|
11782| 2
|
[项目] DIY三轴机械臂 |
|
本来想做能控制速度轨迹的,不过组装后发现没有精度啊。以后电机轴要用联轴器。 最后实现的是串口控制每个关节的转动角度。界面左边的是正逆解的转换,不过没用上。 感谢uarm,dobot,MeArm等等的机械设计,参考着做的。 上图: 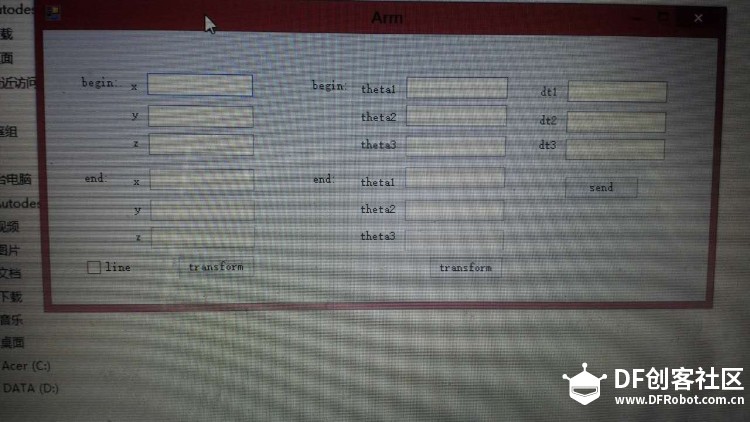 界面基本只用了右边的串口传输,C#编的。 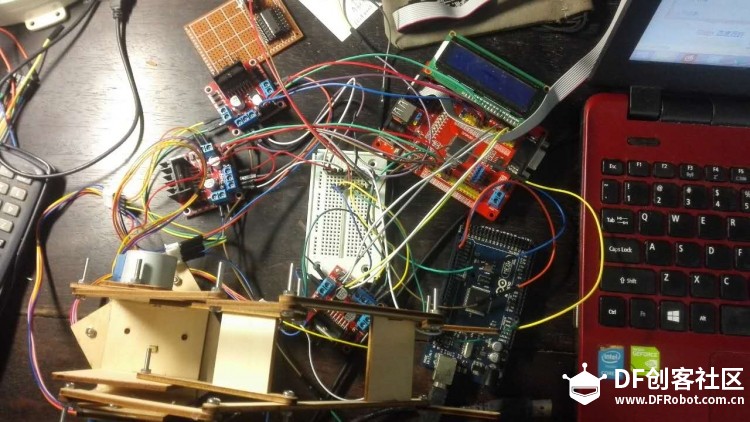 整体图 采用2线4相步进电机,贪便宜嘛。不过失步的话精度就完了,还有初始位置不好确定,力矩比舵机小,接线麻烦,这几点比不上舵机。 用avr驱动3个电机,Arduino做电脑和avr串口的”中转站“,因为板子没有usb转串口的借口。。。电流放大用的L298N。 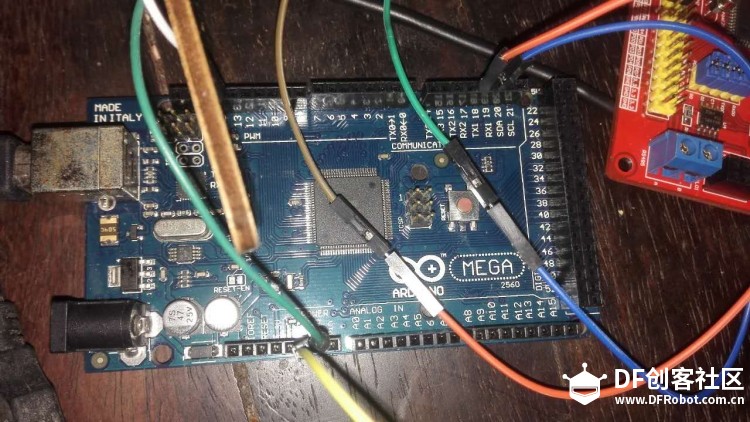 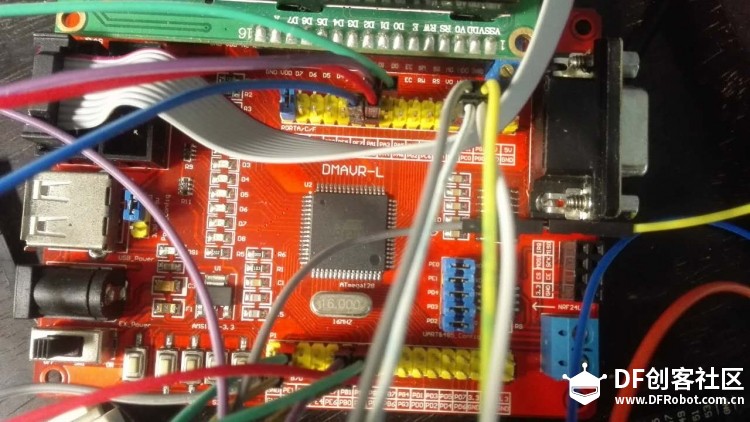 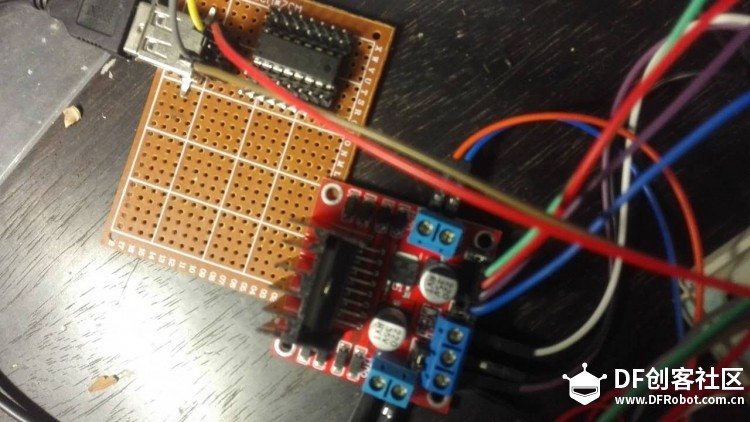 arduino串口 avr A B C[0:3]控制电机 电源(直接用手机充电器,面包板引出公共地) 机械图  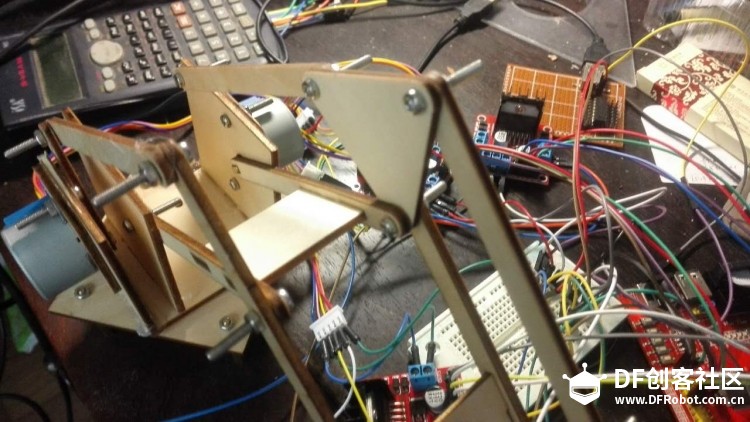 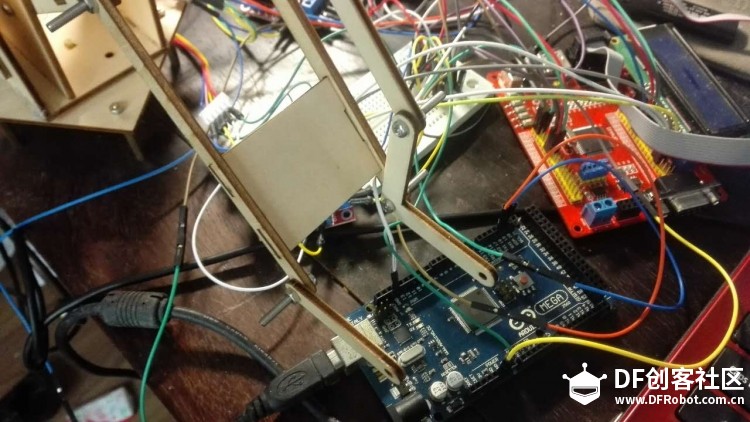 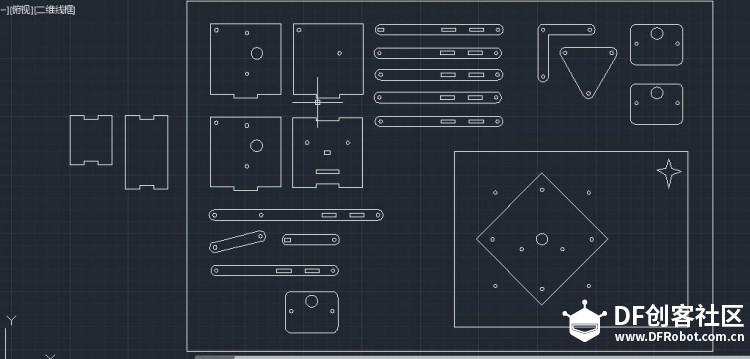 激光切割图纸 激光切割图纸四连杆机构传递力矩,这样可以吧3个电机全部放在底座上,重心稳定。 串口控制的格式为 00 【间隔时间,旋转次数】*3 ff,偷懒速度调成一样的了。 视频在审核。。。 好吧,刚发现bilibili先通过了,优酷就不管了。 有点挫,只有4s运动。脑补下电脑上的串口传输界面。 http://www.bilibili.com/video/av6890476/ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






