|
3866| 3
|
遥控探测 |

|
本帖最后由 hnyzcj 于 2019-9-12 16:43 编辑 麦昆太空队探测到了一颗新行星,要对其地表进行地质探测。太空队决定采用总部无线遥控发送指令,麦昆接收到指令后按指令行走并将识别的地表颜色通过车身自带的RGBLED显示出来。请你帮助麦昆实现遥控探测……  【任务导航】 1.了解无线通讯技术,认识2.4G无线通讯 2.认识颜色识别传感器,掌握颜色传感器的使用 3.使用2.4G无线通讯完成麦昆遥控 【作品器材】 1.麦昆机器人 2.遥控手柄 【材料学习】 1.无线通讯技术 无线通讯是利用电磁波信号可以在自由空间中传播的特性,进行信息交换的一种通信方式。近些年信息通信领域中,发展最快、应用最广的就是无线通讯技术。而频段处于2.400GHz~2.4835GHz之间的无线信号,所以简称2.4G无线技术。市面上三大主要无线技术(包括Bluetooth、27M、2.4G)之一。2.4G无线技术在生活中有广泛的应用,下图9-2为无线遥控的LED。  2.颜色识别传感器 TCS34725是一款低成本,高性价比的RGB全彩颜色识别传感器,传感器通过光学感应来识别物体的表面颜色。支持红、绿、蓝(RGB)三基色,支持明光感应,可以输出对应的具体数值,帮助还原颜色本真。 为了提高精度,防止周边环境干扰,在传感器底部添加了一块红外遮光片,最大程度减小了入射光的红外频谱成份,让颜色更加准确。板载自带四个高亮LED,可以让传感器在低环境光的情况下依然能够正常使用,实现“补光”的功能。模块采用I2C通信,拥有PH2.0和XH2.54(面包板)两种接口。将传感器放置于被测物体正面,间距控制在3~10mm之间。 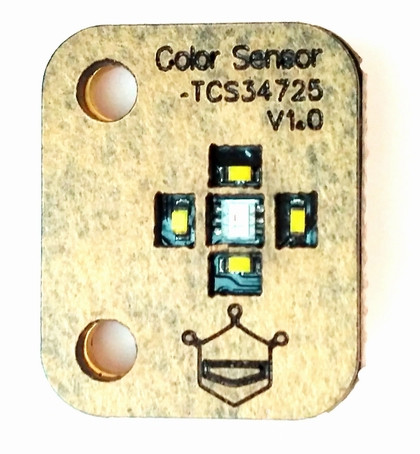 3.遥控麦昆 麦昆的主控microbit上集成了2.4G无线通讯,我们要在两块控制器之间建立无线通讯。首先要对两块主控进行频道匹配,使其在相同的频道上。再通过遥控手柄发送指令,遥控麦昆行走;同时麦昆经过不同的地表采集到色彩值通过自身所带RGBLED显示出来。具体数据通讯如下图9-4所示。 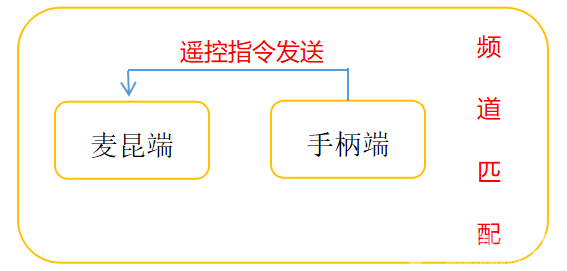 【操作实践】 1.结构搭建 由于本次使用的颜色识别传感器在麦昆车体上没有合适的结构件进行安装。我们使用3D建模软件Sketchup进行设计建模,如下图9-5所示。(模型在素材库中提供) 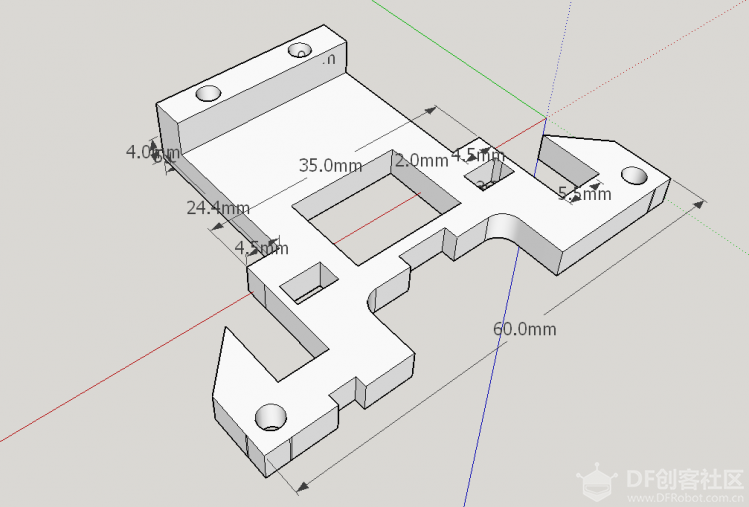 使用3D打印机打印结构件,将颜色识别传感器安装在此结构件上,如下图9-7所示,并与麦昆车体连接,完成麦昆结构设计与安装。 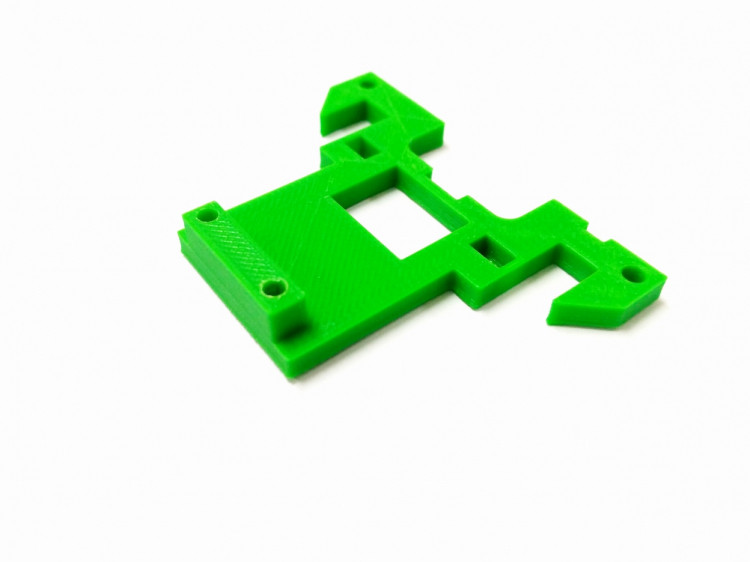 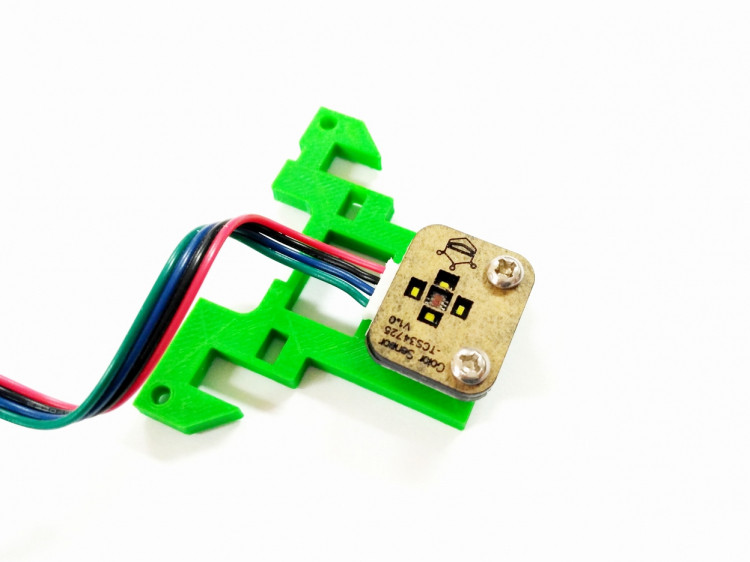  2.电路连线 本课中颜色识别传感器与麦昆车体前的IIC接口连接,具体连线如下图9-8所示。 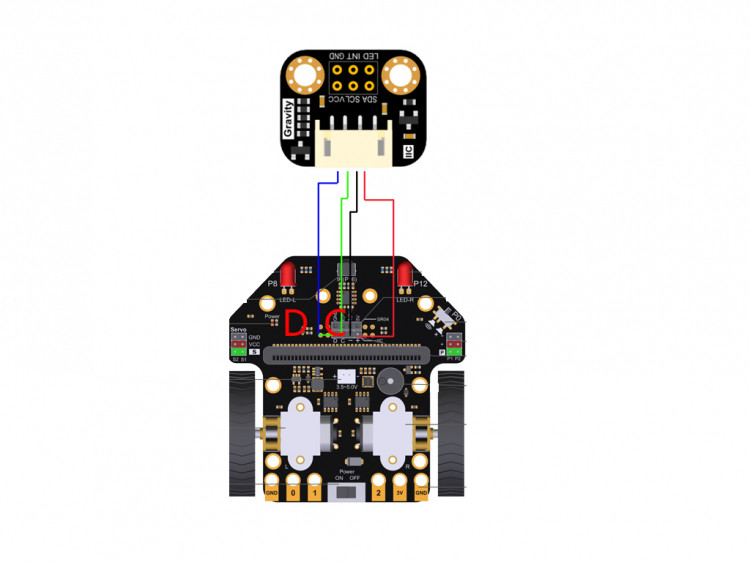 3.编写程序 手柄端:由于Mind+软件中没有专门为遥控手柄设定指令集,所以我们选择以motorbit电机驱动板的扩展指令集作为替代。手柄上的按钮对应端口如下图9-9所示。 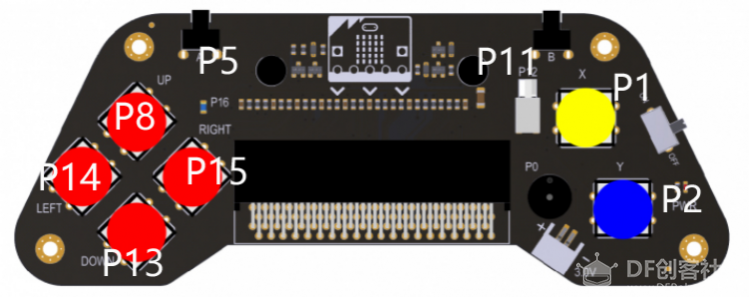 在手柄端我们定义了上下左右四个键用于控制小车前进(P8)、后退(P13)、左转(P14)、右转(P15),按钮P1用于控制麦昆掉头。手柄端局部程序如下图9-11所示。  麦昆端编程:小车通过颜色识别传感器识别出色块的RGB值后,通过自身所带的RGBLED反应出采集的色彩。我们将这一过程定义为函数:识别颜色。具体程序如下图9-12所示 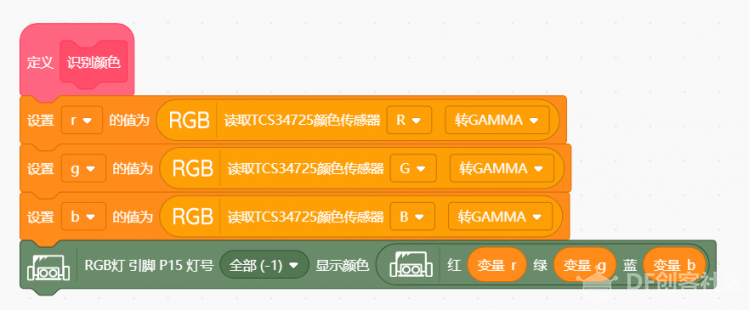 小车端进行数据通讯是采用的2.4G方式,编程部分先配置无线通讯频道,注意设置频道一定要与遥控端在同一频道下,部分程序如下图所示。  2.4g遥控接收端部分程序,当接收到“F”时,小车以200的速度前进;当接收到“B”时,小车以200的速度后退。同理对于接收到“L”“R”时,也进行相应的动作。  测试运行:分别对小车和手柄上电,稍后几秒待频道匹配后,通过手柄遥控小车分别途径红、绿、蓝不同颜色的地表,观察小车底部LED颜色变化。 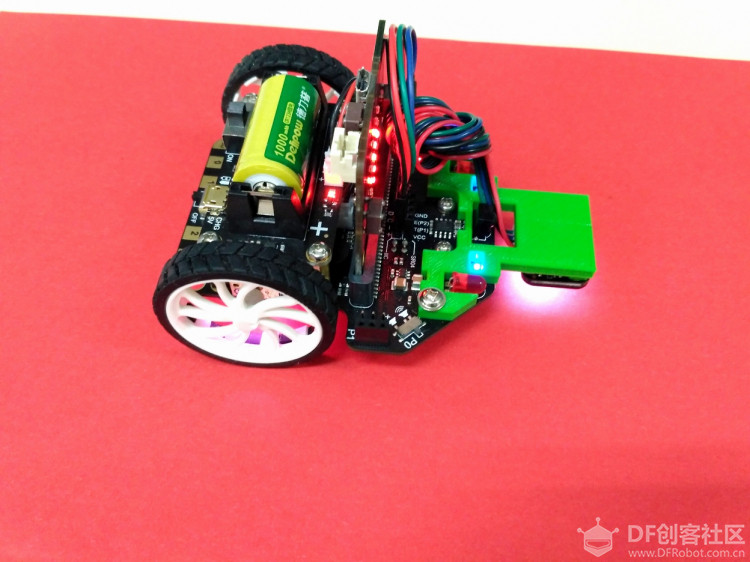 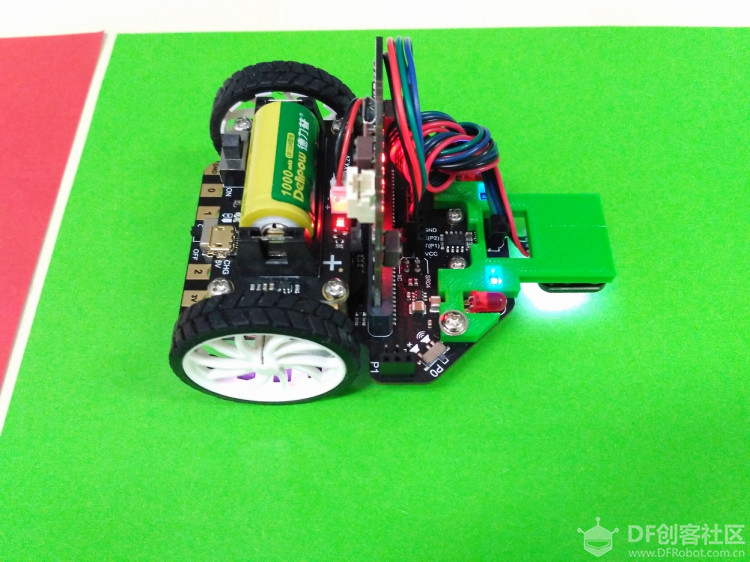  【创新拓展】 上述内容中已经实现了遥控手柄遥控麦昆探测星球地表信息,实现了单向信息通讯,但是无法及时获得麦昆采集的地表数据。请你修改程序,让麦昆可以及时回传地表数据。 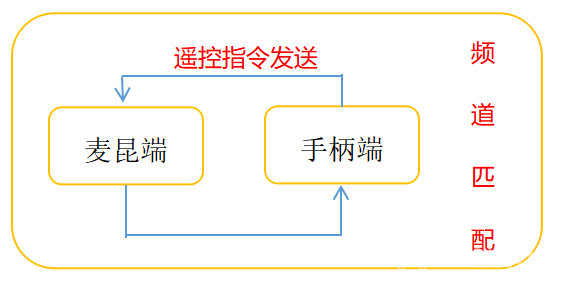 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






