|
6708| 6
|
[项目] 走马灯 |

|
本帖最后由 hnyzcj 于 2024-4-8 00:03 编辑 【项目源起】 本次作品是为接待来自于澳门嘉诺撒圣心英文中学的同学而设计的。根据上级领导的要求,能够体现多学科融合,能够提供给学生一个动手操作的体验…… 为此,我们信息教研组联合物理、历史三学科一起拟定了作品主题为走马灯。具体分工如下:物理组从走马灯实现的原理角度进行教学;历史组从走马灯的历史角度进行讲述,并将南京相关景点内容带入,作为走马灯灯笼面;信息组从技术实现角度进行教学,最终帮助学生制作出走马灯。 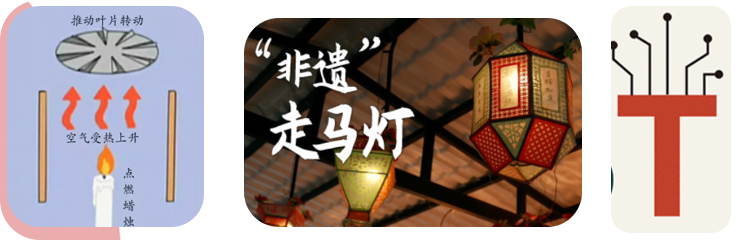 物理:走马灯原理 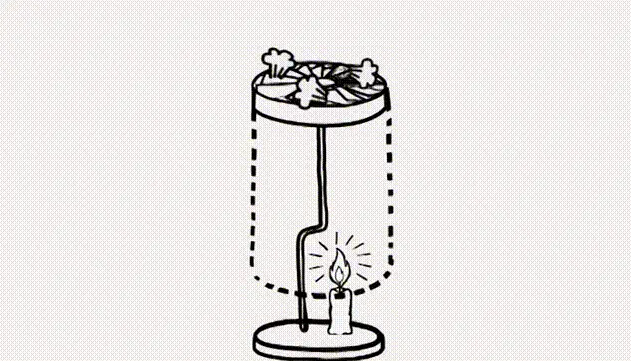 走马灯的工作原理是基于热空气上升的物理现象。走马灯内部有一个蜡烛或灯来产生热量,当热量增加时,空气体积膨胀并上升,形成一股向上的气流。这个上升的气流推动灯笼内部的叶轮旋转,叶轮通常与轮轴相连,轮轴上附有剪纸或类似图案。随着叶轮的旋转,这些图案的影子被投射到灯笼的屏幕上,从而产生了动态的视觉效果,给人一种图像连续运动的感觉。总的来说,走马灯利用了热空气上升的原理,通过叶轮的旋转和图案的投影,实现了其独特的视觉效果和娱乐价值。 历史:走马灯的历史  正月15元宵节,民间风俗要挂花灯,走马灯为其中一种。外形多为宫灯状 ,内以剪纸粘一轮 ,将绘好的图案粘贴其上 。燃灯以后热气上熏 ,纸轮辐转 ,灯屏上即出现人马追逐 、物换景移的影像 。在宋朝就有走马灯 ,当时称 “马骑灯 ” 。元代谢宗可咏走马灯诗云 :“ 飙轮拥骑驾炎精 , 飞绕间不夜城 ,风鬣追星来有影,霜蹄逐电去无声 。秦军夜溃咸阳火 ,吴炬霄驰赤壁兵 ; 更忆雕鞍年少日 ,章台踏碎月华明 。”因多在灯各个面上绘制古代武将骑马的图画,而灯转动时看起来好像几个人你追我赶一样,故名走马灯。 (1)功能设计:走马灯效果(等面转动、RGB灯光秀)、AR数字人 (2)结构设计:灯笼面的安装、硬件的安放、电路连线等。 (3)文化设计:南京地域文化、历史的体现、自主设计灯笼画面。 【项目展示】  【功能简介】 本项目作品具备以下功能, (1)走马灯效果:通过光控传感器、RGB灯带、舵机模拟走马灯效果。 (2)数字人播报:手机扫描二维码,数字人播报走马灯历史的介绍。 【硬件材料】
表1项目器材清单 【制作过程】 (1)电路连线:光线传感器连接主控A1,灯带连接主控D5,舵机连接主控D8如下图所示。(舵机由于使用3P的延长线,其接线顺序为白红黑—数字口绿红黑) 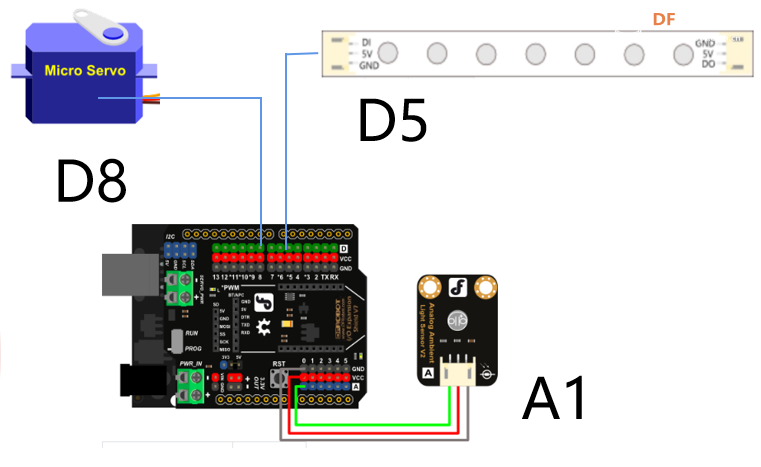 (2)代码编写:主程序逻辑:通过光线传感器来判断是否执行跑马灯效果。而跑马灯效果,定义为一个函数,该函数中编写控制灯带和舵机的程序。 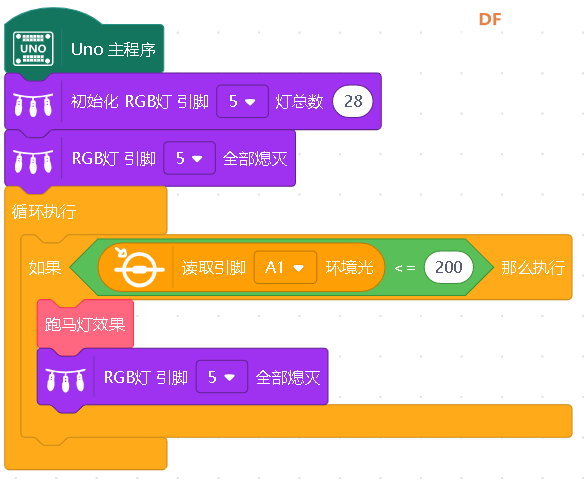 跑马灯效果函数(可定义多个跑马灯效果) 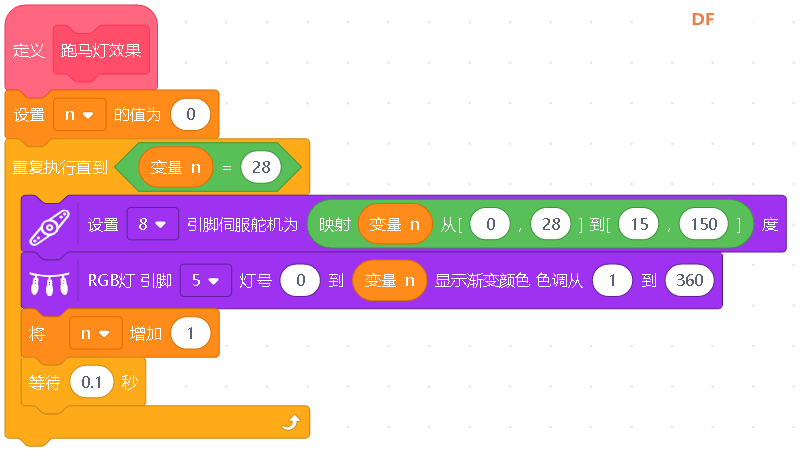 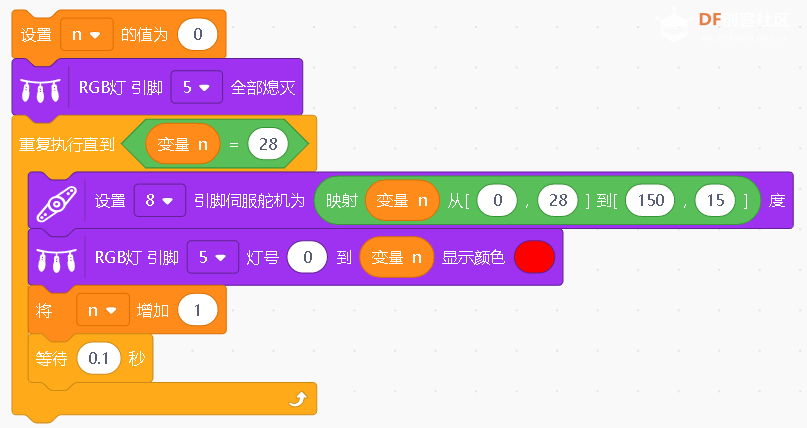 (3)结构制作 (a)灯罩部分:为了能够将南京特色景点画面留在灯笼面上,我们这里使用灯箱布这种材料,将景点图片印刷上去。灯笼采用六面体的结构,其中四个面画面提前设定好,留白两个面给学生自主设计粘贴或绘制。 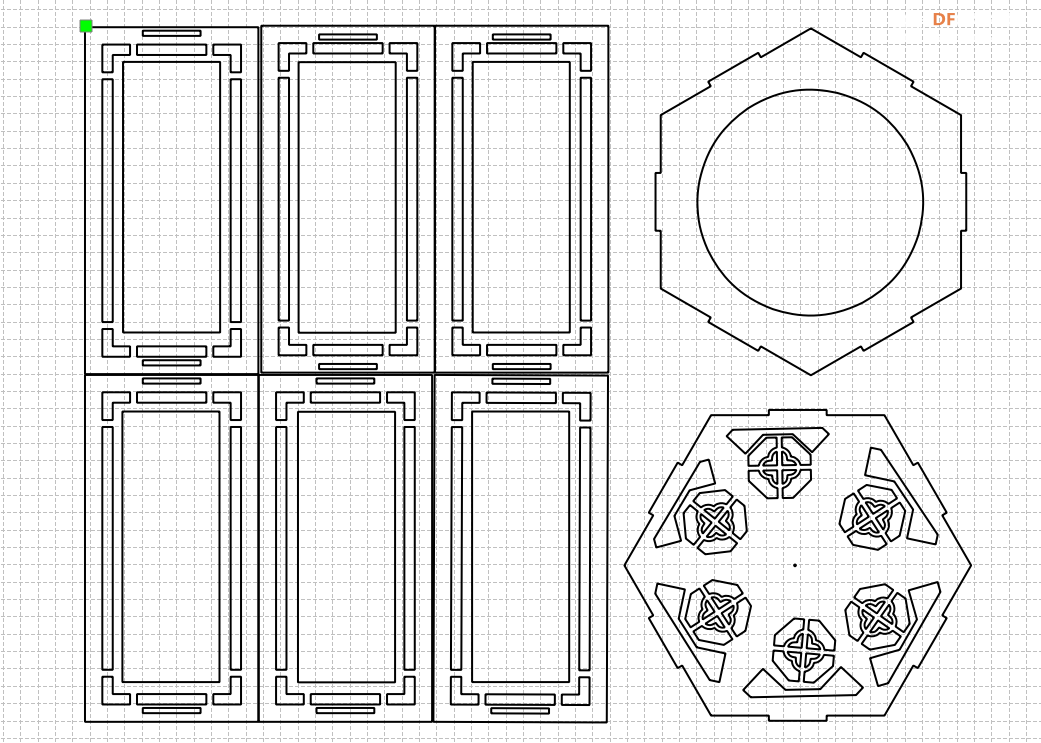 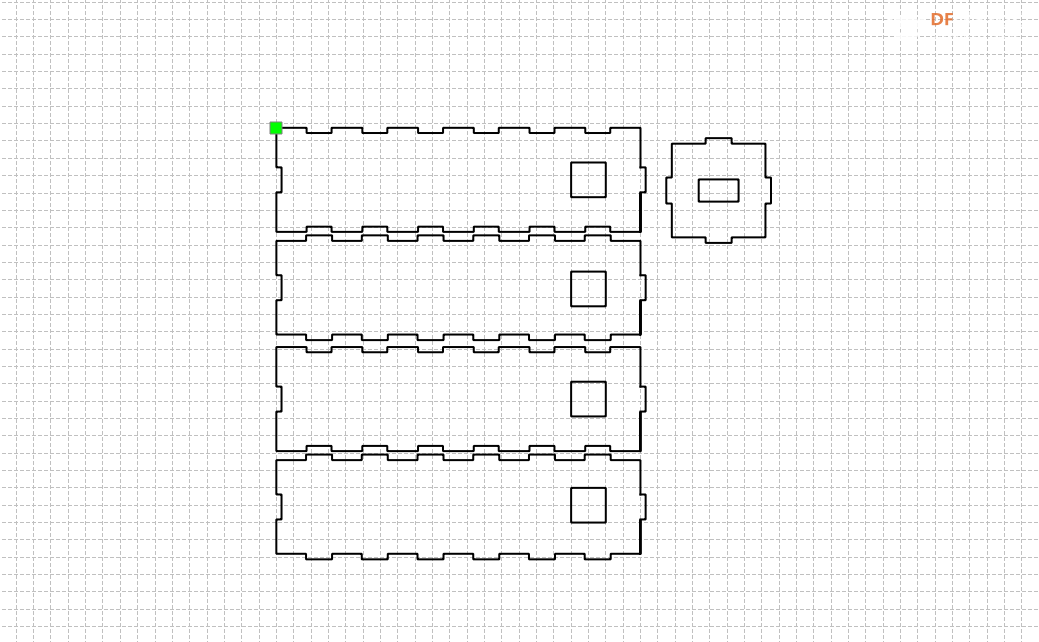 (c)底座部分:固定主控及内部走线控制。 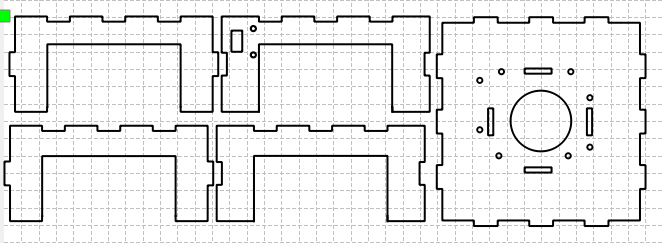 (d)安装结构:取出除顶板及托板以外的结构件组装无盖盒体,如下图所示 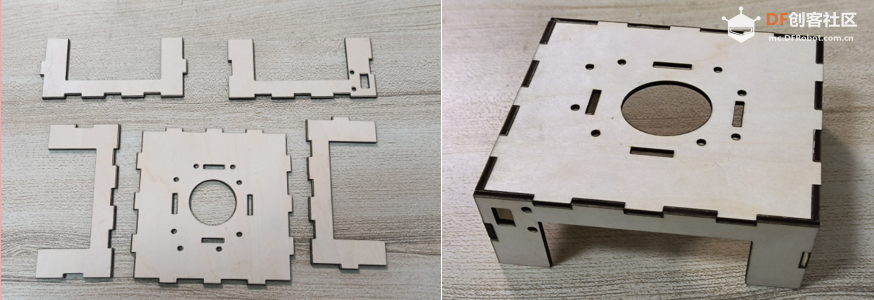 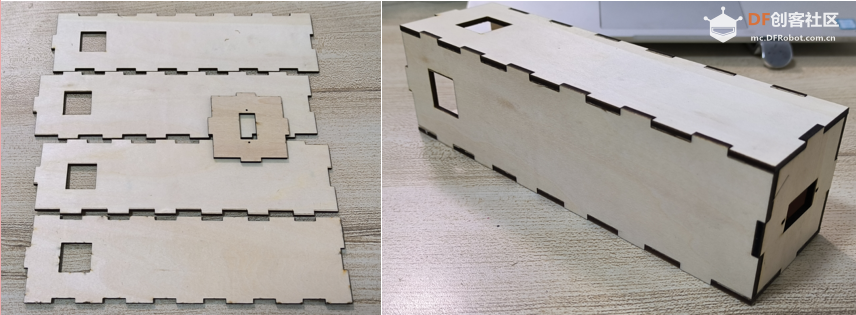  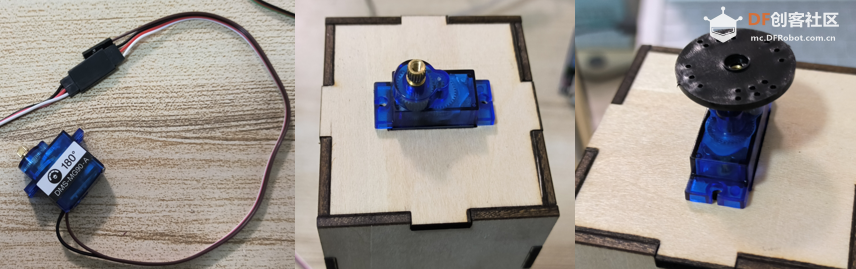 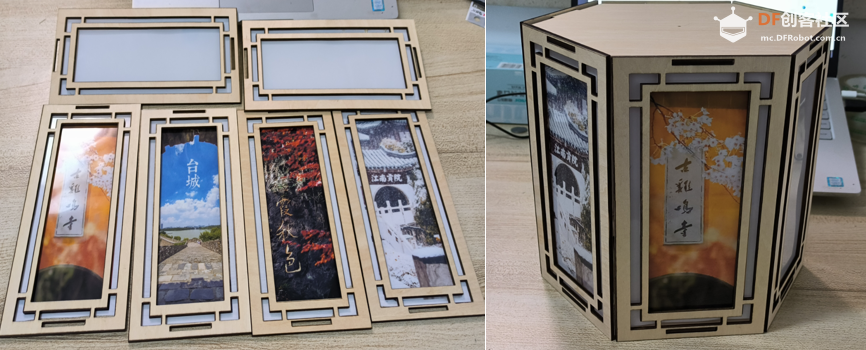 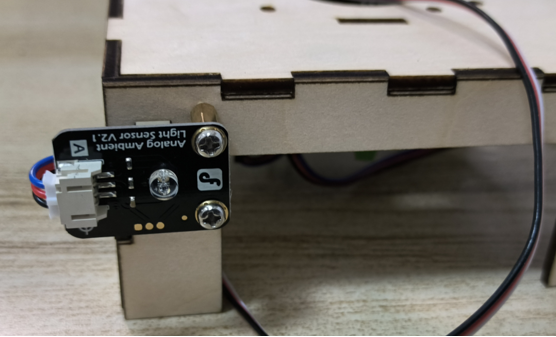 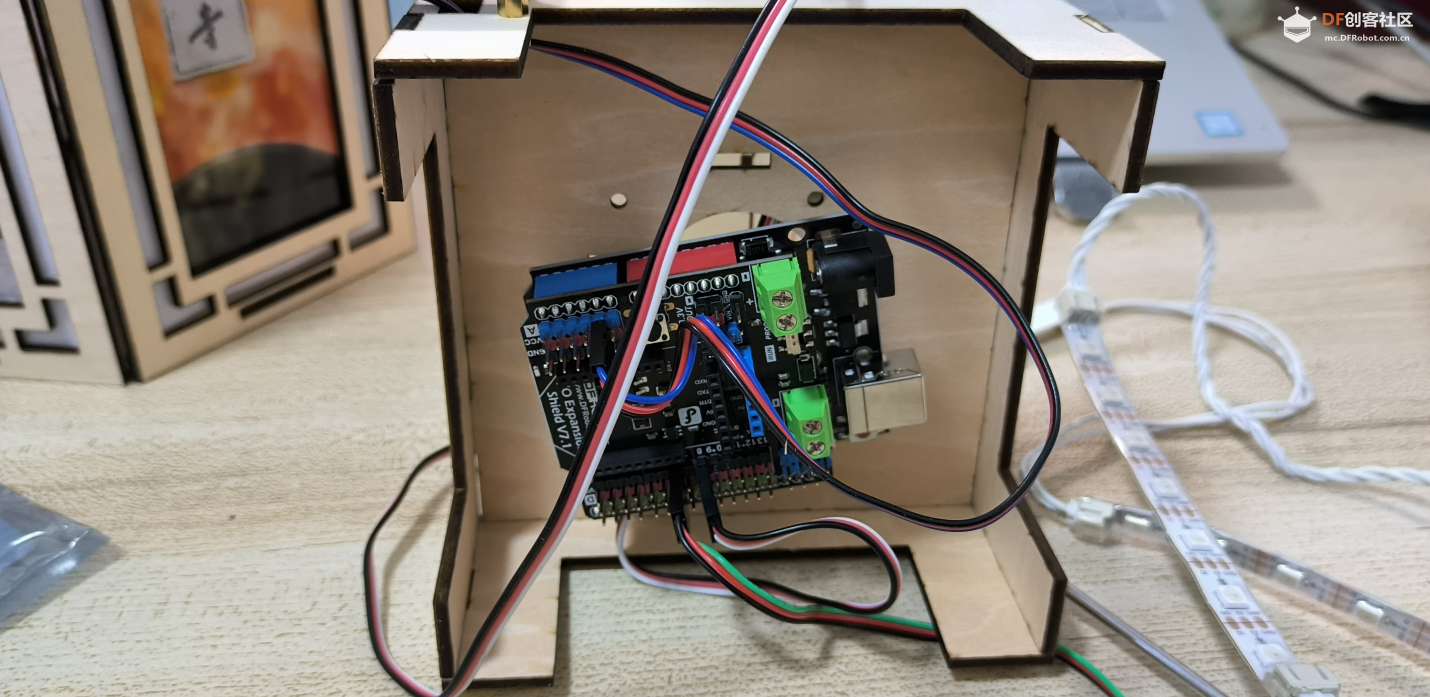 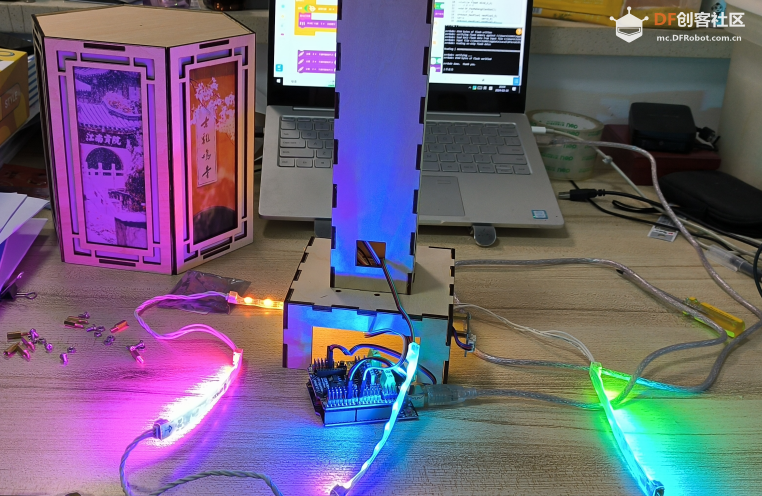 【制作数字人】 Step1:打开“商汤如影”完成用户注册,进入工作台,鼠标点击“开始制作”制作数字短视频。  Step2:选择视频模式为横屏模式如下图所示  step3:鼠标点击“数字人库”从中选取合适的数字人形象。 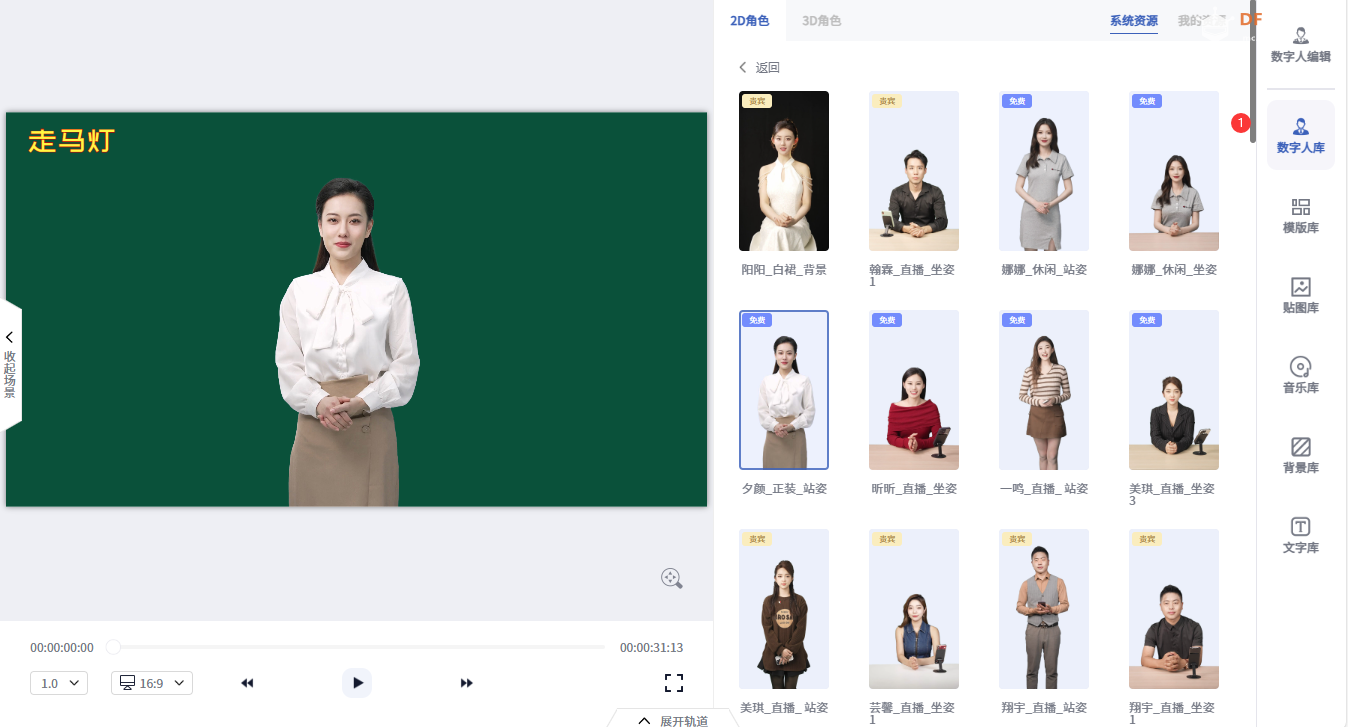 step4:鼠标点击“数字人编辑”在红框中输入需要播报的文本内容。  step5:鼠标点击“字幕”选项卡设置字幕样式。 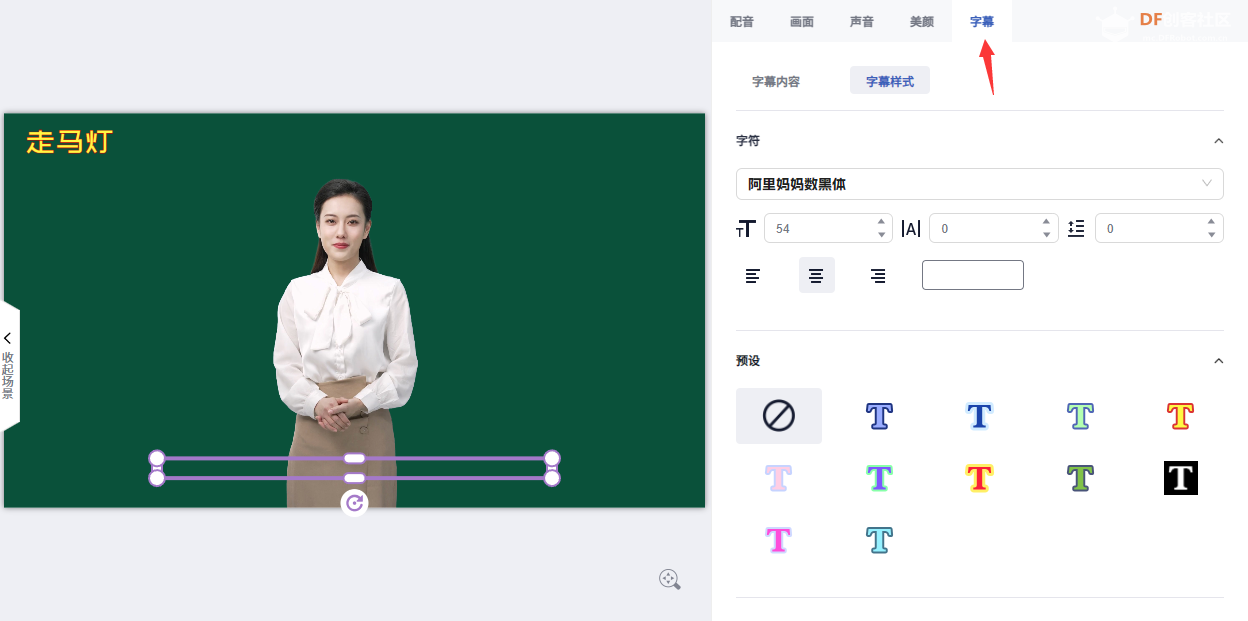 step6:鼠标点击合成视频按钮生成数字人视频。 【制作二维码】 登陆网址:https://www.kivicube.com/AR在线制作平台,注册用户登陆平台。  选择平面AR选项进入平面AR界面如下图所示。鼠标在①处理点击AR视频,再选择上传素材,这里我们将商汤如影生成的视频导入,并将其拖拽到平面中调整到合适的位置上。 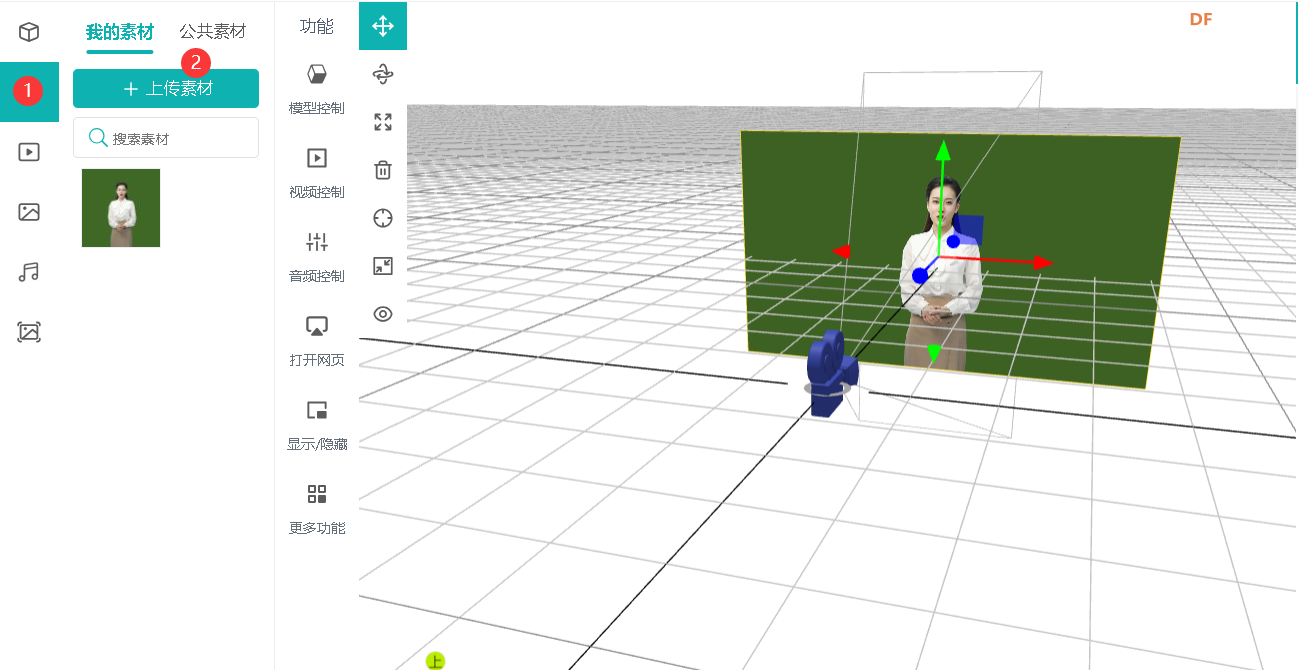 完成上步操作后,鼠标点击“视频控制”如下图①处,在弹出的对话框中设置视频为“video”,类型为“播放”,触发条件为“场景开始”如下图所示。 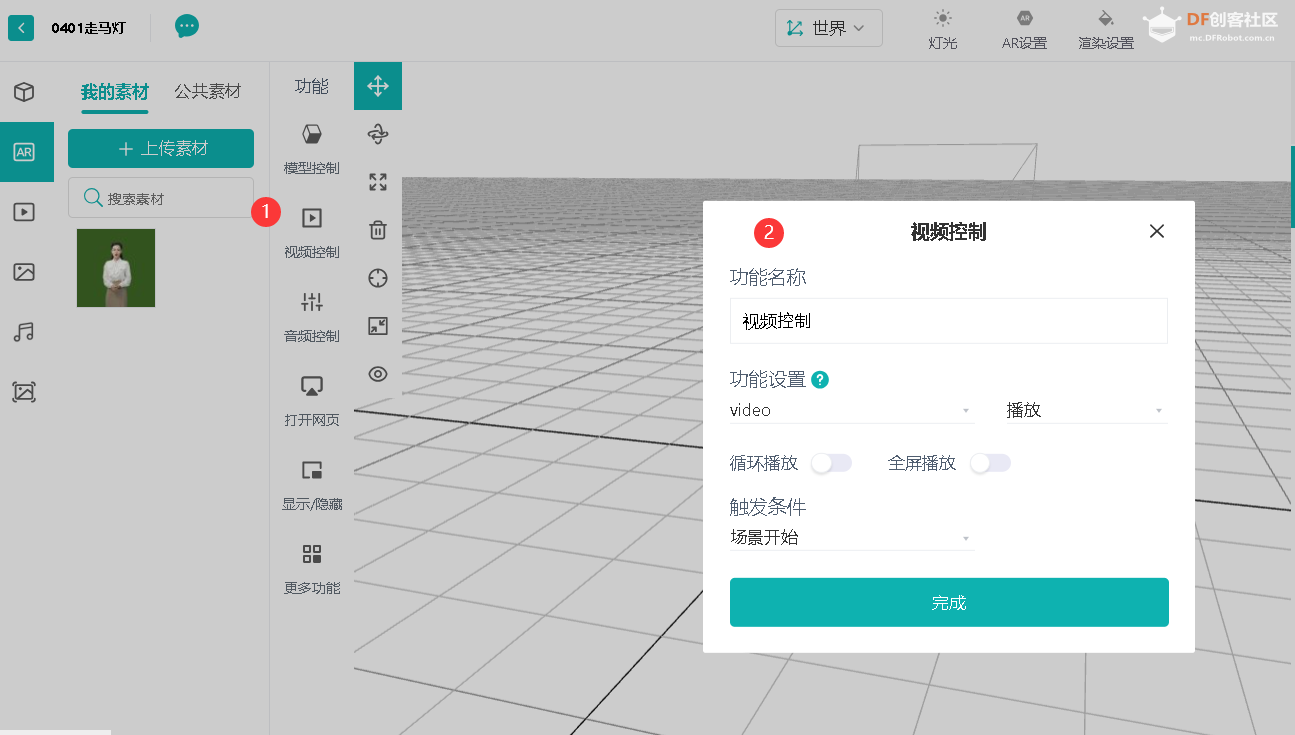 点击页面右上角“保存”按钮对当前工作进行保存,点击“分享按钮”弹出观看视频的二维码,将其保存,并设置识别图。  【测试运行】 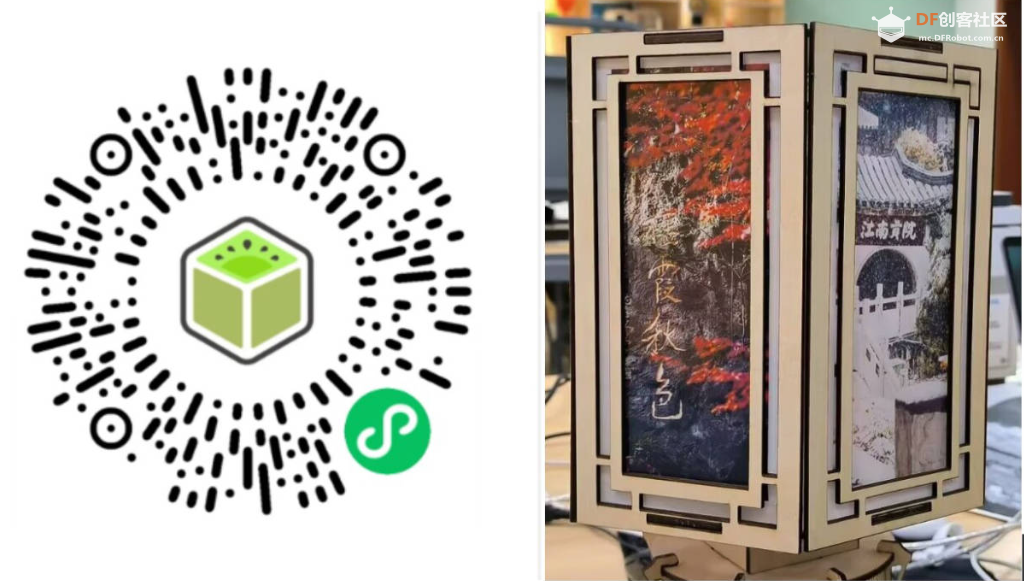      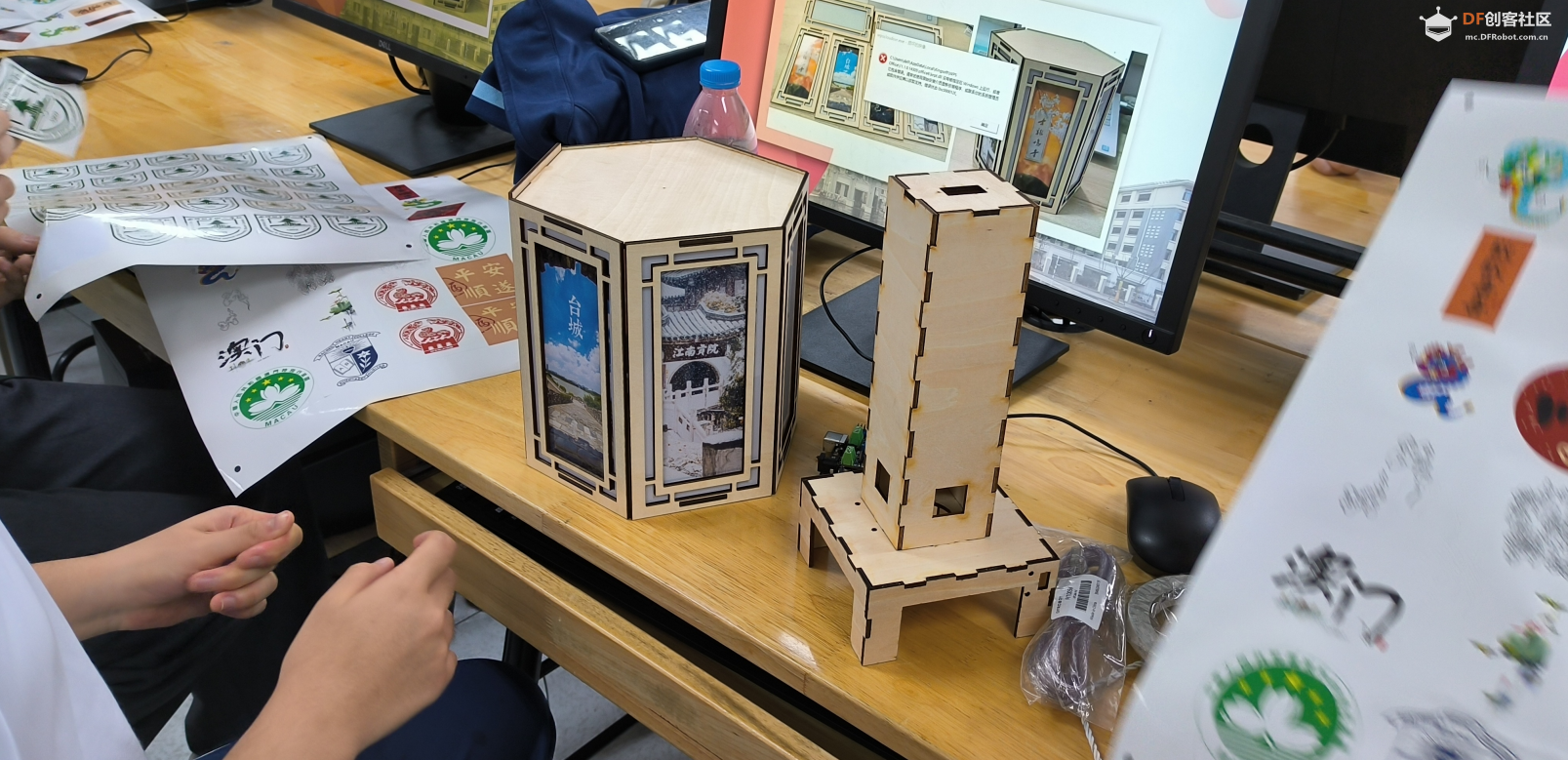   |
|
本帖最后由 DFHJ9HmwUyp 于 2024-6-5 09:09 编辑 请问附件中lcpx文件用什么软件打开 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






