|
16158| 11
|
[项目] 基于树梅派的网络监控机器人Verybot |
|
本帖最后由 verybot@163.com 于 2014-1-20 19:15 编辑 最近开发了一个基于树梅派的网络监控机器人Verybot,照片如下: 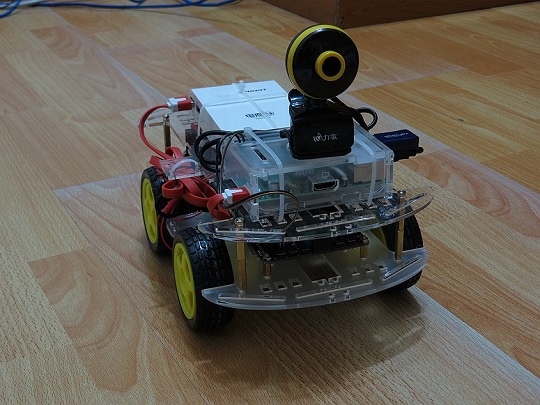 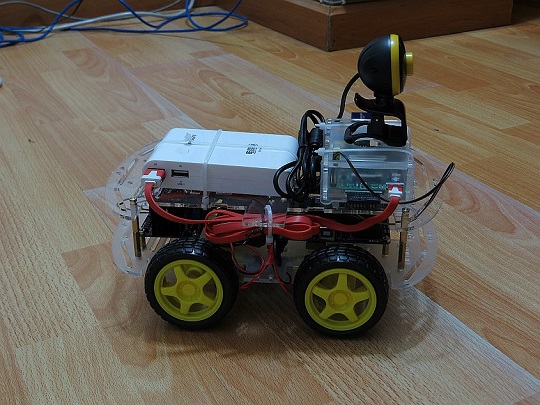 这个平台的基本组成是: 1、树梅派 ( Raspberry pi ) 嵌入式计算机; 2、USB无线网卡( wifi 无线局域网 ); 3、USB摄像头 ; 4、移动电源 ( 充电宝 ) ; 5、单片机电路板 ; 6、电机驱动电路板 ; 7、用于驱动电机的锂电池 ; 8、机器人底盘 。 目前已经验证的功能包括: 1、机器人的运动控制: 2、基于wifi的视频监控(使用PC、平板); 3、机器人的视频识别测试(基于opencv): 4、机器人跟踪色标(基于opencv) 我会在博客上不断贴出一些技术文章,博客地址: http://blog.csdn.net/u013474552/article/details/18258053 有需要这个机器人进行DIY或者研究的,可以qq联系我:1924767283 |
him 发表于 2014-2-24 09:57 http://blog.csdn.net/u013474552/article/details/18258053 博客里面有些教程,不断更新中,这两天太忙,有空继续整理! |
Jminy 发表于 2014-3-5 00:30 http://blog.csdn.net/u013474552/article/details/18258053 博客里面有些教程,不断更新中,这两天太忙,有空继续整理! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






