|
103237| 26
|
[入门教程] Arduino教程10 舵机初动「DFR0100 」 |
|
【本篇课程内容于 2024年11月14日更新】 >本系教程配套硬件套件:【新版】Arduino入门套件 DFR0100 本项目要接触到舵机。舵机是一种电机,通过反馈系统来控制其位置,从而能够精确地掌握电机的角度。大多数舵机最大旋转角度是180°。也有一些能转到270°,甚至360°。舵机常被用于对角度有精确要求的场合,如摄像头、智能小车的前置探测器,以及需要在特定范围内进行监测的移动平台。又或者把舵机放到玩具,让玩具动起来。还可以用多个舵机,做个小型机器人,舵机就可以作为机器人的关节部分。所以,舵机的用处很多。 Arduino也提供了<Servo.h>库,让我们使用舵机变得更方便了。 先从简单程序入手,套件这个9G小舵机是180°的,我们就让它在0~180°之间来回转动。 元件清单  硬件连接 这个项目的连线很简单,只需按图1所示连接舵机三根线就可以了,连的时候注意线序,舵机引出三根线。一根是红色,连到+5V上。一根棕色(有些是黑的),连到GND。还有一根是黄色或者橘色,连到数字引脚9。 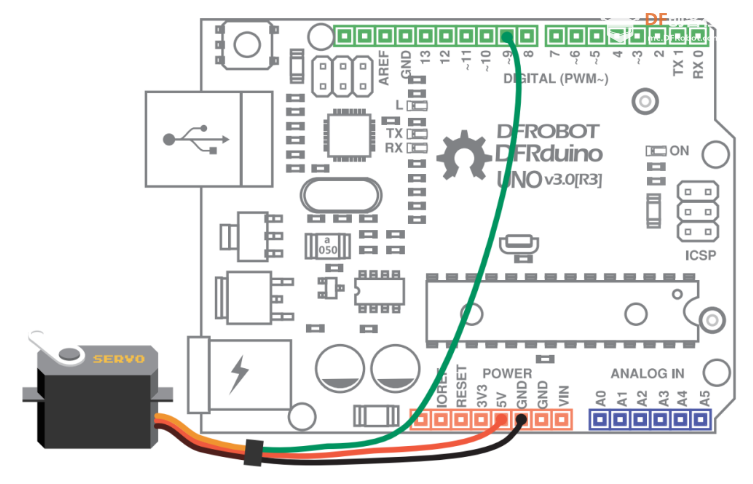 图 1 舵机初动连线图 代码示例 样例代码: 下载代码,下载成功后我们可以看到舵机0~180°来回转动。 代码回顾 代码的开头首先调用了<Servo.h>库 #include <Servo.h> 这个库已经在Arduino IDE中了,可以打开Arduino-1.0.5/ libraries/Servo/ Servo.h,这就是Servo库所在位置。 我们怎么理解库呢?和我们前面讲到的函数意义是差不多的。函数通常按一个个功能来划分的,就像一个个小的储物柜,函数名好比储物柜标签名。我们使用的时候,直接看标签就好了,方便我们使用。那库是什么呢?库则是把多个函数封装打包起来,好比大的储物柜,里面含有一个个小的储物柜。不知道这样说,你是不是能理解库和函数的关系? 同样,大储物柜也需要一个标签,这标签的学术名叫做“对象”。所以这里叫创建一个对象。就是我们接下来的这句语句: Servo myservo; setup()函数中有一条语句: myservo.attach(9); 这里就开始调用Servo库中的函数了,和我们以前函数调用有点区别。这里,我们需要先指明这是哪个库中的函数。所以,先指出对象名,再指出函数名。每次要用到储物柜的东西就要先指明这个标签。这样程序才知道要去哪里找东西。库函数调用格式如下: 对象名.函数名(); 不要忘了中间的“.”!myservo是我们前面设的标签(对象),然后调用的函数是:  attach(pin)函数有一个传递参数——pin,任意一个数字引脚(不建议使用数字0,1)。我们这里选择数字引脚9。 进入主函数,有两个for循环,第一段是从0开始,循环到180,每次增加1度。第二个for循环则是从180开始,每次减小1度,一直减到0。再回到上面那个循环中…… for循环中又调用了一个Servo库中的函数write(pos),变量pos用来存放角度值。我们可以不用管函数内部复杂的程序,只要先会使用就可以了。 myservo.write(pos); 和上面那个函数调用一样,先要指明是哪个库。该函数的功能是将舵机转动到对应的角度,传递参数就是角度,单位为°。 如果还想了解Servo库中还有哪些好用的函数的话,可以参看下面的网址,里面会有相关介绍的。 Servo库: http://arduino.cc/en/reference/servo 我们无需深入了解函数内部的复杂逻辑,只需学会如何正确使用即可。如果还想了解更多的话,可以借助我们的网络资源。 DF创客社区: www.dfrobot.com.cn 示例代码  Moving_a_Servo_Chinese.rar Moving_a_Servo_Chinese.rar下一篇教程:Arduino教程 11 -- 可控舵机 DFRobot版权所有,欢迎转载。 转载请务必标注来源: DF创客社区+作者姓名+原文网址。 |
| 在之后的Arduino学习之旅中,不管你遇到奇奇怪怪的问题,都希望你与我们交流,欢迎登陆我们的DFRobot创客社区! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 版主限定
版主限定
 牛X认证
牛X认证
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师






