|
8774| 5
|
[项目] AIOT——基于视觉识别的智能场馆控制系统 |

本帖最后由 hnyzcj 于 2019-11-10 22:42 编辑  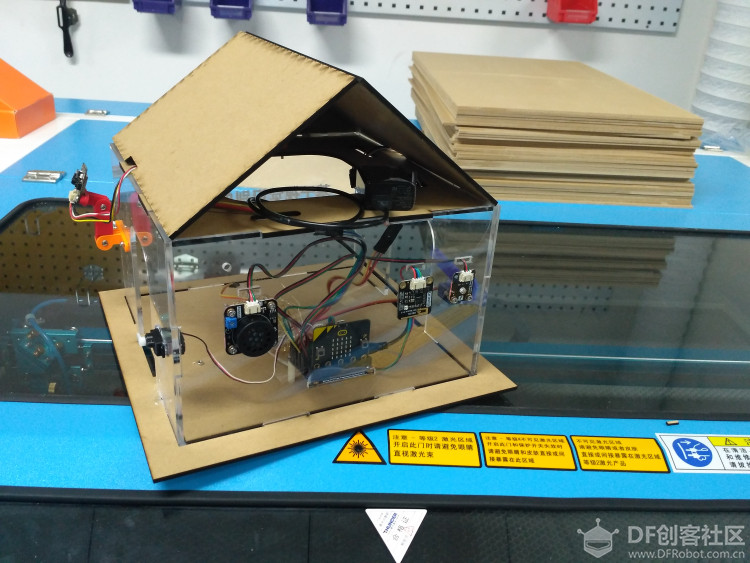 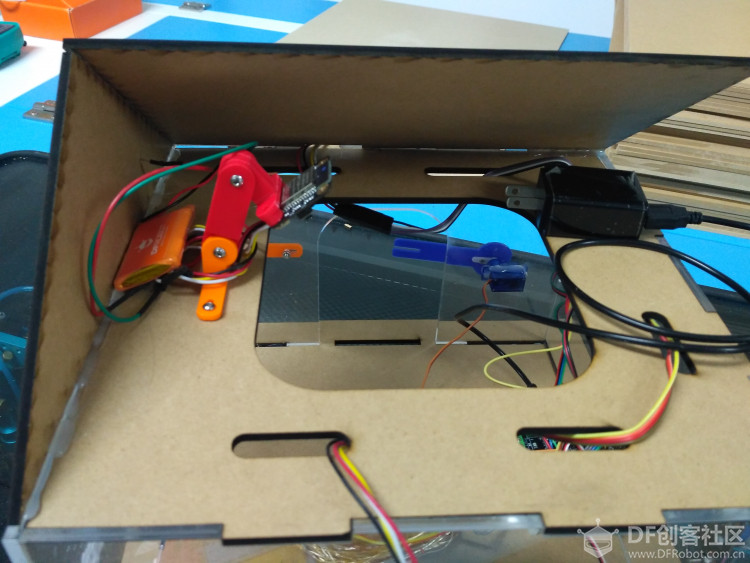 基于视觉识别的智能场馆控制系统是在智能门禁系统的基础上升级而来。其基本功能如下所示 【项目简介】 (1)智能门禁:本系统分为进口和出口,智能门禁(根据设定人数进行人员的智能控制),例如设定人数为5人,当达到5人后,进口不再打开,只能出人;当人员数为0时,出口不再打开,只能进人。从而实现场所内5人次的控制目标。(这里把原本人体红外热释电传感器替换为MU摄像头,以人体检测作为开关门禁的条件,同时一旦检测出其它物体,例如:球则提示违禁物品,不允许带入场馆) (2)人员计数:本系统在场外有个LED点阵,实时显示场所内的人员数目。同时记录参观总人数。分别用NUM和SUM表示,NUM表示为实时人数,SUM为参观总数。 (3)火灾预警:当展厅内出现明火信号,在展厅在LED显示火灾信号,进出口门禁同时打开,播放音乐。 (4)智能物联:NUM,SUM,火灾信号、违禁物品信号会实时上传物联网平台。 (5)实时图传:具有无线图传信号,可实时观察场馆内的信息。 【硬件材料】 MU视觉传感器 *3 火焰传感器 *1 带功放喇叭模块 *1 亚格利板、奥松板若干 【制作过程】 场所结构件:本次场馆的结构件使用亚格力版和奥松板。先在LaserMaker中进行绘制图纸,这里我使用了LaserMaker中的快速造盒功能。并对盒子结构体进行相应的修改,具体修改设置如下所示。 房间的四面 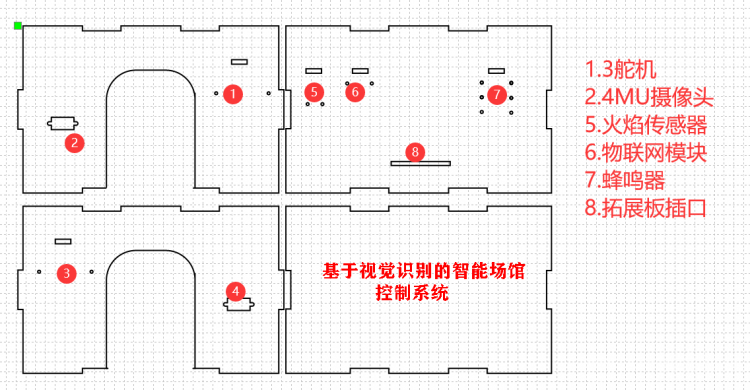 盒子前后面分别对应放置检测进、出门的摄像头和控制开关门的舵机。1-4分别为摄像头和舵机的安装孔位。左面为安放火焰传感器、物联网模块和蜂鸣器的孔位,其下部的长方形为拓展板插槽。 房间的顶面和地面 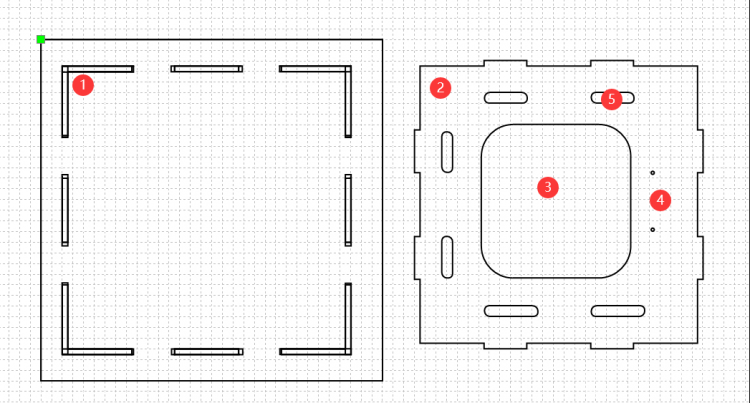 房间的底面设计如图中1部分所示,挖出了对应的孔位,这样房间的四面墙体直接插入对应的孔位即可,而不是默认盒子的拼接结构。(注意:底面我使用的是5MM的奥松板和而墙体使用的5MM的亚格力板,在设计画图时,底面孔位我适当的放大了0.5MM);房间的顶面如图标2所示,图标3处四边形孔是为了让MU摄像头能够实时观察场馆内的情况,图标4为MU摄像头安装点。图标5处为进出口MU摄像头的穿线孔。  房顶双坡面的结构,图标1处为支撑房檐侧面,图标2,3为房顶的两个坡面。 电路连线  电路连接如图所示,各模块与micro:bit电机驱动扩展板的连接如下:两个舵机分别接S3、S6;扬声器模块接P0;进出口的MU摄像头分别进入I2C口;火焰传感器接P2;用于监控馆内的摄像头只需要连接5V、GND口。OBLOQ物联网模块的Green接P15,Blue接P16,红色接5V黑色接GND。 注册物联网 登录EasyIoT物联网平台完成用户注册及设备添加。NUM显示并记录场所内实时的人员数据,SUM记录场所内曾经进入过的人次,如图7所示。  代码编写 本次程序编写使用的是Mind+软件,其中涉及到Microbit 、MU视觉传感器、物联网模块、电机拓展板、功能模块,因此在编写程序前先将这些模块添加上。  Microbit控制器——扩展——主控板  MU视觉传感器——拓展——传感器  OBLOGQ物联网模块——拓展——通讯模块  多线程——拓展——功能模块  motor:bit——拓展——拓展板  本项目中使用了3个MU视觉识别传感器,其中两个用于智能识别,一个用于WIFI图传。 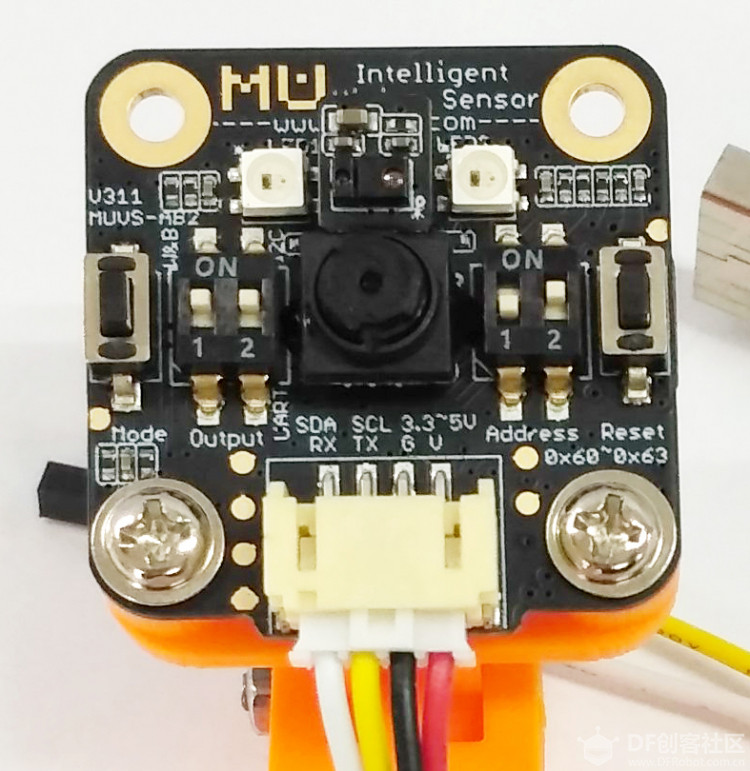 两个用于智能识别的MU视觉传感器将左侧Output处的拨码开关设置为01,一个用于WIFI图传的设置为11。而两个用于识别的MU视觉传感器都是通过拓展板上的I2C口进行数据通讯的,故需要对其进行地址设置。在MU视觉传感器右侧Address拨码开关处,分别将其设置为00和11。 程序初始化() 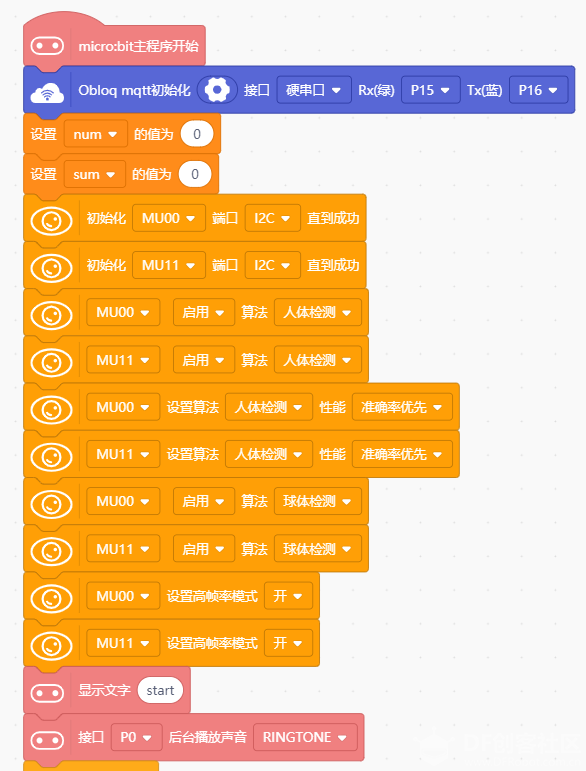 MU摄像头人体识别进口部分 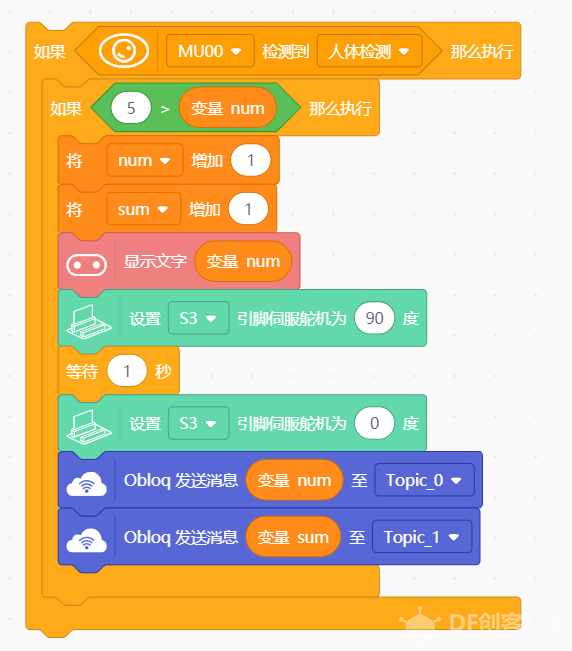 MU摄像头人体识别出口部分 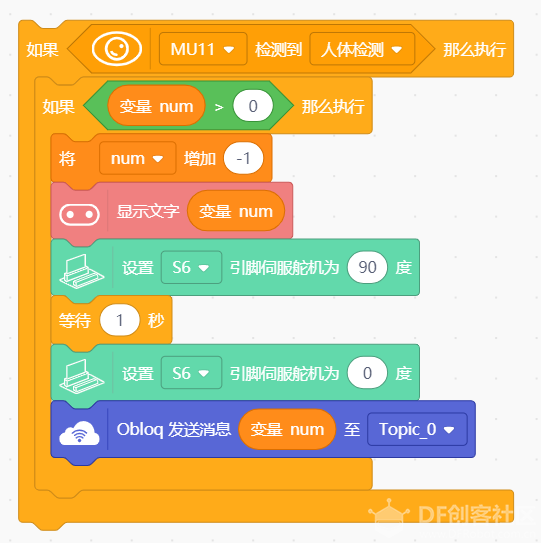 火焰报警部分(舵机、蜂鸣器、LED显示、物联网发送)我们需要这几个功能的并发,因此使用了多线程控制,就是可以多个程序同时被运行,不会有先后顺序。 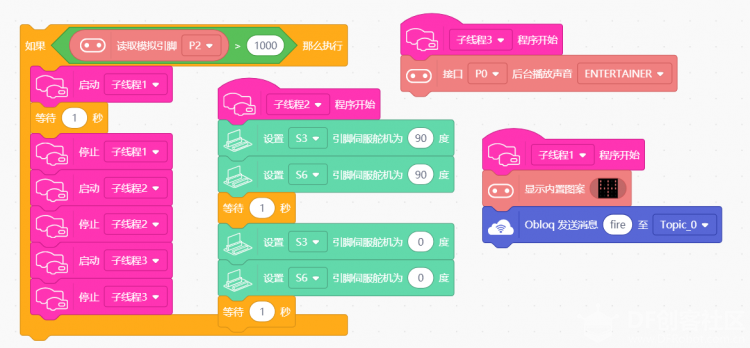 分别将舵机运转、蜂鸣器播放声音、LED显示和物联网发送定义为三个线程,可以实现这三者并发执行,而不至于出现三者之间相互干扰。 违禁物品识别部分  设备组装 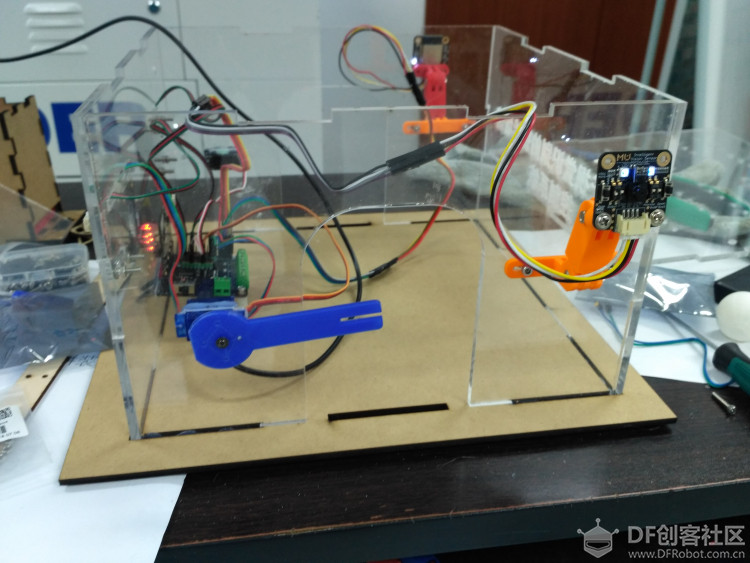 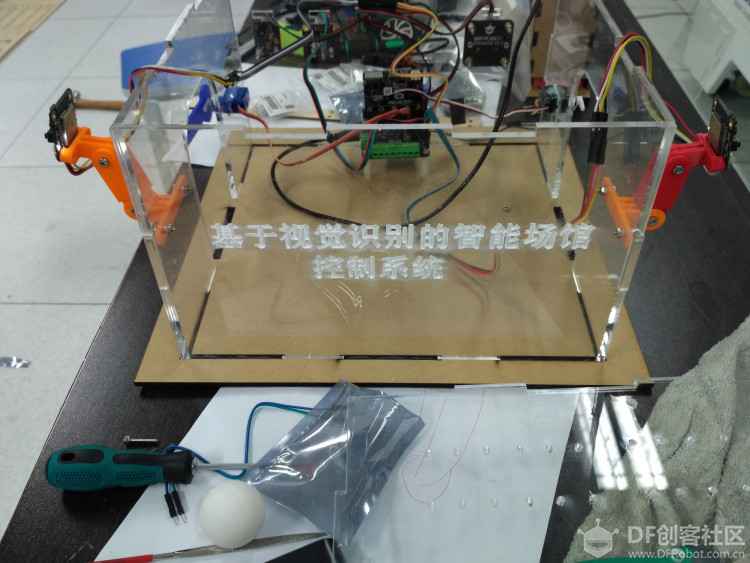 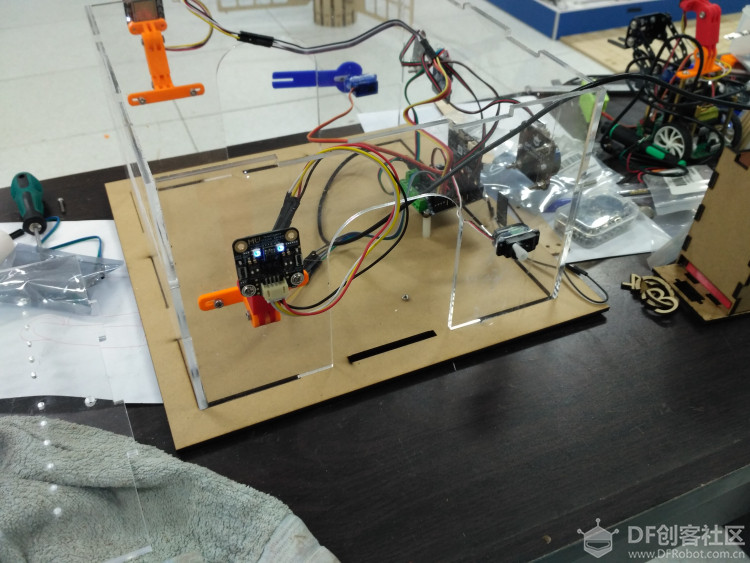 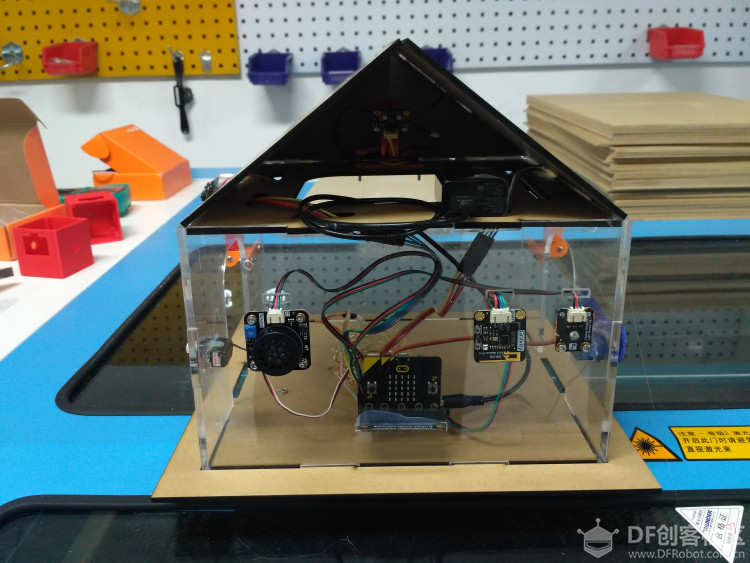 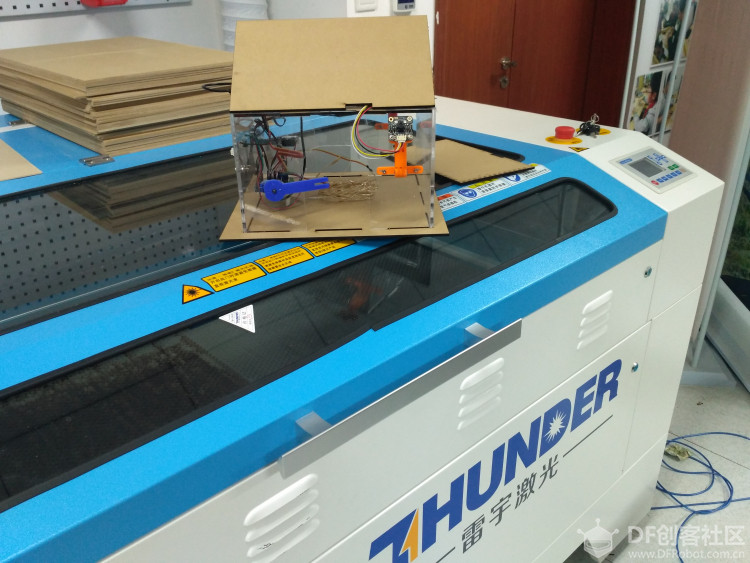 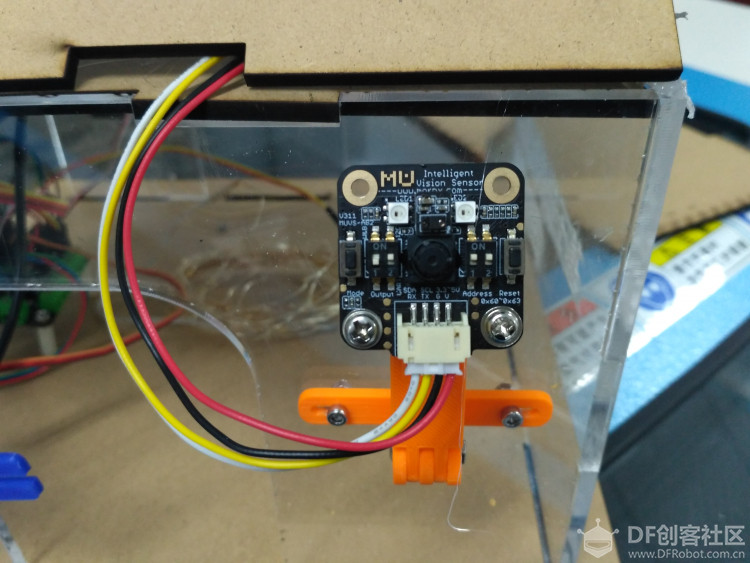 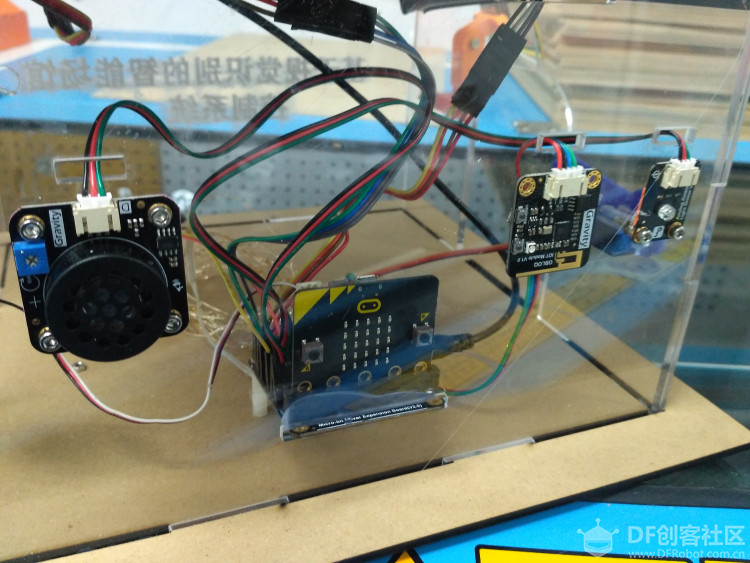 测试运行 数据上传及智能识别 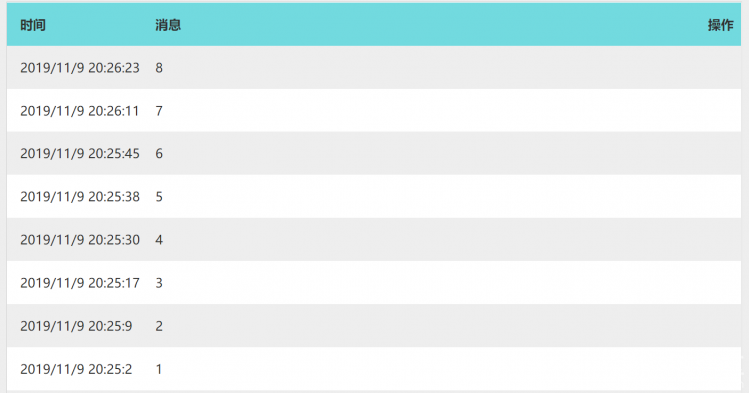 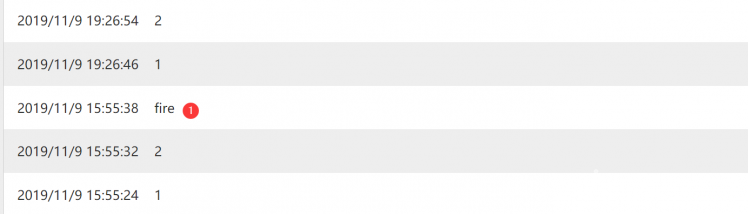 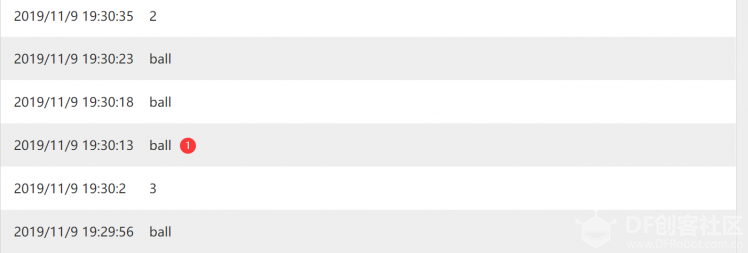 无线图传 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






