|
2346| 1
|
使用古德微树莓派套件进行语音控制红外玩具的实践 |
|
项目介绍 该项目最初想要达到的目标是:红外遥控玩具(例如四驱车或小机器人)能够响应自然语言的指令,进行相应的动作(例如用户说“前进”后玩具就朝前运动,用户说“停止”玩具就停下来)。 要达到这样的目标需要的条件: 1有设备将红外玩具遥控器发射的信号存储下来,并能按用户要求发射不同的信号 2语音识别功能---识别用户的具体语言(语义理解) 3一种对应关系---建立在语音指令和红外控制信号之间 古德微的树莓派人工智能套件可以满足以上条件1和2--- 使用RPi3的一种红外线扩展板并配置Debian平台上的lirc软件包,能够实现对玩具红外信号的录制和发送; 而古德微软件平台提供了语音识别以及相应的控制方式。因此就要考虑:如何使红外控制信号响应语音指令。 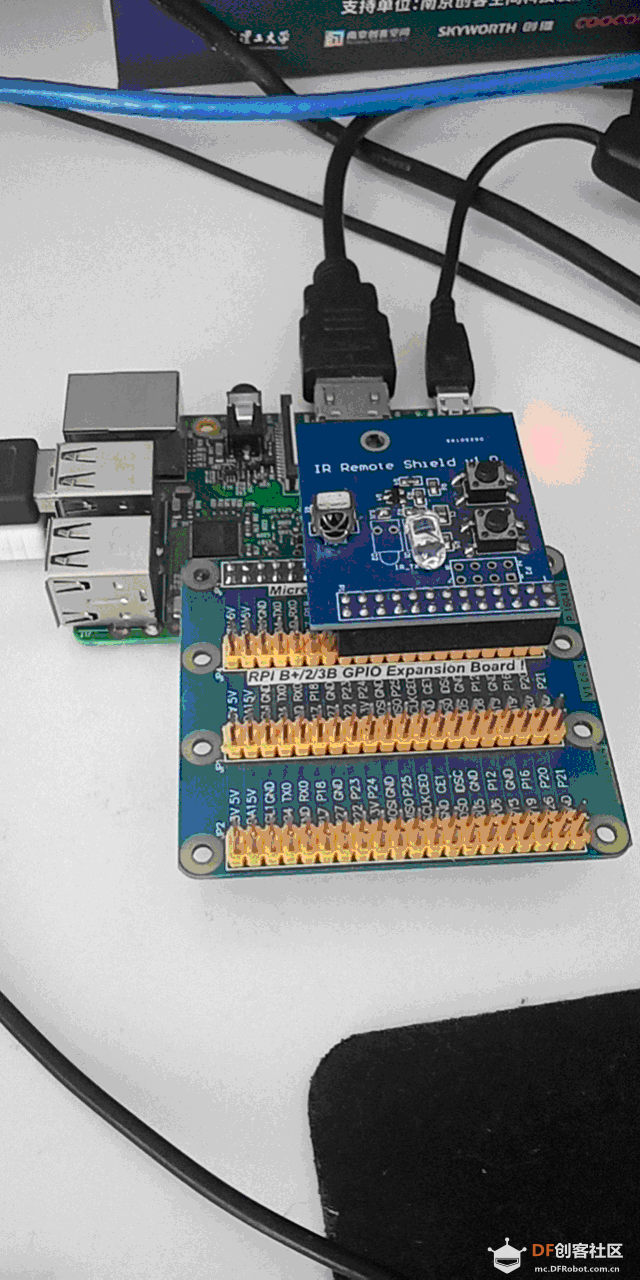 如上图所示:此配件为红外线扩展板,可以将玩具的控制信号录制保存,并通过命令行来进行发送。下图为实际的一款遥控机器人的红外信号录制后所形成的命令 如上图所示:此配件为红外线扩展板,可以将玩具的控制信号录制保存,并通过命令行来进行发送。下图为实际的一款遥控机器人的红外信号录制后所形成的命令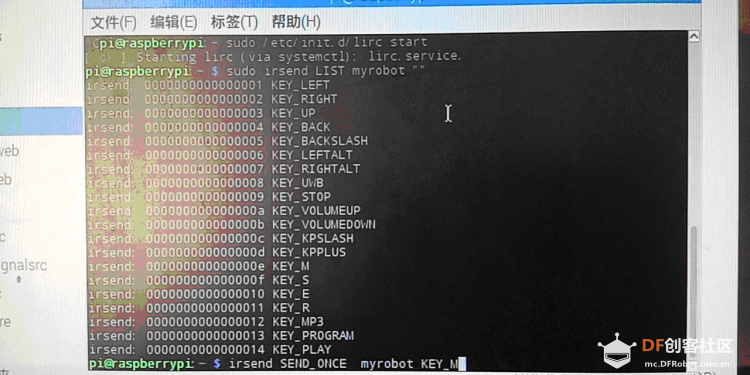 语音控制的实现途径:在本地实现了一个网页控制界面,用网页上的按钮代替命令行来进行操作;在古德微软件平台使用网络爬虫的request功能来调用相应的功能。下图为遥控机器人对应的功能按钮。 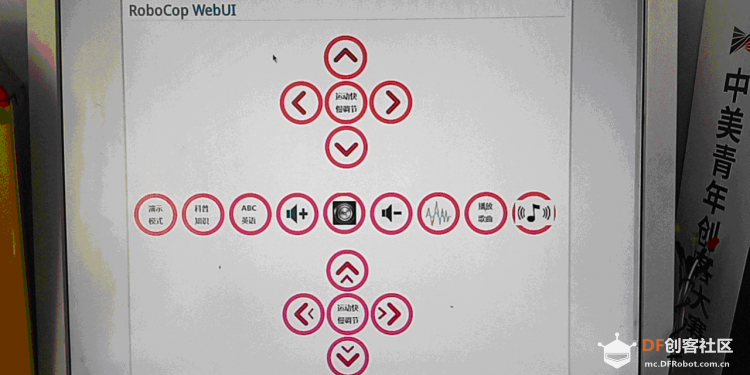 在树莓派中使用如下的积木块可以实现按下相应功能按钮的操作  以此为基础就可以在编程环境中编写如下的程序。至此,达到了该项目所设定的目标:语音控制遥控玩具。 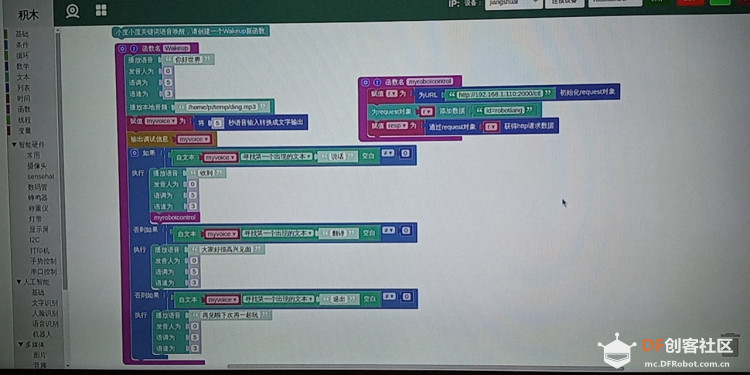 如何使用扩展板录制红外信号以及编写网页控制界面,见下面的参考资料 参考资料: 1树莓派专用红外线扩展板 http://ukonline2000.com/?p=296 2 录制的红外控制信号web访问 http://opensourceuniversalremote.com/ http://alexba.in/blog/2013/11/02/lirc-web-nginx-and-upstart/ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







