|
23001| 17
|
说说我折腾DFR0182无线手柄遥控乐高ev3的过程 |

|
本帖最后由 taelons 于 2016-12-8 17:07 编辑 乐高EV3的遥控一般采用红外遥控器和传感器,合计400多毛大大。EV3本身带有蓝牙(2.1版本)功能,如果使用蓝牙,就不需要安装红外传感器了。同时红外遥控器的按键操控性不如手柄方便,所以我打算找一款带蓝牙功能的可编程手柄。问度娘古哥和某宝,目前看来,dfrobot是唯一选择。等拿到dfr0182手柄,感觉比预想的大,做工相当好,不过请允许我先吐几个槽点:  1、贵!手柄加蓝牙模块508毛大大,蓝牙2.0居然卖到140毛大大,比BLE4.0的蓝牙贵了近一倍!和EV3红外比,没有优势了(当然蓝牙模块可以买第三方的,便宜一些)。另外还从dfrobot的另一家店铺买了DFR0008手柄,其实是一款带摇杆和按键的Arduino扩展板,以后再介绍。两个店铺看起来是同一个发货地址,收到两个包裹,运费免了一份; 1、贵!手柄加蓝牙模块508毛大大,蓝牙2.0居然卖到140毛大大,比BLE4.0的蓝牙贵了近一倍!和EV3红外比,没有优势了(当然蓝牙模块可以买第三方的,便宜一些)。另外还从dfrobot的另一家店铺买了DFR0008手柄,其实是一款带摇杆和按键的Arduino扩展板,以后再介绍。两个店铺看起来是同一个发货地址,收到两个包裹,运费免了一份;2、上传程序的usb转换板插上去很松,容易脱落,不知道是否由于我曾拆开手柄装蓝牙模块,导致哪里没有卡到位?原包装不带mini usb线,买手柄的亲们要自己准备一根mini usb线;3、拆开手柄安装蓝牙后,发现手柄左上和右上四个按键容易脱落,而且按键内侧的小塑料圈也容易掉落,导致按键不起作用,琢磨了一会,发现窍门是,要从里往外按,才能卡住按键,然后再合上手柄外壳; 4、手柄内部的两根黑红电池线容易断,不方便调试,后来我干脆把线拔了,等电脑上程序调试通过,再找人焊线。 未完待续 |
接下来上传DFR提供的手柄按键检测程序,arduino ide里执行无误,串口监视界面里能显示按下了哪个键。14个键连接到arduino的数字口,低电平0表示按下,从串口监视器和代码里很容易看出。接下来要确定摇杆不同位置的键值分布(姑且称之为raw值),我不懂电路,摇杆是电位器,其raw值应该是模拟的电压值转换成数字值。为方便辨识,将程序中的延迟加大,经多次运行代码,记录如下摇杆raw值分布: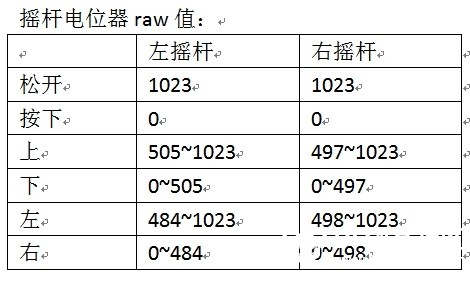 由于乐高EV3使用特有的蓝牙数据包格式,为方便在蓝牙主从两端的程序中处理,我将17个按键按1-17编号,发送给EV3,EV3解包后,根据收到的数字,在EV3程序中做相应的处理,如前进后退转向加减速等等。数据包格式如下图:  在arduino里,如何发送蓝牙数据包给EV3呢?请看下面程序片断,修改了DFR的按键检测程序: EV3程序里,用一个循环加一个名称为a,读取数字的mailbox块,就可以得到arduino发来的蓝牙按键对应的数字了。当然,事先要在EV3液晶屏里进行蓝牙配对,或程序里配对,应该能看到一个名为“bluetooth_xbee“的设备,就是手柄里的蓝牙模块了。 未完待续。。。。。。 |
|
上面的程序是单个键的蓝牙数据发送,这里不需要考虑组合按键,因为手柄的17个键足够分配不同功能了,四个按键就可以完成前进后退左右转向,要玩些花哨功能,如原地打转或漂移等,手柄左上右上四个按键很适合,组合按键徒增操控和编码的复杂度。接下来是摇杆功能的设计,一个摇杆就能完成所有常用功能。此时要向EV3发送坐标值XY。按上面的raw值分布表,Y值代表速度,介意0-1023之间,0代表后退最高速度,在EV3里对应马达功率-100,1023是前进最高速度,在EV3里对应+100。很简单,EV3只需将收到的raw值转换成-100到+100就可以了。 同样,坐标X值代表转向,0-1023对应乐高转向功率-100到+100,偏离0功率越大,转向越急: 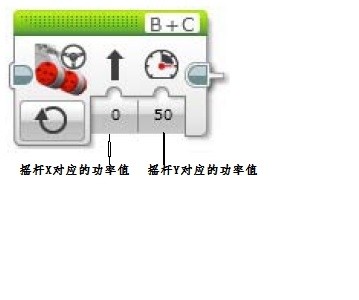 由于XY是动态值,无法按前面17个按键那样分配固定的值,需要在arduino里用union类型,把XY值转换成32位浮点数: 把XY坐标值赋给x.f、y.f,这样就可以得到坐标值的XY值对应的32位浮点数x.c、y.c,再按二楼的方式拼装一个16进制字符数组,将16进制字符数组发送到EV3上不同名称的mailbox程序块,比如将X坐标的16进制字符数组,发送到EV3中名称为x的mailbox,将Y坐标的16进制字符数组,发送到EV3中名称为y的mailbox。蓝牙数据包中,以x078、0x79代替上面的0x61。EV3收到XY坐标后,分别转换成转向功率和速度功率。 注意由于摇杆XY值分布不均匀,中间值并非1023/2,需要在EV3程序里分两段进行raw值到功率的转换。 未完待续。。。。。。 |
我的EV3 usb口貌似有故障,暂时不能调试程序,摇杆的程序先贴出来。然后在EV3上测试是否能收到摇杆值: 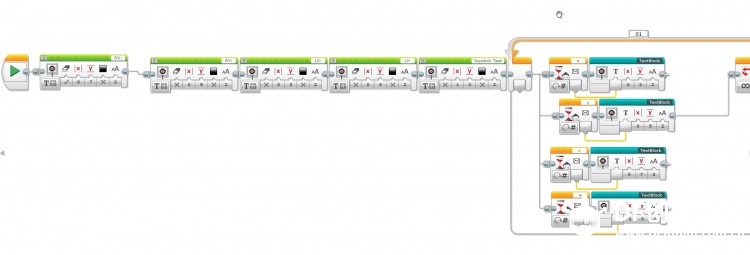 运行后,在EV3液晶屏上显示左右摇杆数据: LX:484 LY:505 RX:498 RY:497 拨动摇杆,显示随之变化。 未完待续。。。。。。。 |
|
经过以上几步,EV3已能通过蓝牙接收手柄按键和摇杆数据,剩下的事情就简单了,在LEGO MINDSTORMS EV3 Home Edition中用程序块拖放编程,这里就不打算说了。 开头提到还入手了一块便宜DFR0008手柄,带四个按建和一个摇杆,足够用了,arduino程序相对简单,我就不重复了,只贴一张靓照。 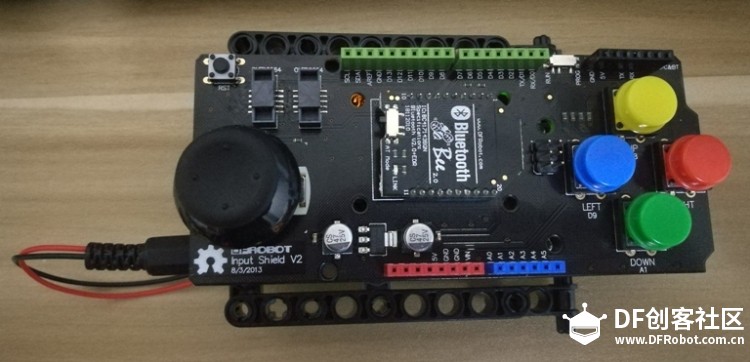 手柄插上蓝牙模块,再插在arduino上,arduino固定在乐高搭成的支架里,下面绑一块电池供电,非常牢固。 如果能找一个便宜的xbee 2.0蓝牙模块,全部加起来不超过200元,便宜实惠。:lol 等有时间再上传操控乐高EV3小车的视频。 接下来准备加一个红外模块,用手柄遥控乐高PF马达 :lol |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







