|
8831| 8
|
[项目] 【mPythonX】N+千里马智能机器人——无线控制 |
 善跑的骏马,可以日行千里,掌控板的生态越来越友好! 2019年10月,百灵鸽正式问世;11月,小鸽子的伙伴千里马也来了! 12月29日,收到了桃李科技寄来的“千里马智能机器人”, 很高兴成为20名内测用户中的一员!今天分享一个《【mPythonX】N+千里马智能机器人——无线控制》。 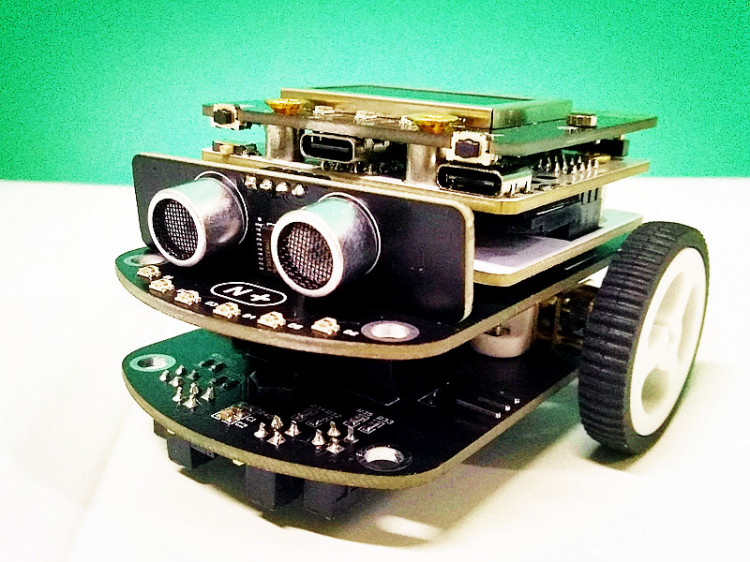 一、思路: 利用无线广播radio,通过A端掌控板控制B端千里马运行状态, 当A端掌控板P触摸按键,发送命令:qianjin, B端千里马前进; 当A端掌控板Y触摸按键,发送命令:houtui, B端千里马后退; 当A端掌控板T触摸按键,发送命令:zuozhuan,B端千里马坐转; 当A端掌控板H触摸按键,发送命令:youzhuan,B端千里马右转; 当A端掌控板O触摸按键,发送命令:xuanzhuan,B端千里马自转; 当A端掌控板N触摸按键,发送命令:stop, B端千里马停止; 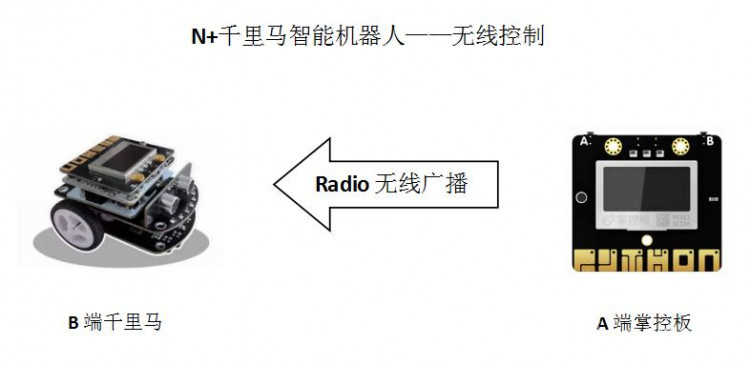 二、环境: 1.软件:mPythonX0.5.0 2、硬件: (1).千里马 (2).掌控板 (3).百灵鸽  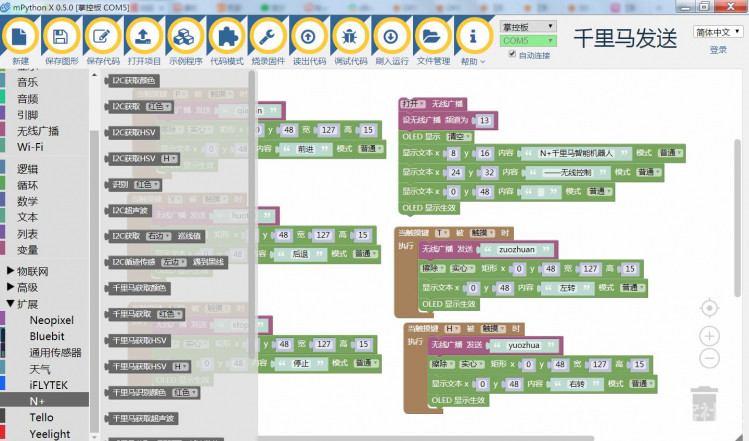 三、组装 1.巡线模块两路红外巡线传感器,方便实现老马识途,保证不会迷失方向。 2.动力模块两个金属电机为千里马提供动力,最大转速:45转/转;减速比:1:150 .  3.电源模块千里马有700MAH锂电池,超10H小时奔跑能力。 4.超声波模块为千里马配上识别远方的眼睛,不会迷失方向。  5.灯光模块12路1600万RGB彩灯,加上掌控板3路,渲染节日气氛。6.颜色模块颜色识别传感器,千里马识别黄色红色等颜色。  7.控制模块通过Radio无线通信,A端掌控板控制B端千里马。 8.声音模块内置音频功放及小喇叭,3.5mm音频接口,播放动听音乐。 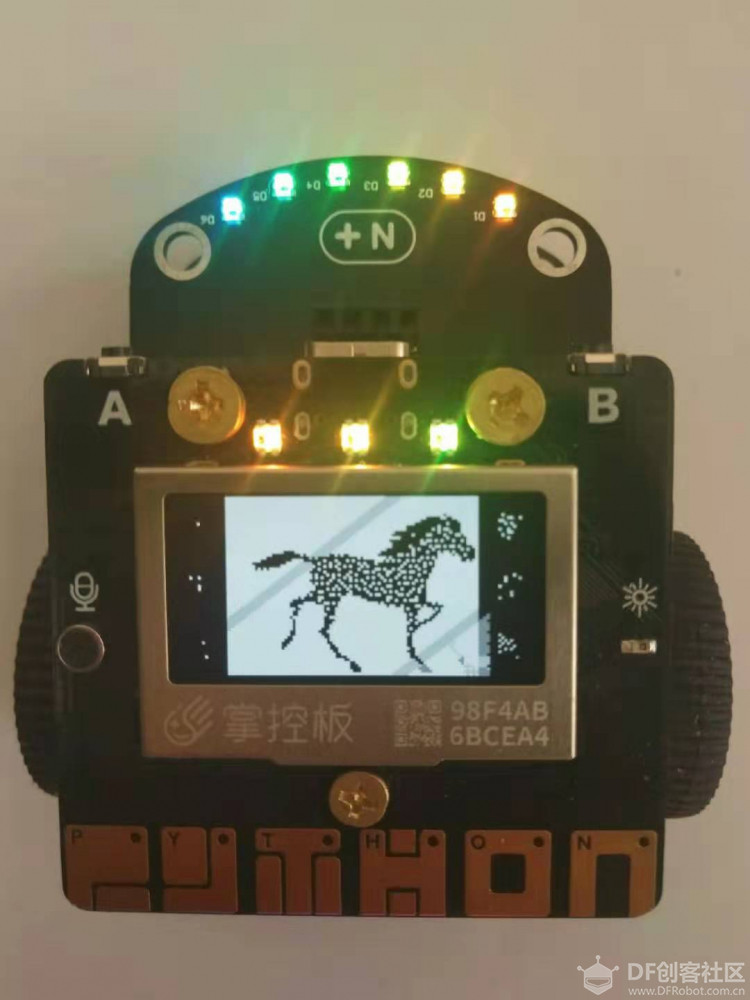 9.气象模块搭载BME280传感器,检测温度、湿度、大气压、海拔高度。 四、编程准备工作1.将Horse.py和 horse.pbm上传掌控板中 (1).mPythonX图形化对应的库叫lark.py, horse.py改名lark.py;文件名:horse.py (2).板载文件管理中,将ark.py上传到掌控板根目录下; (3).在板载文件管理中,新建“文件夹”pbm,将千里马图片上传pbm文件夹中。 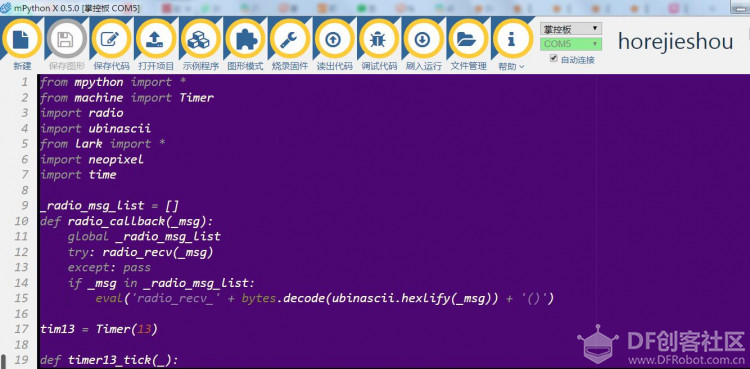  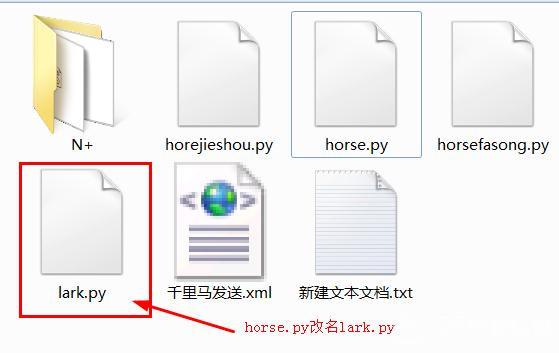  2.创建一个N+的目录文件名:N+.zip (1).N+文件解压缩 (2).将整个文件夹复制到mPythonX安装目录下 plugins 目录 (3).打开 mPythonX,左侧有扩展选项,找到”N+” 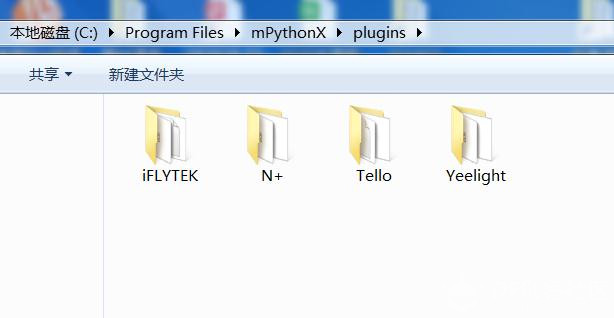 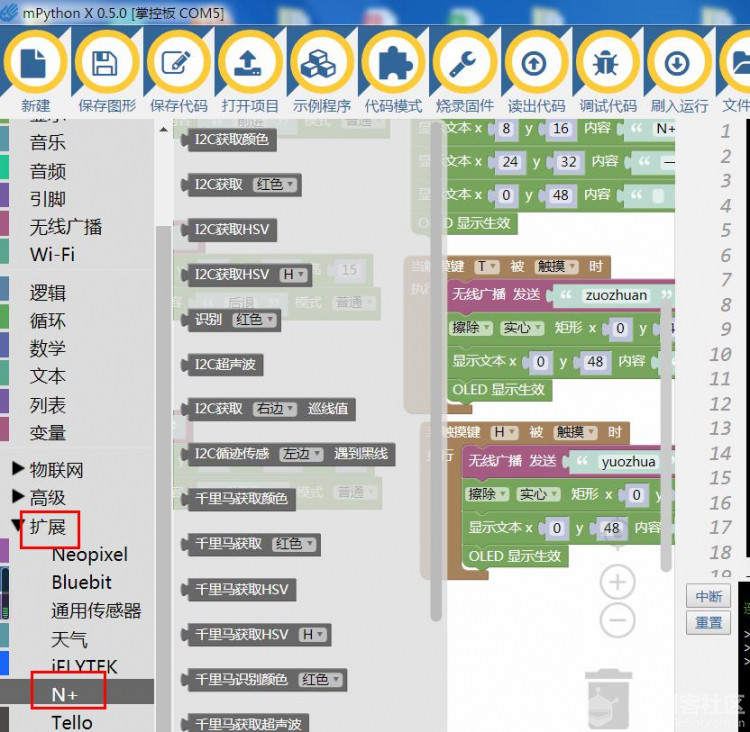 3.编写程序(1).控制A端掌控板   (2).授控B端千里马 1.运动千里马参考清者淡老师的“掌控板&如何让屏幕显示的图片动起来”。 文件名:gif分离.rar(1)利用gif分离工具,将horse.gif分解5个bmp图片, (2)pbm格式转换,打开链接:将你的文件格式在线转换成*.pbm格式; (3)打开mpythonX,连接掌控板,打开文件管理,新建文件夹(命名为pbm),然后将转好的pbm文件一个一个的上传至掌控板。   2.horse代码说明: 详细请见:文件名:千里马使用说明(简易版) 3.无线广播图形切换到代码模式。 (1)代码模式去掉motor = Motor() (2)前进:car.forward() (3)后退:car.backward() (4)停止:car.stop() (5)右转:car.turn_r() (6)左转:car.turn_l() B端千里马python代码: 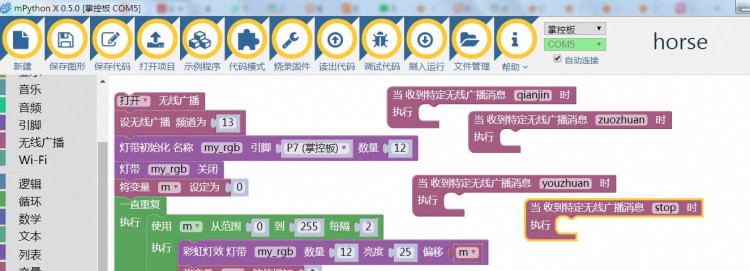 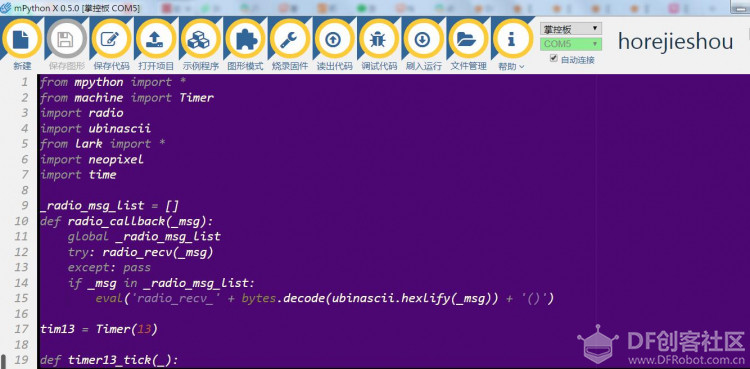 [mw_shl_code=python,true]from mpython import * from machine import Timer import radio import ubinascii from lark import * import neopixel import time _radio_msg_list = [] def radio_callback(_msg): global _radio_msg_list try: radio_recv(_msg) except: pass if _msg in _radio_msg_list: eval('radio_recv_' + bytes.decode(ubinascii.hexlify(_msg)) + '()') tim13 = Timer(13) def timer13_tick(_): _msg = radio.receive() if not _msg: return radio_callback(_msg) tim13.init(period=20, mode=Timer.PERIODIC, callback=timer13_tick) my_rgb = neopixel.NeoPixel(Pin(Pin.P7), n=12, bpp=3, timing=1) def make_rainbow(_neopixel, _num, _bright, _offset): _rgb = ((255,0,0), (255,127,0), (255,255,0), (0,255,0), (0,255,255), (0,0,255), (136,0,255), (255,0,0)) for i in range(_num): t = 7 * i / _num t0 = int(t) r = round((_rgb[t0][0] + (t-t0)*(_rgb[t0+1][0]-_rgb[t0][0]))*_bright)>>8 g = round((_rgb[t0][1] + (t-t0)*(_rgb[t0+1][1]-_rgb[t0][1]))*_bright)>>8 b = round((_rgb[t0][2] + (t-t0)*(_rgb[t0+1][2]-_rgb[t0][2]))*_bright)>>8 _neopixel[(i + _offset) % _num] = (r, g, b) car=Car() _radio_msg_list.append('qianjin') def radio_recv_7169616e6a696e(): global m car.forward(100) _radio_msg_list.append('houtui') def radio_recv_686f75747569(): global m car.backward(-100) _radio_msg_list.append('zuozhuan') def radio_recv_7a756f7a6875616e(): global m car.turn_l(50,100) _radio_msg_list.append('youzhuan') def radio_recv_796f757a6875616e(): global m car.turn_r(100,50) #_radio_msg_list.append('xuanzhuan') #def radio_recv_7875616e7a6875616e(): # global m #car.revolve(-100,100) _radio_msg_list.append('stop') def radio_recv_73746f70(): global m car.stop() image_picture = Image() radio.on() radio.config(channel=13) m = 0 while True: for m in range(0, 256, 10): make_rainbow(my_rgb, 12, 25, m) m = m + 1 my_rgb.write() oled.fill(0) oled.blit(image_picture.load("pbm/horse1.pbm", 0), 0, 0) oled.show() time.sleep_ms(50) oled.fill(0) oled.blit(image_picture.load("pbm/horse4.pbm", 0), 0, 0)[/mw_shl_code]五、视频回放: 六、知识拓展: 超声波传感器 声波,人的耳朵能听到的声波频率为20-200002,当声波动频率大于20000H2时,人耳无法听到。超声波因其频率下限大约等于人的听觉上限而得名。因此,我们把频率高于2000的声波称为“超声波”,超声波传感器是将超声波信号转换成电信号的传感器,有两个探头,一个发射超声波,另一个接收。有效测距面围为2--400CM,2CM以内为盲区。 感谢各位技术老师大力支持,谢谢你们,本产品来源:N+ |
|
mPythonX图形化对应的库叫lark.py, horse.py改名lark.py;文件名:horse.py 千里马使用说明(简易版) (3).docx3.无线广播图形切换到代码模式。 (1)代码模式去掉motor = Motor() (2)前进:car.forward() (3)后退:car.backward() (4)停止:car.stop() (5)右转:car.turn_r() (6)左转:car.turn_l() |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






