器人公司(3D Robotics)的设计总监,他有着超过20年的产品设计经验,曾为HTC、三星、索尼、LG等公司从事消费级产品设计和用户体验研究的相关工作。2009年他协助开发了ArduPilot,一款适用于R/C飞行器的开源自动驾驶仪。随后2010年他又发明了无人驾驶直升机 ArduCopter并在全球受到广泛使用。  |
68E7qYNdSJfL 发表于 2022-6-18 12:21 您好,请问您还有复现的代码吗,我打开代码链接现在都是失效的了,谢谢您。如果还有能发我一套吗ckkcust@126.com |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 活跃会员
活跃会员
 牛X认证
牛X认证
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






