|
8842| 0
|
[教程] TF模块在pixhawk上定高方案 |
|
使用TF01模块在四轴飞行器下垂直向下安装,用来检测四轴飞行器的对地高度。测试的飞控平台是pixhawk,我们设计了一个数据转接板,将TF01的数据接收解析后再转发给pixhawk飞控。 1 Pixhawk定高原理简述pixhawk为APM、PX4的升级版,其中APM使用的是普通的8位单片机,运算能力有限,PX4是一个开始使用STM32F4的过渡性产品,而pixhawk是PX4基础上发展的更加完善和可靠的飞控。对于此系列开源飞控的介绍,可详细参考:http://ardupilot.org/,这个网站介绍的非常详细和可靠的介绍了pixhawk,完全可以按照这个网站来学习了解飞控。 Pixhawk定高的原理:
Pixhawk上常用的距离传感器有数据的输入方式有模拟输入、I2C输入、串口方式输入和PWM输入方式。具体可详细参考http://ardupilot.org/copter/docs/common-rangefinder-landingpage.html。 建议使用串口输入方式给pixhawk提供高度信息。同时需要注意的是,使用串口输入方式的情况下,TF01模块输出协议,固件版本最低为V3.3.3。 2.1.1接线图 图 1 (a) 串口输入方式连接示意图 图1 (b) 串口输入方式连接示意图 将飞控连至MP,在下面的CONFIG/TUNING栏里面选择左侧的Full Parameter List,找到并修改下面几个参数: · SERIAL4_PROTOCOL = 9 (Lidar) · SERIAL4_BAUD = 115 · RNGFND_TYPE = 8 (LightWareSerial) · RNGFND_SCALING = 1 · RNGFND_MIN_CM = 5 · RNGFND_MAX_CM = 1200 · RNGFND_GNDCLEAR = 5 单位是cm,或者使用更精确的值,取决于模块安装高度。 设置好这几个参数后,点击软件右侧的Write Params即可。 具体配置要点请参考图 2和图3: 图 2 串口参数配置 图 3 串口输入模式RNG参数配置 如果出现Bad Lidar Health错误,请首先检查TF01雷达发射窗口是否有红色LED光线发出,如果没有红色LED光线,请检查供电是否正常(SERIAL 4/5口供电pixhawk有时会供电不足)。如果发出了LED光线错误任然存在,请检查串口接线是否正确。如以上排查后仍无法显示正常距离值,请使用串口2连接(TELEM2)。接线方式无异如图1(b)所示,参数表中的串口配置项更改为 · SERIAL2_PROTOCOL = 9 (Lidar) · SERIAL2_BAUD = 115 使用AD输入方式依赖一块额外的转发板。我们将TF01模块的数据先发送给一个STM32板,然后使用STM32板将数据转换为pixhawk能检测的AD数据。同样需要注意的是TF01模块、转接板和pixhawk需要共地处理。如图4: 图 4 模拟输入方式连接示意图 3.1 连线说明 将距离数据使用模拟信号输入至pixhawk的连接方式如图5: 接线说明: 红色:3.3V供电 橙色:AD模拟信号 黑色:GND 图 5 模拟信号输入的接线说明 3.2 Mission Planner配置说明 将飞控连至MP,在下面的CONFIG/TUNING栏里面选择左侧的Full Parameter List,找到并下面几个参数: · RNGFND_PIN = “14” for Pixhawk’s ADC 3.3v pin #2 OR “0”for APM2.x · RNGFND_MAX_CM = “1200” (i.e. 12m max range) · RNGFND_SCALING = “4” (i.e. 4m / 1v) · RNGFND_TYPE = “1” (Analog) 其中,STM32的DA模块只能输出0-3.3V的电压。实验中,我们设置为当测量距离为12m时,输入给pixhawk的电压为3V。RNGFND_SCALING设置为4。(用户也可以自行设置,但是转发板里的也需要相应的改动。) 设置好这几个参数后,点击软件右侧的Write Params即可。 具体配置要点请参考图6: 图 6 模拟输入模式RNG配置要点 3.3 STM32转发板参考程序接收并解析TF01模块的距离信息:
DAC的配置:
主函数:
在Mission Planner的飞行数据栏里,点击左下方的Status栏,找到里面的sonarrange和sonarvoltage。其中sonarrange表示实际距离,sonarvoltage表示模拟输入电压。 参考图 7: 图 7 传感器距离测试参考图(测试传感器能否正确读取距离) 5 PID参数调试pixhawk的PID飞行参数调试全部可以在Mission Planner上完成,请参考此网站调试pixhawk的参数http://ardupilot.org/copter/docs/common-tuning.html。 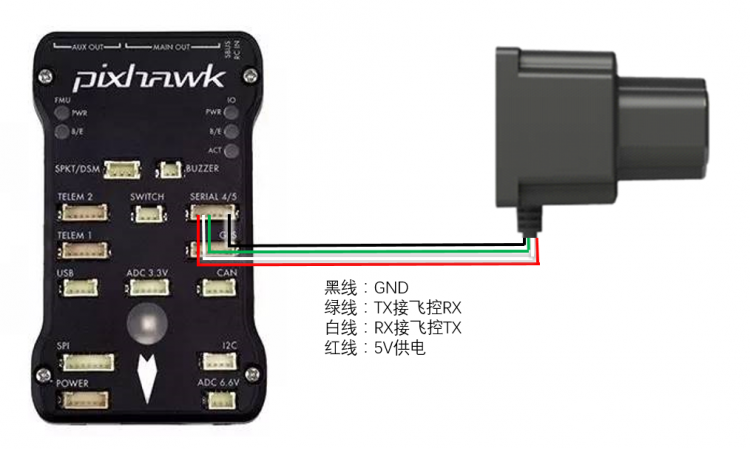   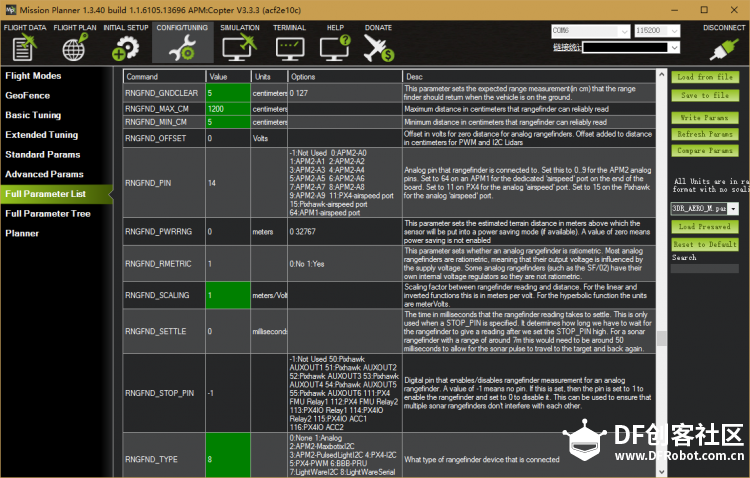 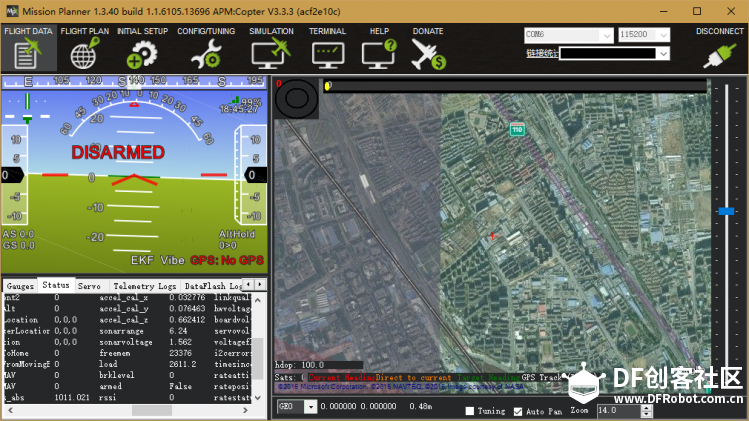  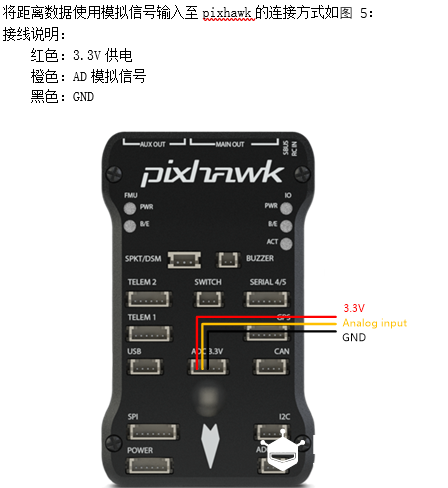 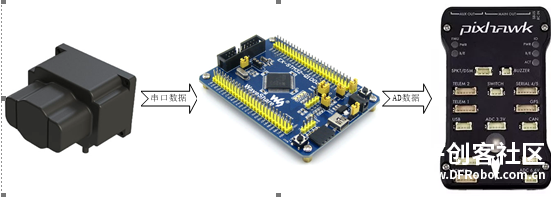 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






