|
11301| 11
|
[常见问题] Bluno Remeo控制直流电机转向问题 |
Cain 发表于 2015-6-20 12:15 程序很简单,如下: 板子和电机都是共同通过Bluno Remeo板的vin口接电池盒供电(5个5号电池)。因为小车现在在家里,实物图没法上,示意图如下: 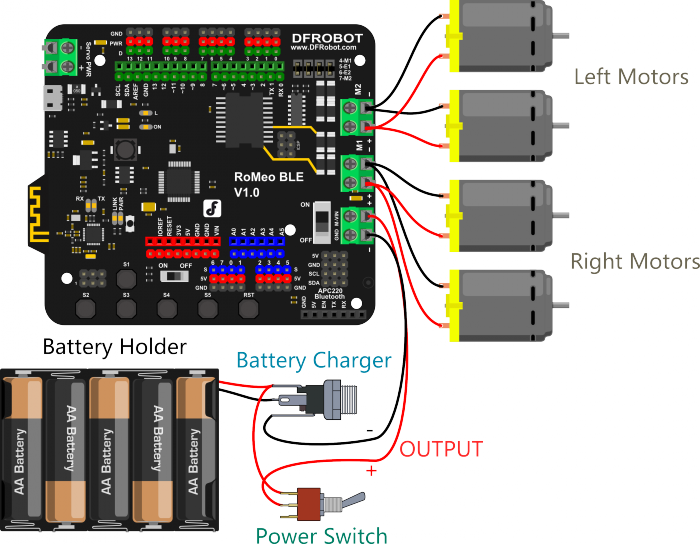 唯一不同是目前测试只接了两个电机。 |
本帖最后由 jackykang 于 2015-6-20 22:08 编辑 Cain 发表于 2015-6-20 17:27 电机电源旁的开关我确定是拨到on了,要不然也供不了电。但是在工作时,我的USB供电是断开的,只有电机电源供电。 您的意思是在接电池盒的同时还要接USB给板子供电?如果这样的话那我的小车怎么跑?不可能车后面一直接着电脑吧。另外,在Bluno Remeo介绍里面有一段『电机电源输入: 你可以从Motor Power In的接线柱端子连接线,标示“M_VIN”为电源正,当电机电源小于23V时,控制器可以和电机共用一个电源,Power In Selection 开关拨到ON;当电机电源大于23V时,Power In Selection 开关必须拨到OFF,同时控制器需要单独供电。』。如果我不希望通过USB单独给板子供电,我是否可以通过增加电压(不超过23V)或是电流的方式来使用外部电源同时给板子和电机供电?如果是,那应该是增加电压还是更换更大放电倍率的镍氢电池来提高最大电流? |
Cain 发表于 2015-6-21 13:47 好的,谢谢!等我回家了试试。 另外,商城里面的这款镍氢电池放电倍数是多少?https://www.dfrobot.com.cn/goods-374.html |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶