|
23920| 1
|
[选型&资源] 3款IMU模块的对比评测 |
NO.1 FlyMaple惯导控制器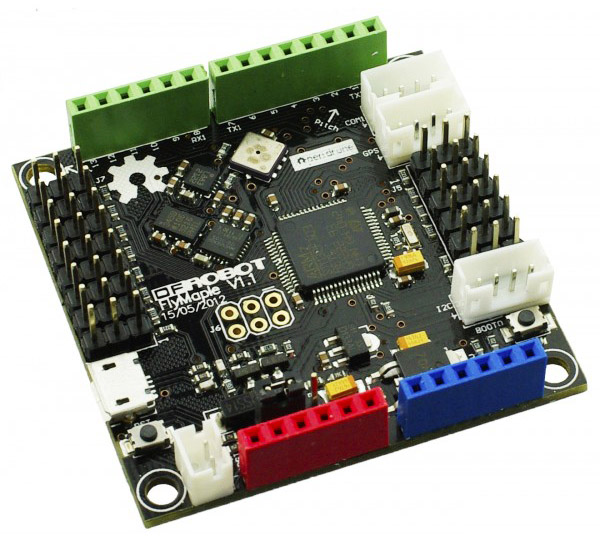 这个模块式是一个开源惯性导航控制板 ,DFRobot独立研发的10 DOF传感器,其中包含几个平时常用到的传感器:ITG-3200(三轴陀螺仪),ADXL345(三轴加速计),HMC5883L(三轴电子罗盘),BMP085(高精度数字气压计)。另外,Flymaple内置了基于STM32RET6 ARM 32位处理器的72MHz ARM Cortex M3 芯片。提供39个数字输出输入引脚,16个模拟输入端口,USB,3 USARTS,SPI/I2C ,5V DC输出和3.3V DC输出(外部电源可直接输入) ,一个重置按钮等。 Flymaple自带引导模式,它允许用户直接用USB就可以上传新的code,不用外接电路板或什么硬件,你也可以用一个外接JTAG接口直接变成微控制器。但是在把code上传到Flymaple上时,第一次用它的可能会遇到一些问题。所以,你可以到DFRobot官方产品页面去查看帮助手册。 Flymaple的数据是由Cortex-M3处理的,而且这个模块扩展了6个频段引脚去控制ESC/Servo ,8 channels GPIO 去获取RC接收器的输出数据。这样,你就可以很容易的连接你的伺服电机、ESC控制器或是无线通讯了。另外,Flymaple可以在管理机器人的运作系统同时处理复杂的运算。这是因为Flymaple的 72MHz的主频,7个频的直接存储器。所以它既是传感器,又是机器人的主控系统。 NO.2 9自由度惯导传感器 - Razor IMU - 兼容AHRS(美国原装进口) 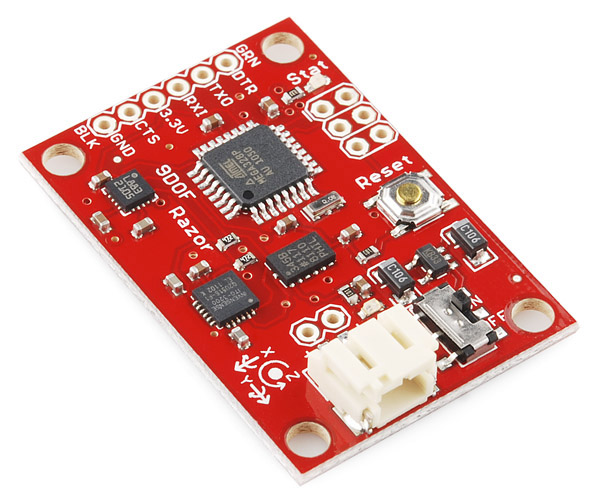 Razor IMU包含4种传感器:LY530AL(单轴陀螺仪),LPR530AL(双周陀螺仪),ADXL345(三轴加速计),HMC5883L(三轴电子罗盘)。 用8MHz ATmega328 的芯片作为处理器,也有个重置按钮。你可以把Razor IMU连接到其他控制器上来提供IMU数据。该板通过8MHZ Arduino bootloader 和样例固件编写程序,测试所有传感器的输出。可以很方便地将串行的TX和RX脚连接到一块3.3V FTDI Basic Breakout或USB Serial light适配器,将终端程序以57600bps打开,随后菜单会通过测试传感器来指导你。你可以使用Arduino IDE编写你的代码到9DOF,只要选择“Arduino Pro or Pro Mini (3.3v, 8mhz) w/ATmega328”即可。 Razor IMU可以通过 FTDI接口来编程,同时数据也可以通过 FTDI接口来传输,编程用的是DCM算法。Razor IMU用Atmega328来处理传感器的输出数据,所以芯片的资源是有限的。如果你想进行复杂的操作或是需要较快的速度,系统最好还是用其他的控制器。另外值得一提的是,Razor IMU的外形设计小巧、轻盈,适用于对重量敏感的一些应用。 NO.3 ArduPilot Mege 2.5 Fully Assembled System 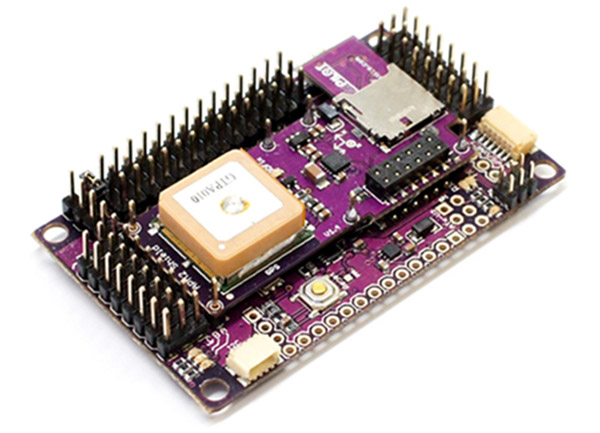 ArduPilot Mege有一个数字罗盘(HMC5883L-TR 芯片),一个GPS(MT3329模块),气压传感器(MS5611-01BA03),可以允许用户进行一些安装处理、简单的操作。它内置了两块芯片:Atmega2560,,Atmega32U-2 (类似于Arduino mega 2560的设计),支持官方Arduino IDE。 ArduPilot Mege是一款专门为那么有无需组装要求的DIY 直升机和UAV(无人机)的爱好者准备的。它与其他两者最大的区别,其内置了一个10Hz的MediaTek MT3329 GPS 和4 MP数据存储器的数据自动采集芯片。这两个功能对制作的应用非常有用,但是这样会增加控制器的成本。ArduPilot Mege也增加了一些引脚以扩展传感器,同时兼容于Arduino的特性也让其很好用。 参数对比  |
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






