|
15798| 6
|
[项目] 无线蓝牙机械手 |
|
本帖最后由 hnyzcj 于 2019-1-20 14:32 编辑 无线蓝牙机械臂效果展示:   安装过程: 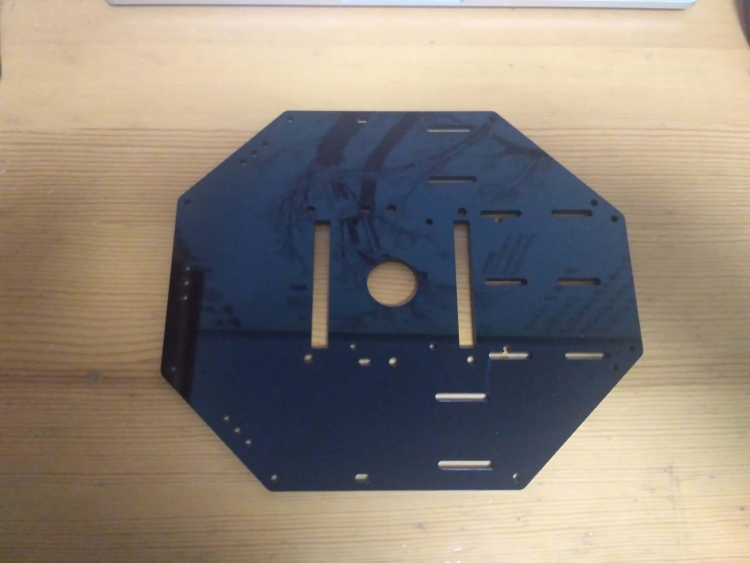 拿出底板  安装支撑螺丝 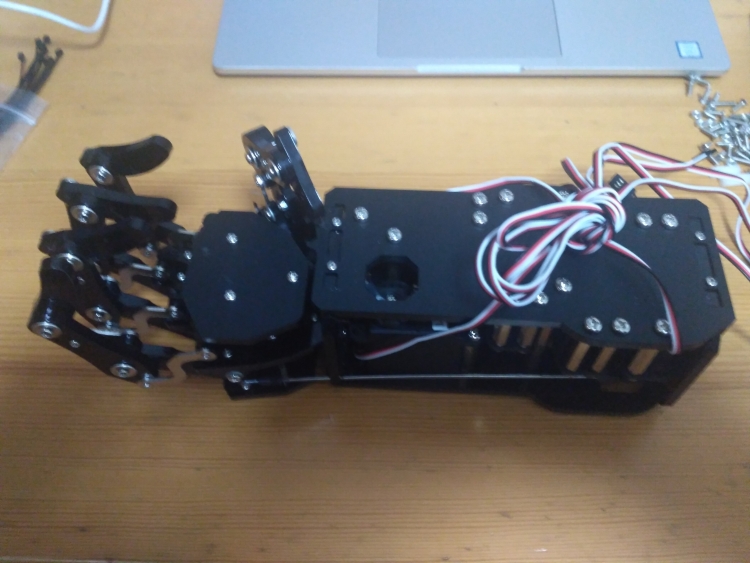 取出机械手臂  将手臂固定再底板上 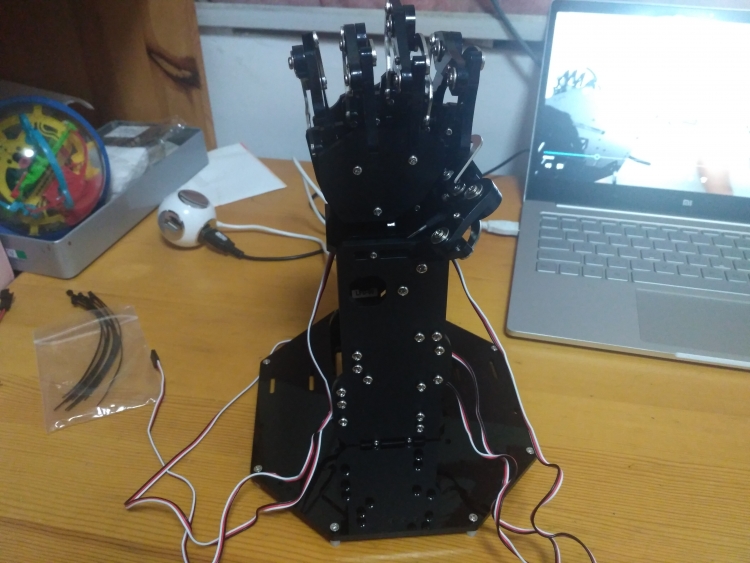 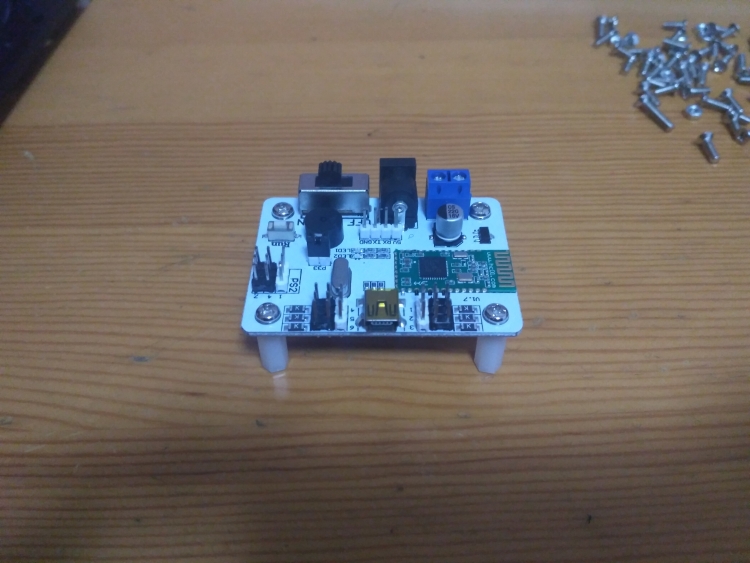 给舵机驱动板加装支撑螺丝 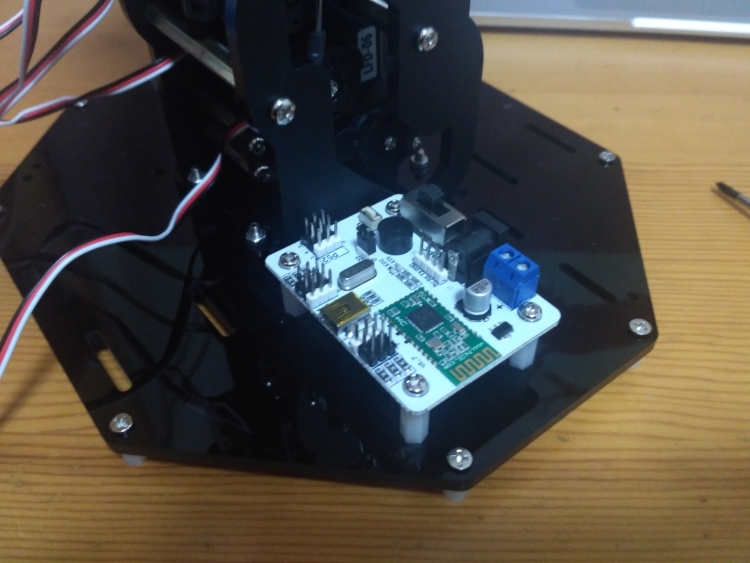 将舵机驱动板固定在底板上  安装电池 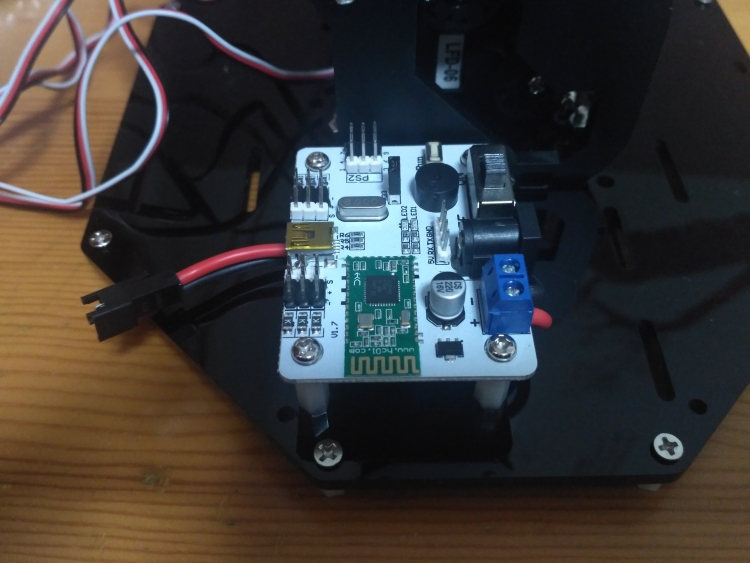 从舵机驱动板上引出电池接线  将电池用扎带固定在底板上  将手臂上的舵机线分别对应接在信号口1,2,3,4,5——大拇指到小指顺序 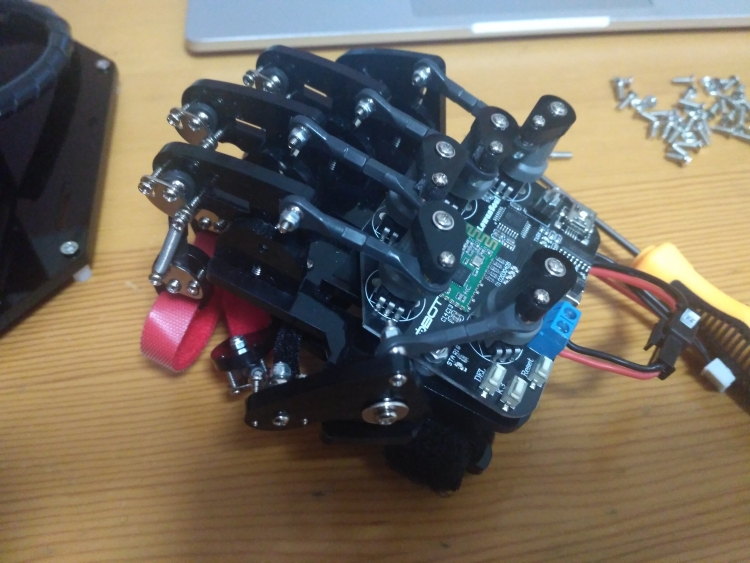 将手套的电池电源接上。  进行蓝牙配对 1. 手套佩戴标准,使得上面的电位器可以得到最大程度的运转,以免后面因为操作不灵敏出现控制上面的问题。 2. 蓝牙连接:打开机器人的电源开关,按一下手套上的 DEL 键(清楚之前蓝牙连接记录) ,STA 灯常亮表示连接上。 3. 手套初始化:将手臂伸直紧握拳头,拳心竖直向下,打开电源,中间的一排 LED 会快速闪烁几次,闪烁过后,将手尽力伸展开,LED 再次闪烁完毕,初始化完成 4. K3按键切换工作模式: LED 灯亮1个控制手掌 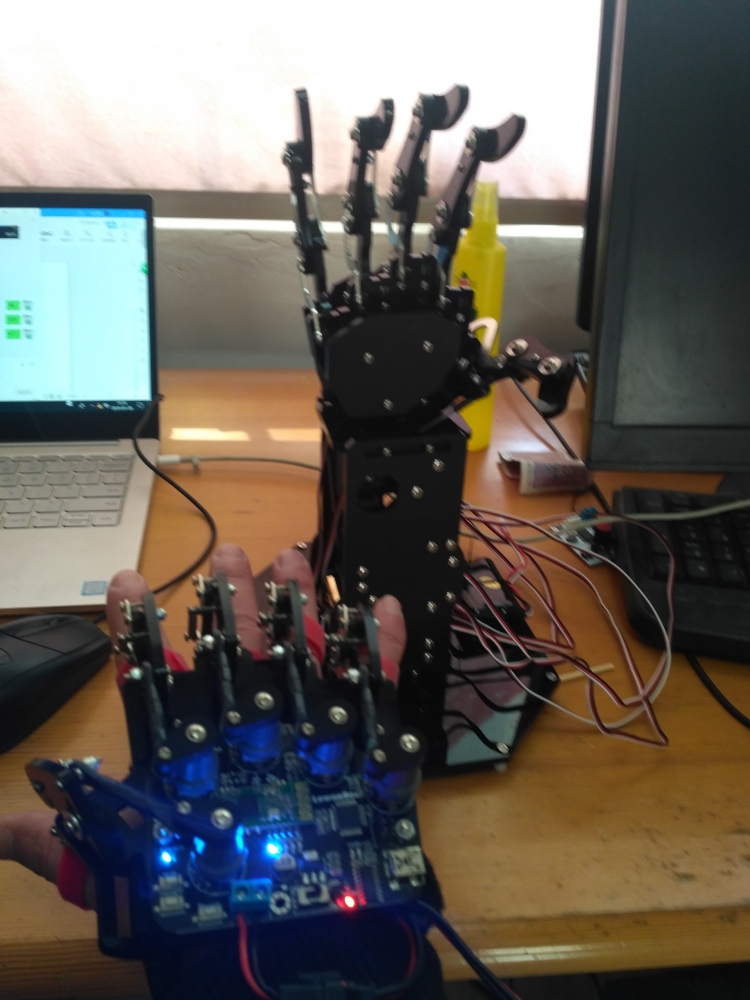 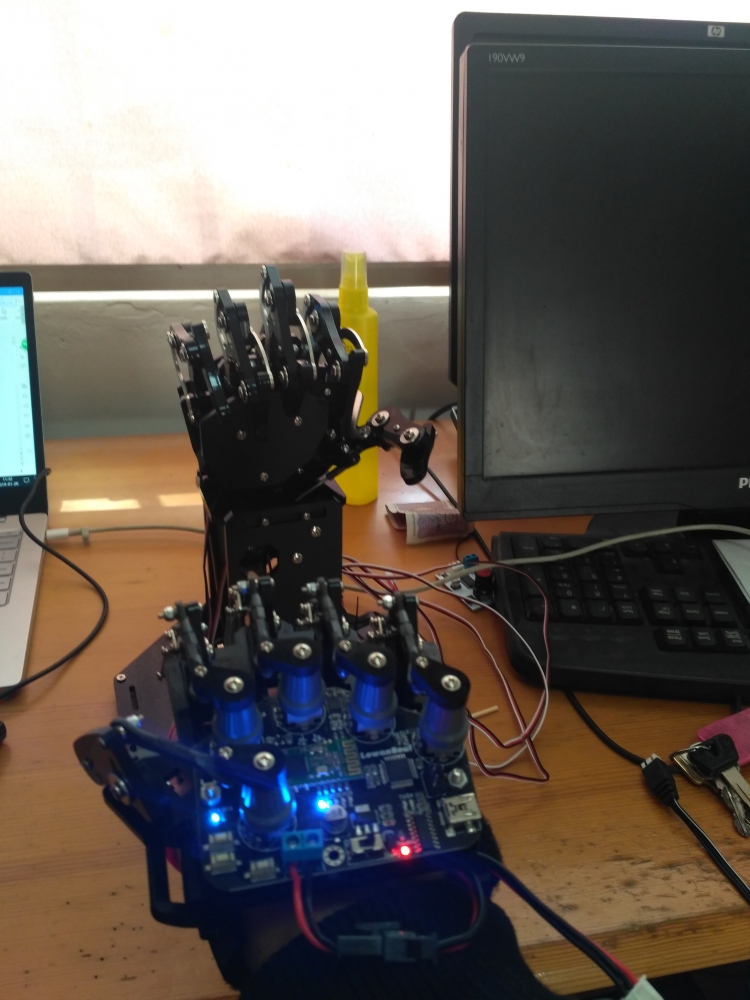 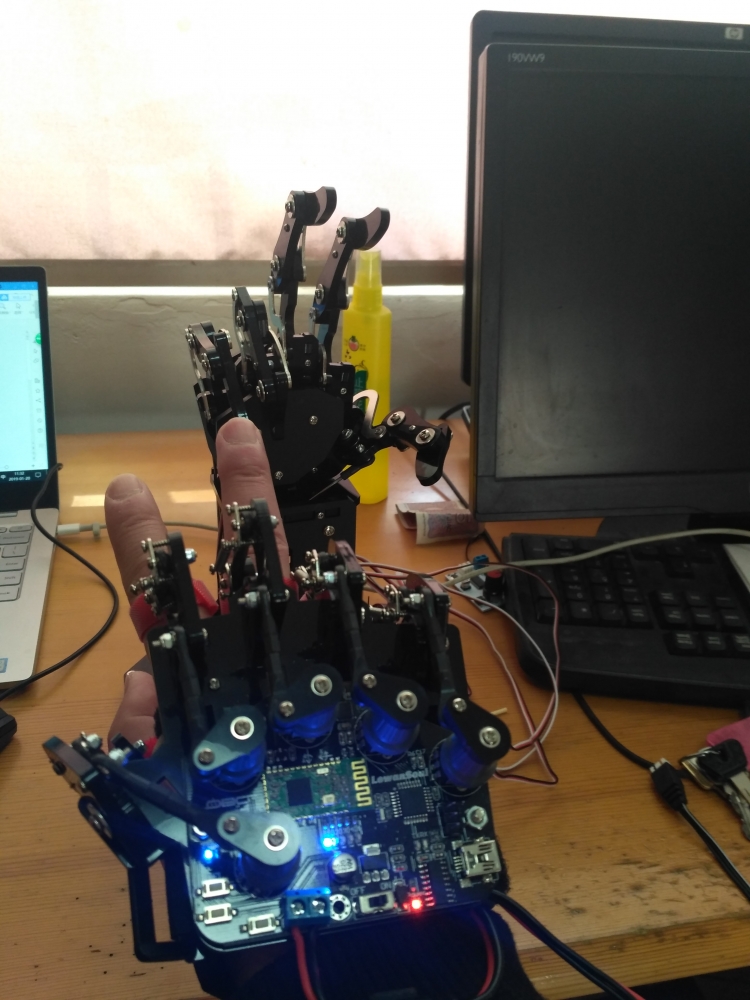 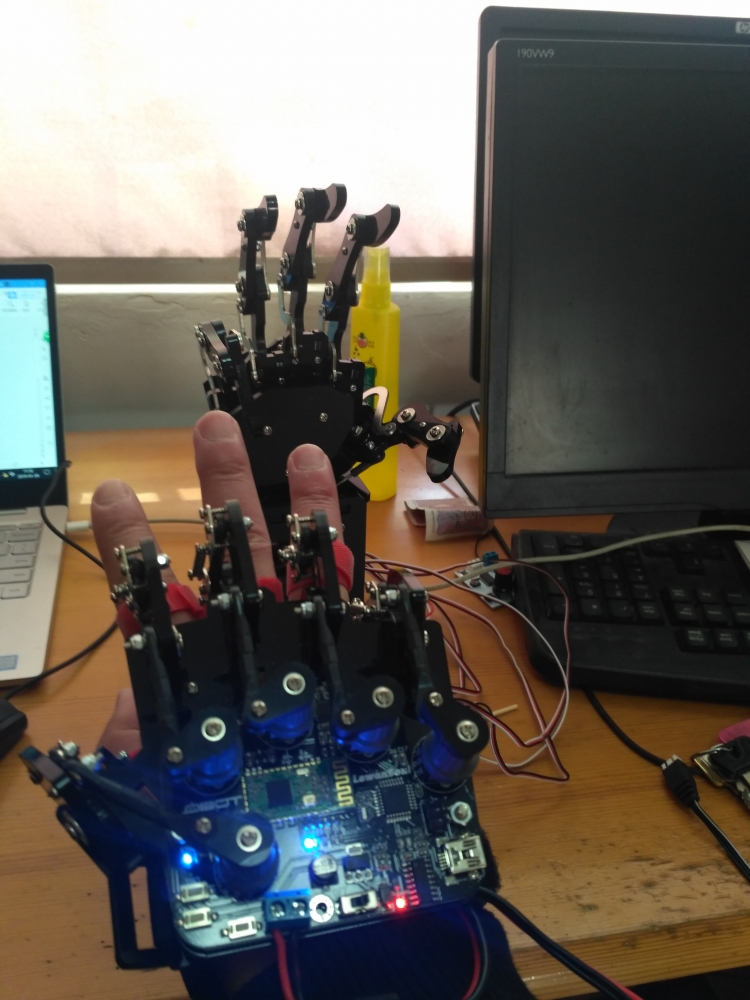 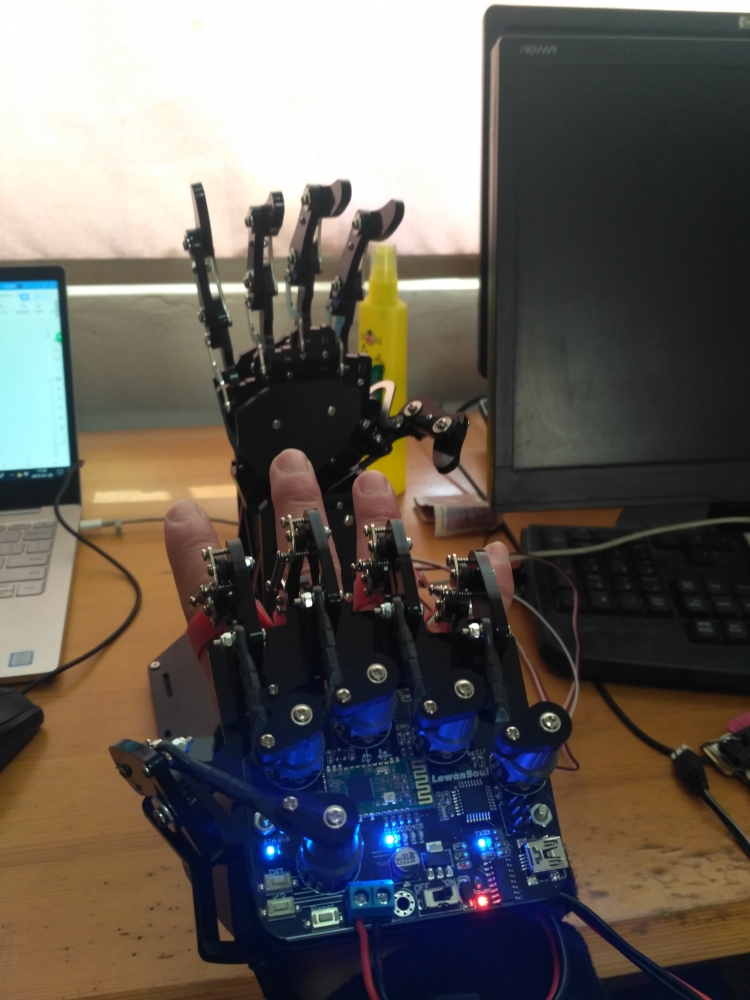   |
这个基础教程真的是很“基础”的“教程”呢。。。。UP主的机械手是自己做的吗?打算开源吗?如果是买的,能不能透露一下购买渠道? |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






