|
4855| 0
|
江阴4组+兔子精灵 |
|
本帖最后由 honker100 于 2017-7-5 13:54 编辑 这次DFrobot集训活动,有幸参与到其中,和几位有经验的老师成立了“蘑菇特工队”,一起制作了这个“兔子精灵”送给我们的学生。 首先送上我们的成品图: 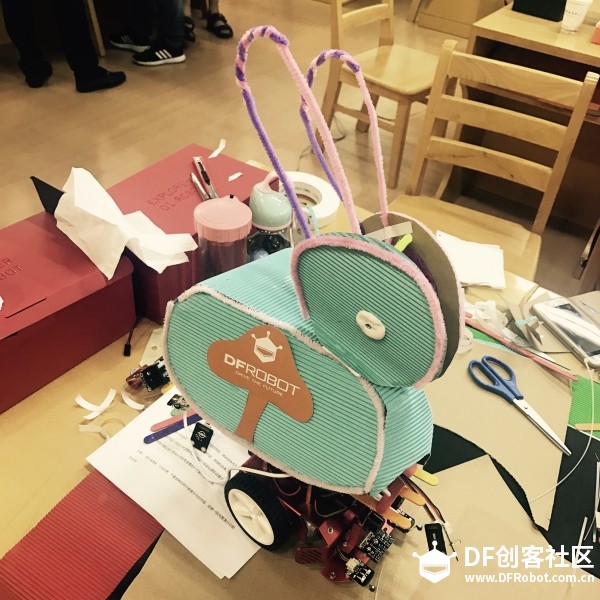   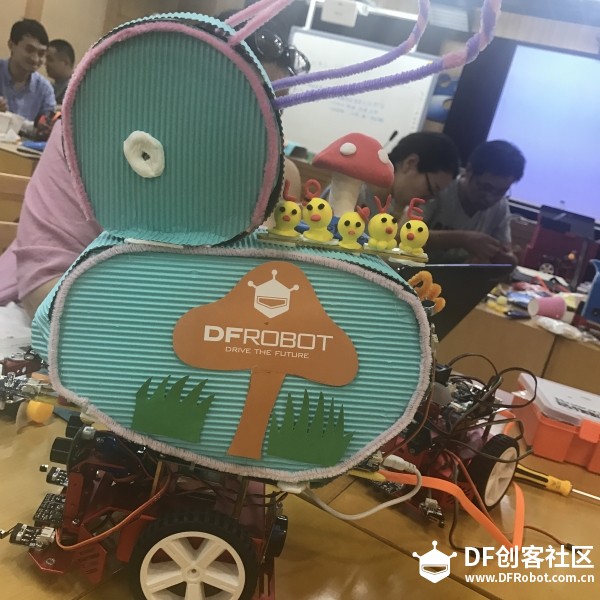 这个作品的主要功能是利用一个声音传感器,当周围有任何风吹草动,就会发生警报蜂鸣声,并伴有报警灯光,可以用来看护一些重要的物件,当我们把兔子背后的环境光传感器遮住的时候,该装置就会停止鸣叫,重新进入工作状态。 首先,我们制作了这个兔子精灵, 用到的材料清单有: 造物粒子套装:声音传感器*1,环境光传感器*1,阀值模块*2,蜂鸣器模块*1,逻辑“与”模块*1,逻辑“或”模块*1,分支模块*3,Led小灯红*1,Led小灯蓝*1,电路主板*1 D1小车套件 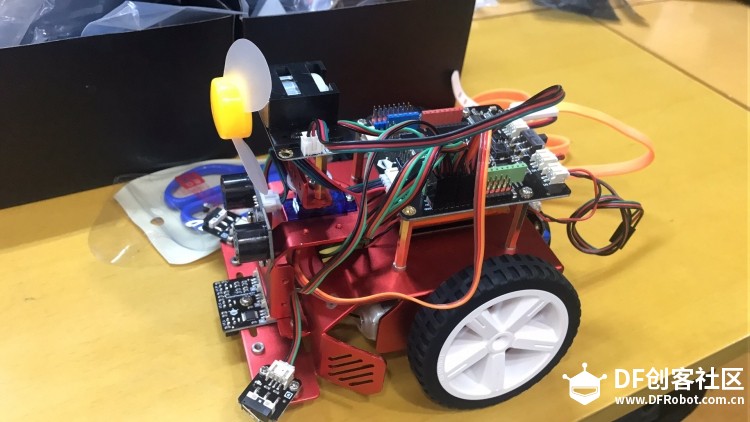 其次我们设计了兔子精灵的电路 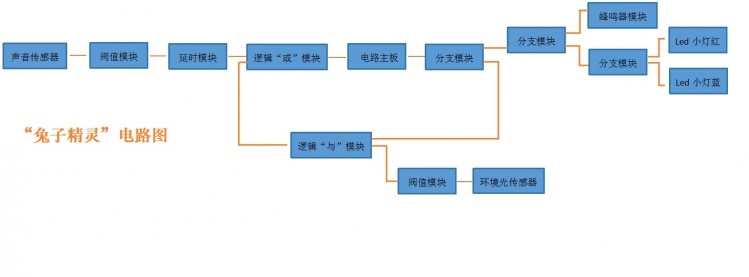 之后我们用彩纸等工具制作了兔子的外观     这样我们的作品“兔子精灵”就顺利完成啦! 测试视频地址:https://imgcache.qq.com/tencentvideo_v1/playerv3/TPout.swf?max_age=86400&v=20161117&vid=d0522vyu4uz&auto=0 代码如下: void setRomeoMotor(int motorId, int speed) { int speedPin, directionPin; if (motorId == 1) { speedPin = 6; directionPin = 7; } else { if (motorId == 2) { speedPin = 5; directionPin = 4; } else { return; } } if (speed == 0) { digitalWrite(speedPin, LOW); } if (speed > 0) { digitalWrite(directionPin, HIGH); analogWrite(speedPin, speed); } else { digitalWrite(directionPin, LOW); analogWrite(speedPin, -speed); } } void setup() { pinMode( 7 , OUTPUT); pinMode( 6 , OUTPUT); pinMode( 5 , OUTPUT); pinMode( 4 , OUTPUT); digitalWrite(4, LOW); digitalWrite(5, LOW); digitalWrite(6, LOW); digitalWrite(7, LOW); } void loop() { setRomeoMotor(1, 100); setRomeoMotor(2, 100); delay( 2000 ); setRomeoMotor(1, -100); setRomeoMotor(2, -100); delay( 2000 ); setRomeoMotor(1, 100); setRomeoMotor(2, 200); delay( 1000 ); setRomeoMotor(1, 100); setRomeoMotor(2, 100); delay( 2000 ); setRomeoMotor(1, 200); setRomeoMotor(2, 100); delay( 1000 ); setRomeoMotor(1, 100); setRomeC:\Users\honker\Desktop\集训活动图片素材oMotor(2, 100); delay( 2000 ); setRomeoMotor(1, 0); setRomeoMotor(2, 0); delay( 5000 ); } |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶









