|
2229| 1
|
【临沂】【古德微机器人】学习记录4(夜骑警示灯) |
|
学习记录4(夜骑警示灯) 1.杜邦线知识:【公对公】【公对母】【母对母】 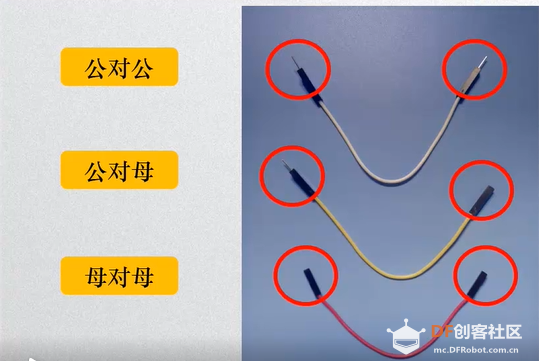 2.判断led灯正负极 ①观察引脚长短,引脚长的为正极,引脚短的为负极。 ②观察led二极管内部,支架大的衔接的引脚是负极,支架小的连接的引脚是正极。 ③用指针式万能表或者数字万能表进行测试。 3.用杜邦线将3盏灯连接到23-24-25号端口上。 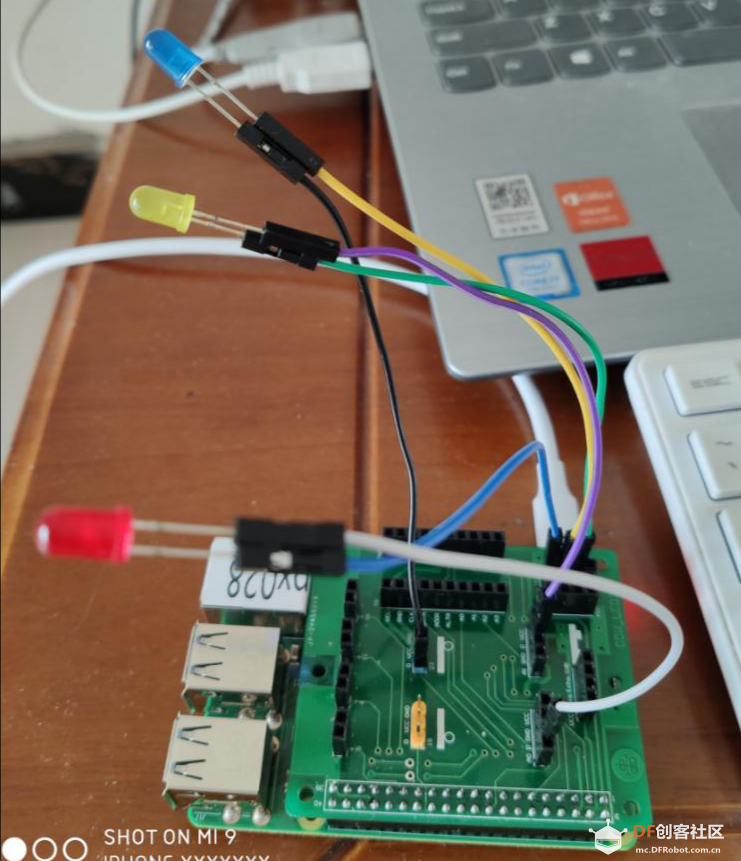 4.实用程序控制3盏灯依次规律闪烁 ①常规设置(使用循环语句,将23-25号端口依次罗列),数量过多,积木操作麻烦。 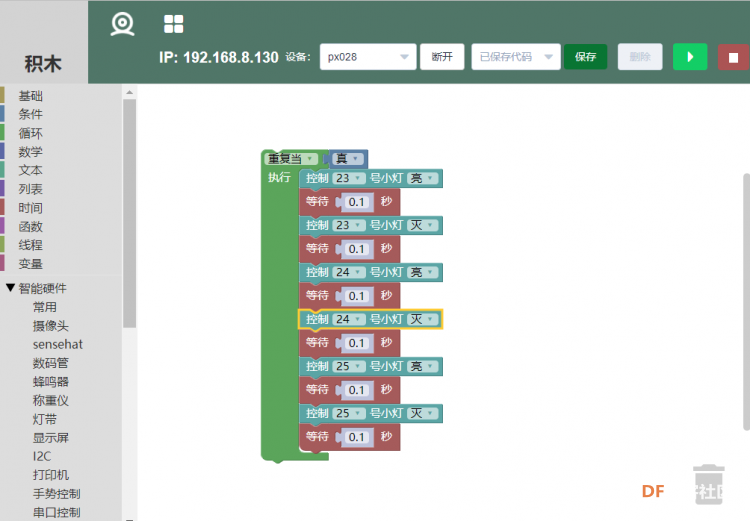 ②使用for循环控制 引入GPIO积木:GPIO(英语:General-purpose input/output),通用型之输入输出的简称,其接脚可以供使用者由程控自由使用。 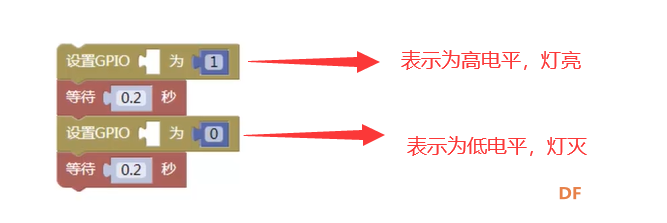 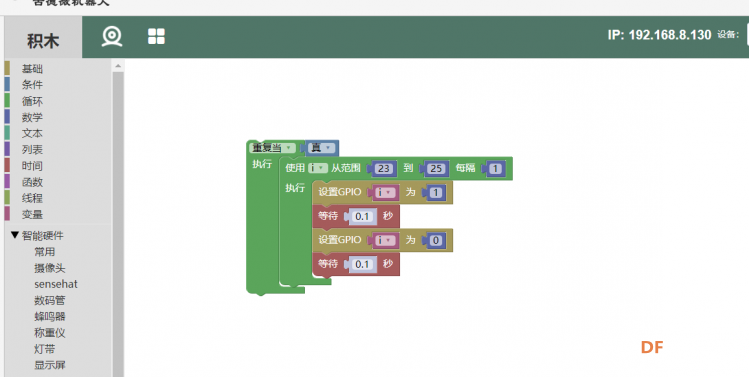 5.项目升级,规则改变,每一次循环频率一致,不同循环频率不一致。使用双层嵌套,引入全局变量【频率】和局部变量【i】、【j】,这种方法符合要求,但是观察后会发现,灯循环闪烁的频率是越来越慢的,从0.02s到0.2s循环。 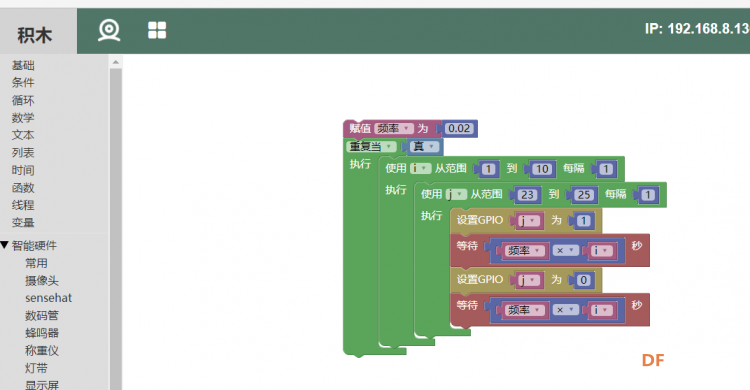 6.脑洞大开,如果想真正实现不同循环频率不同,能否使用随机函数, 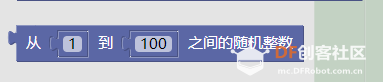 通过数学积木把数值变为小数  整合积木块  功能实现。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






