|
7300| 1
|
[项目教程] 第二轮挑战作品:利用大气压原理的物联网浇花机器人 |
|
本帖最后由 闪闪的红星 于 2018-8-19 14:15 编辑 *【标题】利用大气压原理的物联网浇花机器人 *【介绍】介绍来说明项目的主要内容和实现功能,以及解决的问题和意义。 先看完整视频演示和介绍: 1、为了争取“行走的百科全书”这个标签的20分,苦苦思考了很多时间,最后决定利用瓶子内外大气压力差这种非常规物理现象的办法来实现与众不同的浇花功能。 2、同时为了让作品更炫酷,巧妙利用隐藏在底座中的灯带让整个瓶子瞬即变成灯柱(这里其实是利用了光的全反射原理实现整个瓶子发光),既可以当做一个室内光源来用,同时在自动浇花时整个瓶身还会呼闪呼闪的。 3、当然做为参加micro:bit × OBLOQ挑战赛,物连网的功能是绝不会少的,本作品可以远程收集土壤温度和环境温度,然后主人根据这两个数据远程控制机器人浇花。 为了解悉情况原理,首先看一下整个结构:  正面  背面 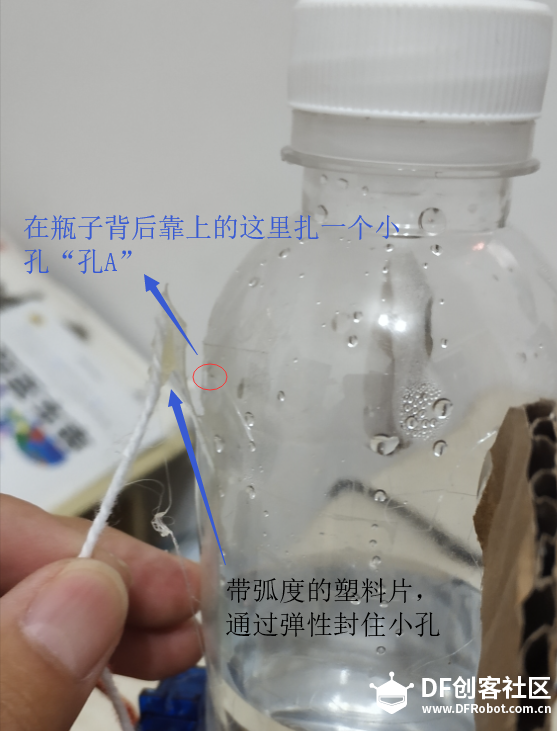 关键局部 相关科学原理解释: 1:为了叙述方便,我们把瓶身背后靠上面位置的小孔称为“A孔”,象鼻子出水孔称为“B孔”。 当瓶盖盖紧、A孔处密封后,瓶子内水从B孔处往外流的过程会造成瓶内空气压力变小(因为瓶内空气数量不变,但水位下降造成空气所处空间变大),此时本来应该往外流的水,因为瓶内压力变小,而瓶外大气压不变,瓶外大气压会给出水孔一个向内的压力,阻止水流出来,最后会在出水孔处形成一个压力平衡,造成水能流出的奇特现象。 当舵机通过棉线把堵住A孔的塑料片往外拉开后,瓶内外大气压力变成一样的,加上水因为重力原因,打破B孔处的压力平衡而不断流出水。  *【准备事项】列出项目使用到的硬件、材料、工具以及软件平台 micro:bit×1 扩展板×1 OBLOQ物联网模块×1 土壤温度传感器×1 9g舵机×1 灯带×1 矿泉水瓶×1 橡胶管×1 纸板×1 水彩笔×1 棉线×1 胶枪×1 剪刀×1 *【制作过程】分步骤,将复杂的制作过程,拆解成简单步骤 整个造型类似一只小象,本来可以更形象一点的,但时间有限只能简单处理了,各位可以自由发挥。  首先在矿泉水瓶四分之一左右高度处打一个小孔,然后把橡胶管用热熔胶粘在这个小孔上面,作为小象的鼻子,最后瓶子里的水会从这个鼻子里留出来,所以要小心热熔胶不要把孔堵了。 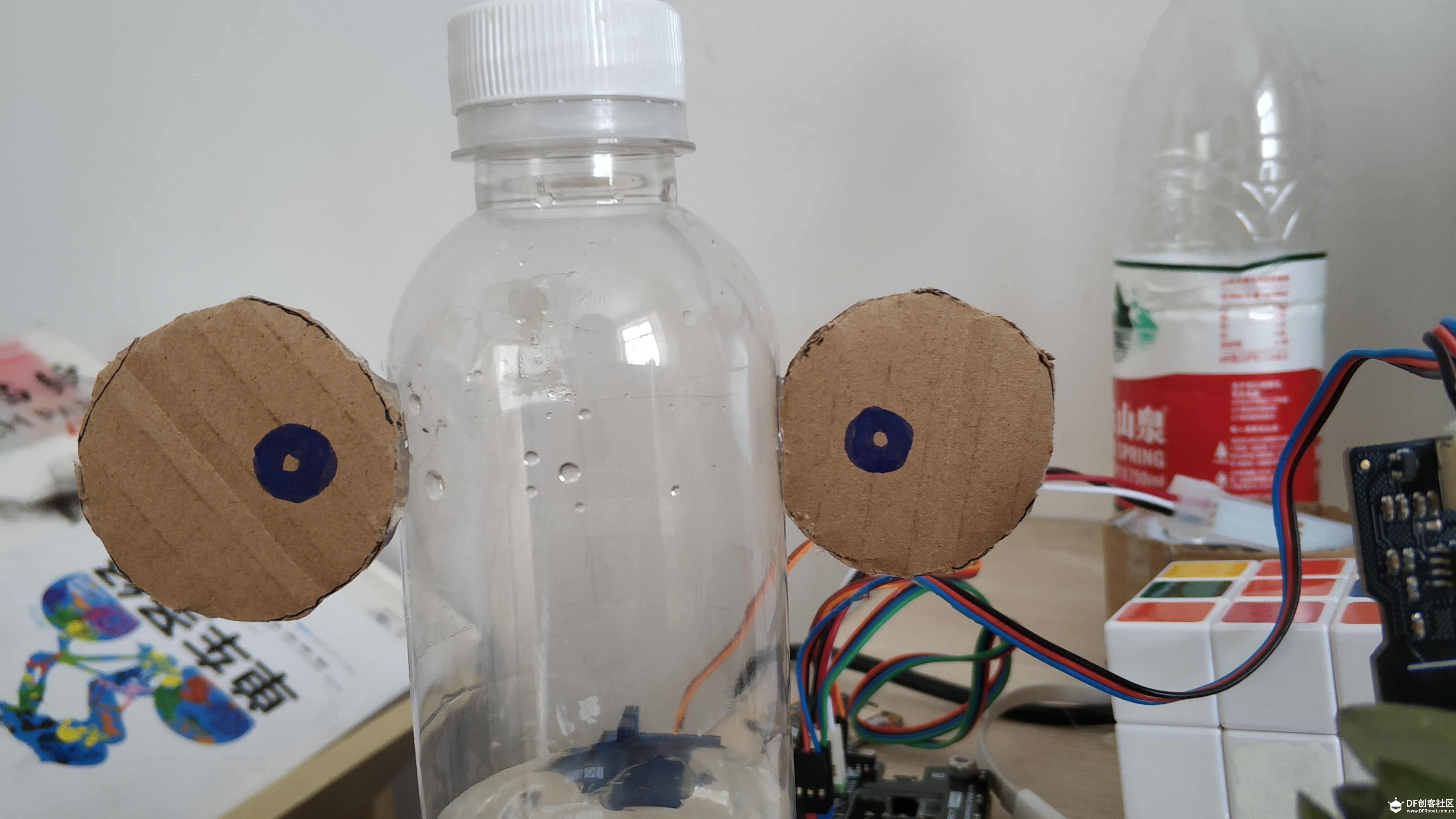 用水彩笔和纸板做一对小象的眼睛,并用胶粘到瓶子两则。 在瓶子背后靠上部分用针打一个小小的孔。注意孔越小越好,它只起到在特定时刻让瓶子内外空气导通的作用,如果孔大了最后有可能不能完全堵住孔造成水止不住的往外流。 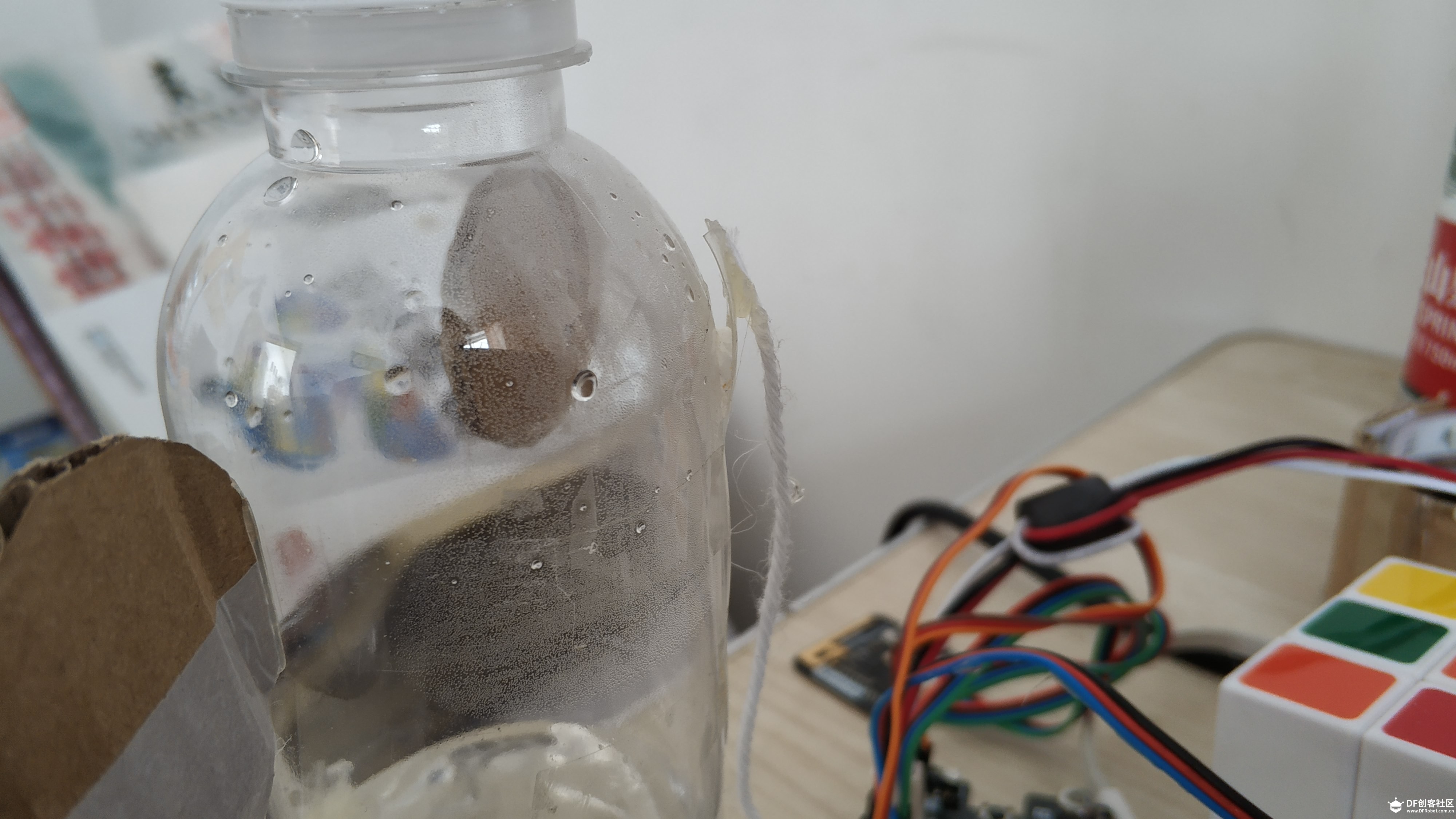 在另一个不要的瓶子上,找一段有弧度的部分,剪下一个长条,并在这个有弹性的塑料条一头粘一个小小的泡沫颗粒,然后用玻璃胶带把这个塑料条粘在瓶子上,让小泡沫颗粒正好压在刚才瓶身上的小孔上。这一步非常重要,也是整个作品最难的部分,需要我们小心仔细的操作,必须保证泡沫颗粒正好能压在小孔上,并且利用带弧度的塑料片的弹性把孔堵住。 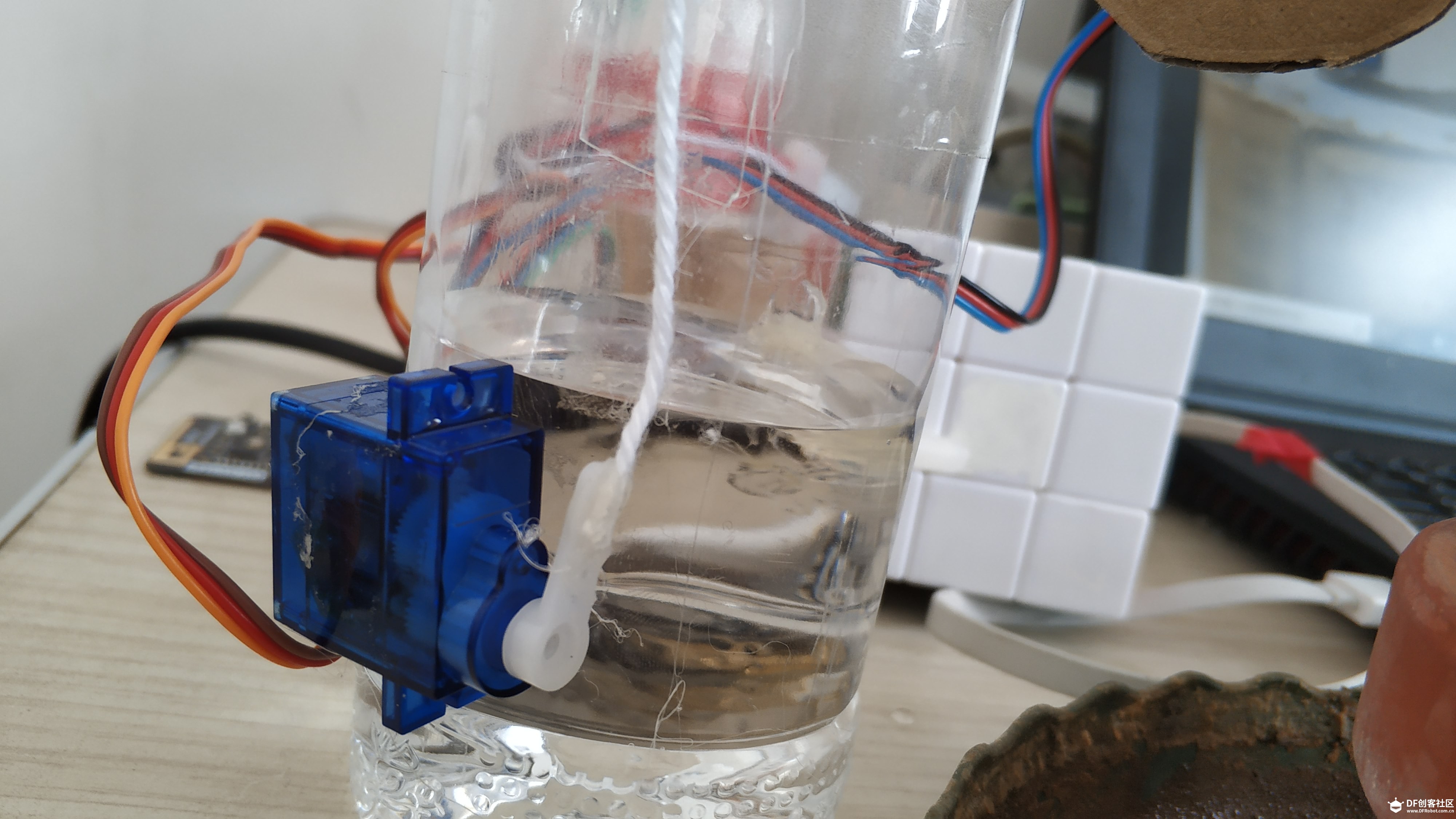 在瓶子背靠下的地方用胶把小舵机粘上,提前调整好舵机角度,并找根棉线把舵机臂和上面的塑料片顶部连上。目的是利用舵机的拉力,在需要时把堵住小孔的塑料片稍微拉开一点,让瓶子内外空气导通。  用纸板做一个瓶子的底座,并把灯带如图所示放到底座里,让灯带的一部分缠绕在瓶子底部,但又不会露出底座。 接线图: P0:土壤传感器 P1、P2:物连网模块信息进出线(绿线P1、蓝线P2) P8: 接灯带 P12的正负极接物连网模块的正负极,物连网模块必须用扩展板单独用3V供电。 P16: 接小舵机 好了,几乎所有扩展板的接线口都用完了。 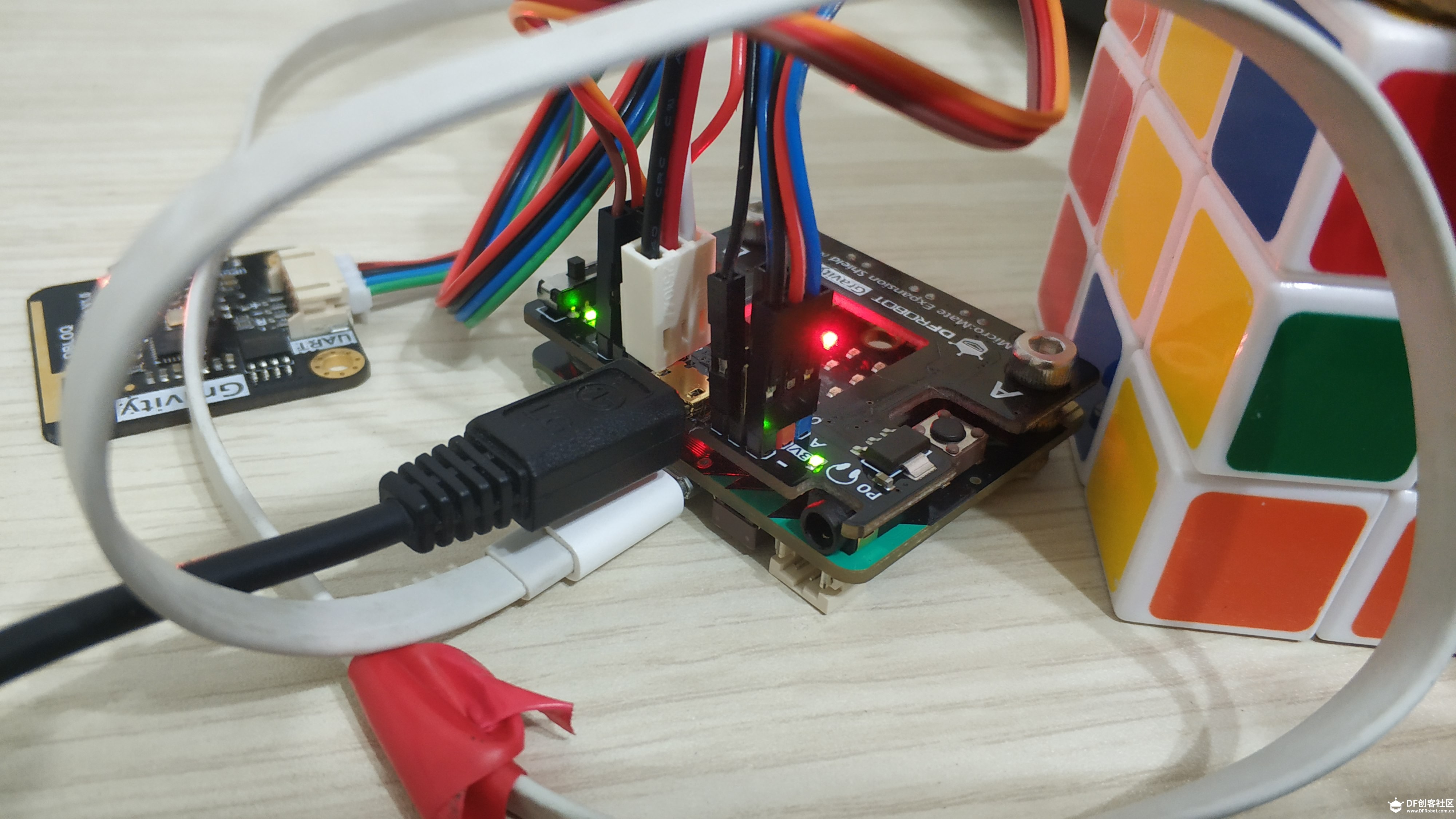 编程软件部分: 进入https://makecode.microbit.org/----高级---添加软件包 首先添加灯带的扩展包neopixel,这个不用搜索,直接双击选择添加就可以了。 然后我们添加物连网模块的扩展包:----高级---添加软件包--输入网址https://github.com/DFRobot/pxt-Obloq---添加OBLOQ软件包 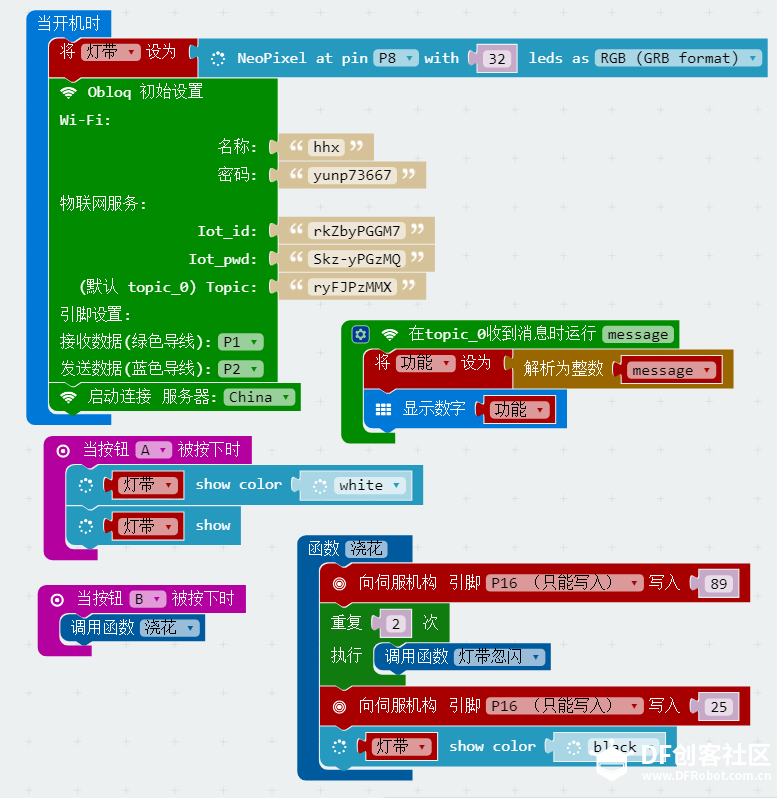 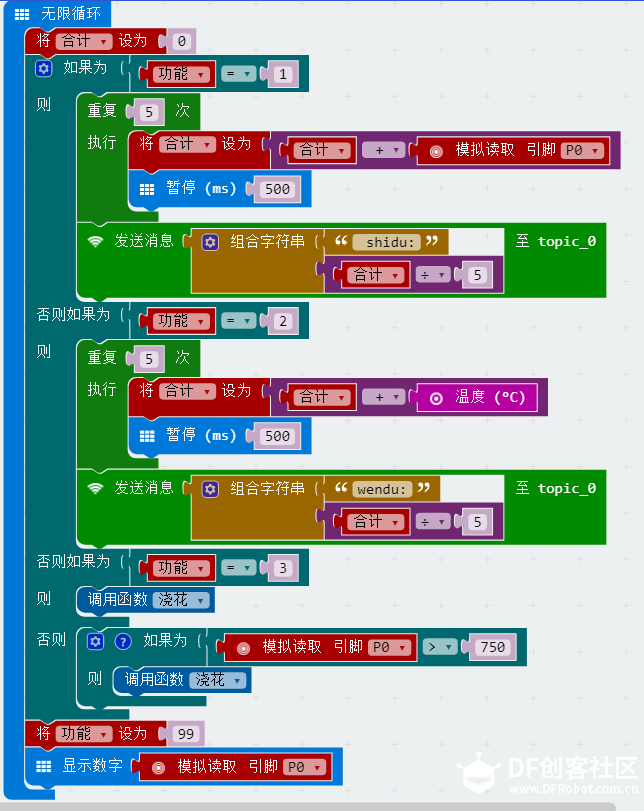 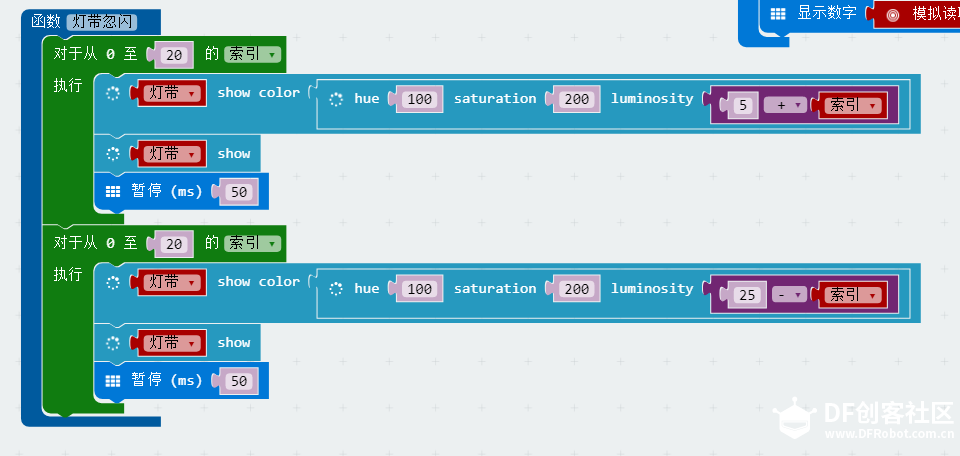 比较贪心,同时申请以下标签:lol: # 行走的百科全书:强调知识点涵盖 利用大气压力的原理、光线的全反射现象。 # 偏偏喜欢神操作:强调趣味性 把已经被人做了无数次的浇花,用新的方式进行演绎。 # 科技解放生产力:强调功能性 浇花功能完整,有物联网功能 # 步步精心好教程:强调文档可参考性 这个只能说我尽力了,时间有限。但还是觉得提供的信息已经足够大家复制实验了。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






