|
13890| 7
|
[项目] 撑控板&百灵鸽&千里马的完美结合——我的马儿快快跑! |
|
本帖最后由 斐斐课件 于 2019-12-3 04:19 编辑 这是撑控板&百灵鸽&千里马结合的第一贴,我的马儿快快跑!先让马儿跑起来,手贴黑胶带,这个马场难为马儿了,哈哈。 这两天是值的庆祝的日子,昨天收到了鸽子,千里马,今天收到了期待以久的掌控2.0。今天给领导搞了一天的PPT也没时间玩,只能晚上加班测试了!昨天测试了鸽子的BME280环境传感器,鸽子还是很给力的,解决了一个测温度、湿度、气压的一个大问题。今天来个N+大整合,鸽子+千里马。 还是先上图:鸽子不多说,千里马说介绍一下,说是两个循迹传感器,拿到之后发现是四个循迹传感器,这下赚大了,哈哈。不过提个意见,12与34之间距离太近了,最好在1cm以上,23的距离很好,中间是颜色传感器,千里马应该用的是意法半导体高速单片机,和MX1508电机驱动。 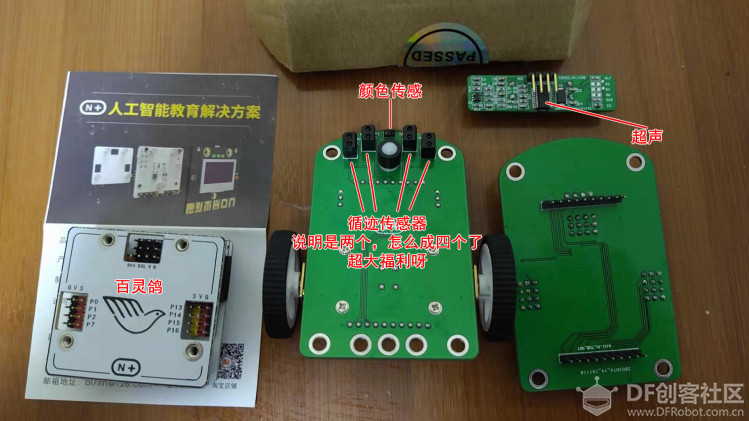 再提个意见,如图这个品字形的插座倒过来可能会更方便,意见纯属个人观点,哈哈! 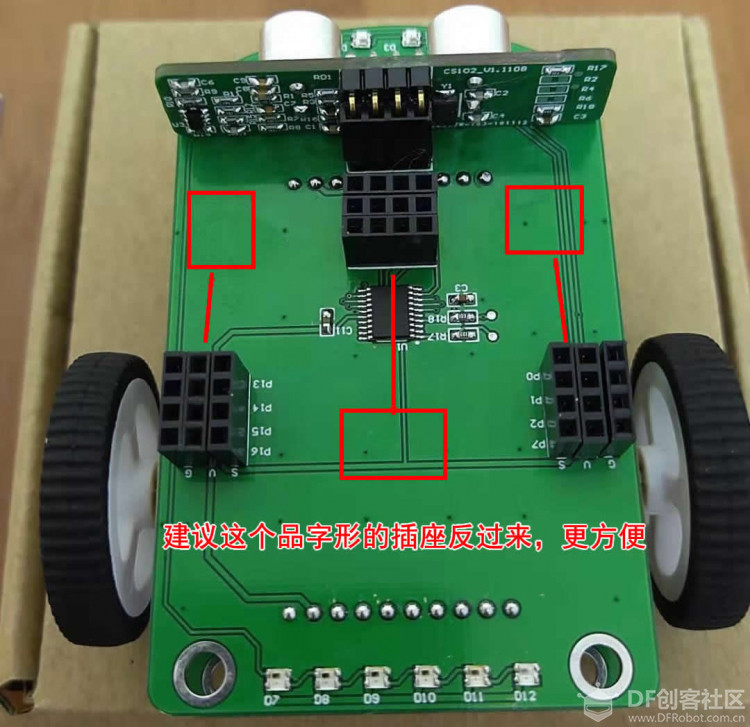 插上鸽子后,这个真心不方便,N+官方还是采纳我的意见吧,看图插上超声波,电源开关、数据线、充电线等等你还能方便用吗?  千里马&鸽子都是插接件,很方便,很赞! 再安装上掌控板,2.0版的还没上电,先用的去年11月份的,应该是第二批1.0的测试板。  下面用mpython编程,先让马儿跑起来,研究了半天发现积木块好像真的行不通,幸好今天中午咨询了N+何老师,发给我一个千里马的类库,提前研究了一下代码,少走了很多弯路,感谢何老师! 下面上代码:图形化的还真用不习惯,还是代码编程更清爽、干净、有层次,一目了然呀! 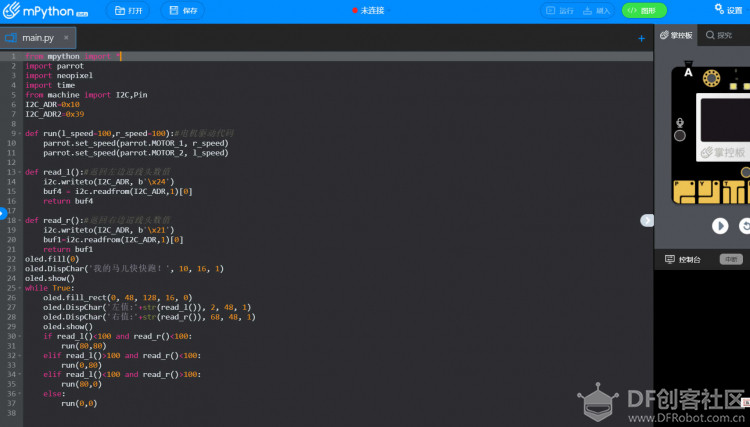  循迹传感器都在黑线上,马儿跑累了,休息一会儿! 附完整py代码:  main.zip main.zip |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶









